t1294
Изобретение относится к машине- ; строению, в частности к промышленным роботам для механизации технологических процессов сборки под сварку, подачу деталей на обрабатывающие центры и т.д.
Цель изобретения - упрощение конструкции и повьпиеиие точности позиционирования за счет ликвидации одного из приводов поворота.
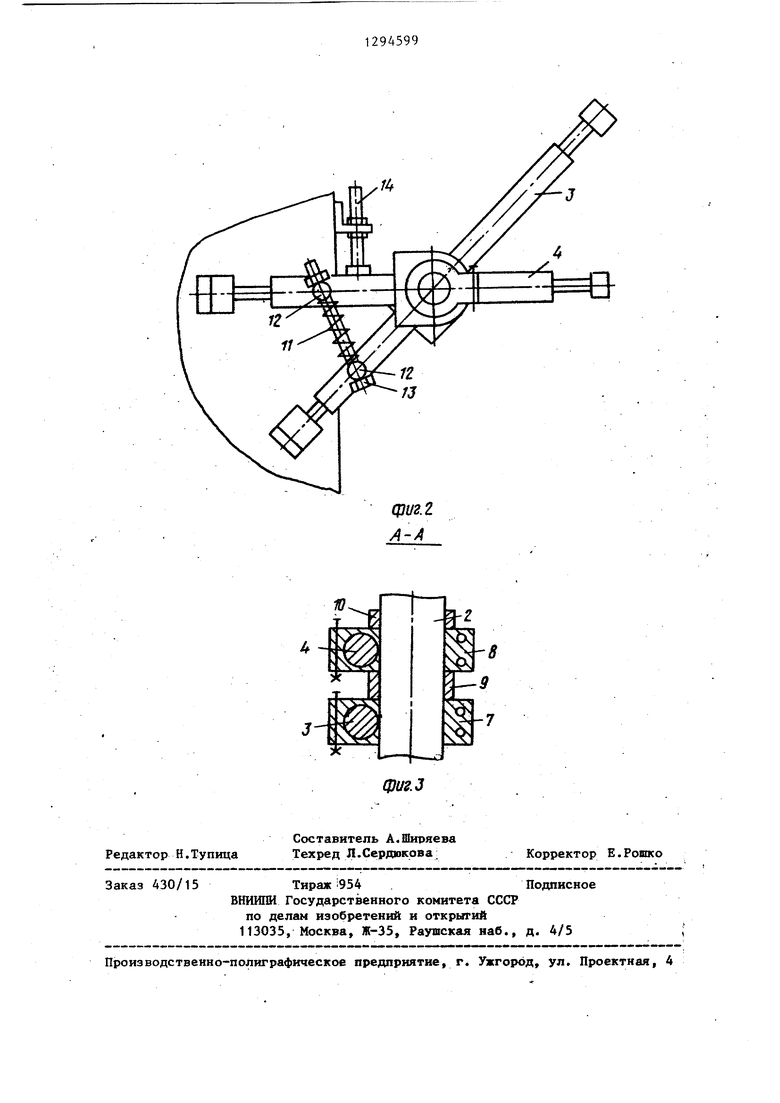
На фиг. 1 изображен промьшшенный робот; на фиг. 2 - то же, вид сверху; на фиг. 3 - сечение А-А на фиг. 1.
Промышленный робот состоит из ос- нования 1, на котором установлена поворотная колонна 2, совершающая поворот вокруг вертикальной оси, и механических рук 3 и 4, которые несут захваты 5 и 6. Механическая рука 3 жестко установлена на поворотной колонне 2 посредством замка 7, а механическая рука 4 установлена на поворотной колонне 2 с возможностью поворота посредством замка 8 и установлена на опорном подшипнике 9 Хомут 10 стабилизирует горизонтальное положение механической руки 4, которая шарнирно соединена с механическо рукой 3 посредством пружины 11, шар- ниров 12 и оси 13. Регулируемьй упор 14, смонтированный на основании 1, останавливает движение шарнирно уста новленнЫ механической руки 4 на необходимой рабочей позиции сварки.
Промышленный робот работает следующим образом.
Обе механические руки 3 и 4 устанавливаются над подающими устройствами (не показаны). Затем по заданной программе после захвата деталей поворотная колонна 2 поворачивается с механическими руками 3 и 4 в сторо ; ну рабочих позиций, например, сварки. Угол поворота механической руки
0
5 5
0 S
0
5
4 определяется установкой регулируемого упора 14. Регулируемьй упор 14 устанавливается таким образом, чтобы механическая рука 4 с зажатой в ее захвате 6 деталью оказалась над необходимой рабочей позицией сварки. При останове механической руки 4 поворотная колонна 2 продолжает поворачиваться, преодолевая сопротивление пружины 11 до тех пор, пока механическая рука 3 не окажется над другой рабочей позицией сварки.
После этого поворотная колонна 2 останавливается и происходит технологический процесс (сварка). После окончания сварки захваты 5 и 6 освобождаются от деталей и поворотная колонна 2 совершает обратный поворот к подающим устройствам. Пружина 11 возвращает шарнирно закрепленную механическую руку 4 в исходное положение и цикл повторяется. Необходимая точность установки механической руки 4 обеспечивается регулировкой винтового соединения регулируемого упора 14.
