Изобретение относится к области механизации и автоматизации технологических процессов и может быть использовано для поштучной выдачи плоских деталей из бункера к прессам или другим обрабатывающим машинам.
Известен вакуумный захватный орган, содержащий полый корпус с присоской, укрепленный в держателе, подвижном в направлении, перпендикулярном поверхности захватываемой заготовки (детали), расположенный в корпусе подвижный в направлении движения держателя шток, двуплечий рычаг, установленный на оси в держателе с возможностью взаимодействия одним концом с установленным на пути движения держателя неподвижным упором и шарнирно связанный другим концом со штоком.
Шток снаожен поршнем, размещенным в выполненной в корпусе цилиндрической полости, соединенной отверстием с полостью присоски, а также пружиной, действующей на поршень в направлении, обратном направлению движения держателя 1.
Недостатком известного вакуумного захватного органа является сложность, конструкции.
Ближайшим к изобретению по совокупности существенных признаков и достигаемсяиу эффекту является вакуумный захватный орган, содержащий корпус, в котором выполнен канал, связанный с источником вакуума 2.
Недостатком известного вакуумного захватного органа является ненадежный захват детали.
10
Целью изобретения является повы шение надежности захвата детали.
Поставленная цель достигается тем, что вакуумный захватный орган, содержащий корпус с каналом, связанным
15 с источником вакуума, снабжен закрепленным в канале соосно с ним стержнем, установленным с возможностью взаимодействия одним концом с деталью, в корпусе выполнены кольцевые канав20ки, открытые со стороны рабочего торца, и отверстия, связывающие полость канавок с полостью канала и расположенные над стержнем.
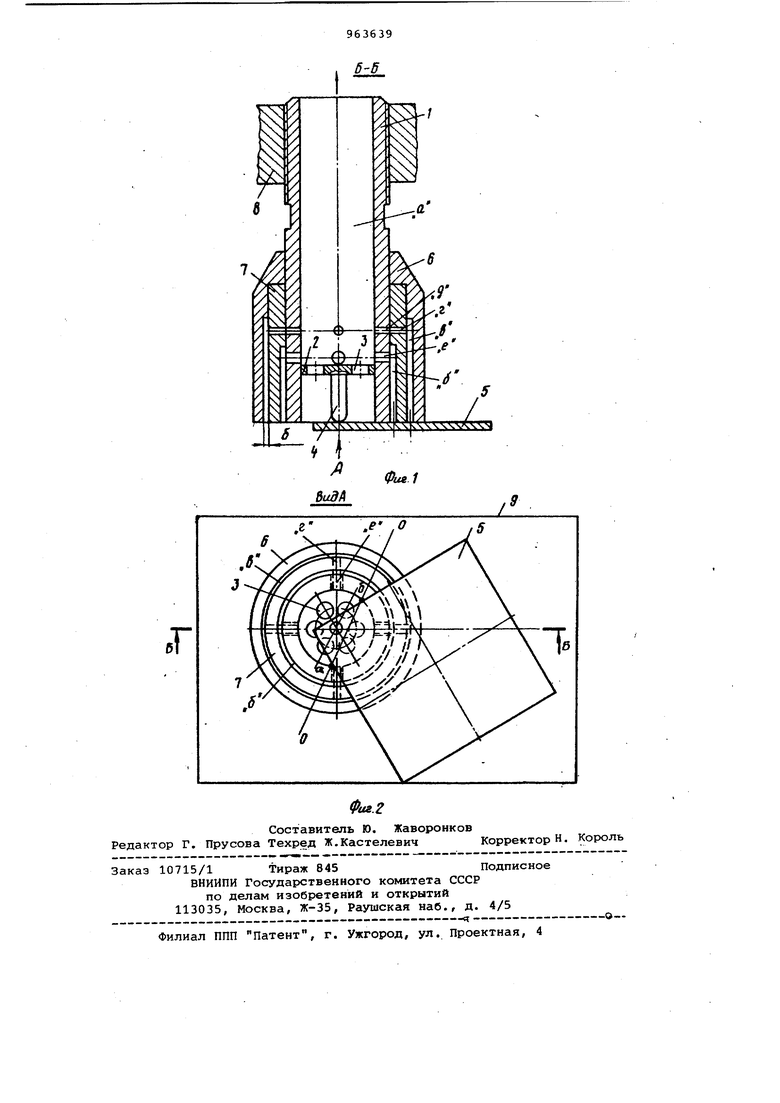
На фиг. 1 показан вакуумный зах25ватный орган, продольное сечение; на фиг. 2 - вид А на фиг. 1.
Вакуумный захватный орган содержит полый корпус 1, в полости а которого, имеющей цилиндрическую форму,
30 установлен диск 2 с отверстиями 3 и стержнем 4, расположенным со стороны корпуса, обращенной к перемещаемой детали 5. На наружной стороне корпуса 1 за креплены концентоично втулки б и 7. На внутренних сторонах втулок 6 Hi 7 выполнены кольцевые канавки, oep зующие полость б межлу наружной стороной корпуса 1 и внутренней стороно втулки 7 и полость в между наружной стороной втулки 7 и внутернней стороной втулки б. Полости бив имеют форму узких концентрических щелей, открытых со стороны нижнего торца корпуса 1. Ширина щелей (полостей бив) рав на от 0,15 до 0,25 мм, Полость в связана с полостью а через отверстия г, выполненные во втулке 7, и отверстия д, выполненные в корпусе 1. Полость б связана с полостью а через отверстия е, выполненные в кор пусе 1. Отверстия д расположены по окружности и выполнены над отверстиями е, расположенными также по окружности. Корпус 1 закреплен на держателе 8 а под корпусом 1 расположен бункер 9 для размещения деталей 5. Канал а связан с источником вакуума (не пока зан). . . Вакуумный захватный орган работае следующим образом. Держатель 8 перемещает корпус 1 вниз до взаимодействия его нижнего торца с деталями 5, расположенными в бункере 9. Источник вакуума создает разрежение в канале а. Деталь 5 прижимается к нижнему торцу корпуса. При неполном перекрытий канала а деталью 5 эта деталь удерживается от поворота в вертикальной плоскости стержнем 4. В полостях в и б также создается разрежение и деталь 5 удерживается на нижнем торце корпуса 1. Эффект от использования вакуумного захватного .органа заключается в повышении надежности захвата детали. Формула изобретения Вакуумный захватный орган, содержащий корпус с каналом, связанным с источником вакуума, отличающий с я тем, что, с целью повышения надежности захвата деталей, вакуумный захватный орган снабжен закрепленным в канале соосно с ним стержнем, установленным с возможностью взаимодействия одним концом с деталью, в корпусе выполнены кольцевые канав ки, открытые со стороны рабочего торца, и отверстия, связывающие полость канавок с полостью канала и расположенные над стержнем. Источники информации, принятые во внимание при экспертизе 1.Авторское свидетельство СССР № 342712, кл. В 21 D 43/18, В 30 В 15/30, 11.09.70. 2.Авторское свидетельство СССР по заявке 3221881/25-27, ;кл. В 21 П 43/18, В 30 В.15/30, 18.12.80 (прототип).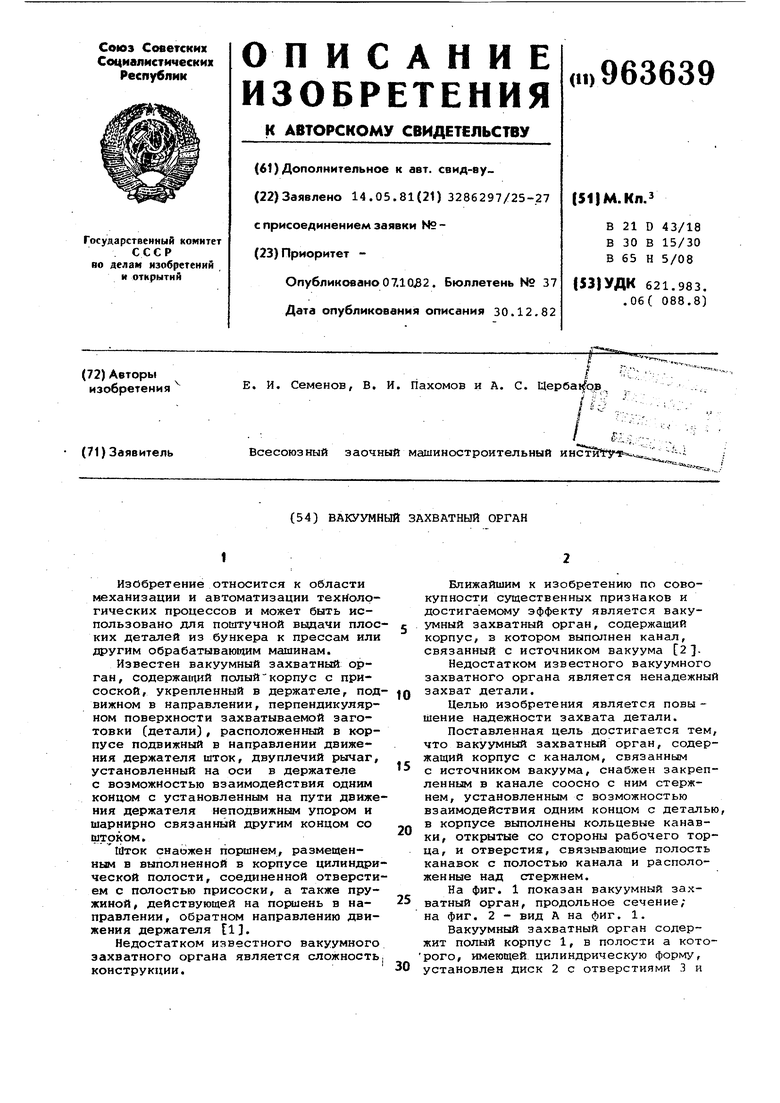
| название | год | авторы | номер документа |
|---|---|---|---|
| Пневматический захватный орган для плоских деталей | 1981 |
|
SU988423A1 |
| Пневматический захватный орган | 1981 |
|
SU988425A1 |
| Вакуумный захватный орган | 1981 |
|
SU1011308A1 |
| Вакуумный захватный орган | 1981 |
|
SU1107936A1 |
| Вакуумный захватный орган для плоских заготовок | 1983 |
|
SU1110528A1 |
| Вакуумный захватный орган | 1985 |
|
SU1294434A1 |
| Захватный орган для тонколистовых заготовок | 1985 |
|
SU1346308A1 |
| Вакуумный захватный орган | 1980 |
|
SU946743A1 |
| Вакуумный захватный орган | 1977 |
|
SU644579A1 |
| ОЧУВСТВЛЕННЫЙ ВАКУУМНЫЙ ЗАХВАТ | 2005 |
|
RU2283751C1 |