Формула изобретения
Промьшшенный робот, содержащий основание, поворотную колонну и механические руки с захватами, установленные на поворотной колонне, о т- личающийсй тем, что, с целью упрощения конструкции и повы шения позиционирования, он снабжен регулируемьм упором, установленньм на основании, и пружиной, концы которой шарнирно закреплены на механических руках, при этом одна из ме- ханических рук жестко связана с поворотной колонной, а другая механическая рука установлена на ней с возмож- ностыо поворота и взаимодействия с регулируемьм упором.

| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор | 1985 |
|
SU1315299A1 |
| СПОСОБ ЗАХВАТА МЕТАЛЛИЧЕСКИХ ОБЪЕКТОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2020 |
|
RU2746910C1 |
| Промышленный робот | 1985 |
|
SU1281402A1 |
| Механизм поворота руки промышленного робота | 1982 |
|
SU1060464A1 |
| Промышленный робот | 1983 |
|
SU1142270A1 |
| Промышленный робот | 1974 |
|
SU503711A1 |
| Промышленный робот | 1988 |
|
SU1563965A1 |
| Промышленный робот | 1985 |
|
SU1373562A1 |
| ПОВОРОТНЫЙ ПРИВОД ЗВЕНА РЕЗОНАНСНОЙ МЕХАНИЧЕСКОЙ РУКИ | 2003 |
|
RU2271273C2 |
| Модуль промышленного робота | 1981 |
|
SU1016154A1 |
Изобретение относится к машиностроению, а именно к промышленньм роботам для автоматизации технологических процессов загрузки, сборки, сварки и т.д. Целью изобретения является повышение точности позиционирования и упрощение конструкции за счет ликвидации одного из приводов. Промышленный робот содержит основание 1, поворотную колонну 2, установ- ленную на основании 1, и две механические руки 3 и 4, связанные между собой пружиной 11 и закрепленные на поворотной колонне 2. При этом механическая рука 3 жестко установлена на поворотной колонне 2, а механическая рука 4 установлена на ней с возможностью поворота и взаимодействия с регулируемым упором 14. Промьшлен- ный робот позволяет брать заготовки из подающих устройств и устанавливать на рабочие позиции при различных углах между механическими руками 3 и 4. 3 ил. СЛ С 12 Г n-dz ti 74 3-, фиг.1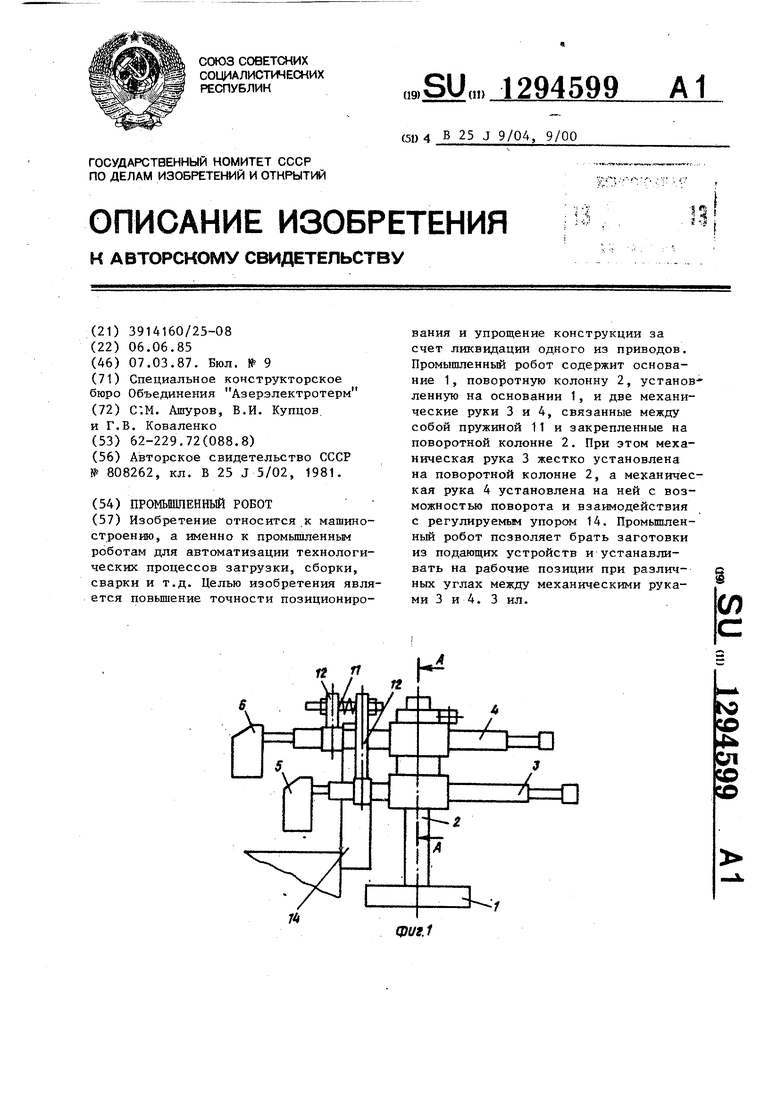
Ж
Редактор Н.Тупица
Составитель А.Ширяева Техред Л.Сердюкова;
Заказ 430/15
Тираж 954 .Подписное
ВНИИПИ Государственного комитета СССР по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
фиг.З
Корректор Е,Рошко
| Промышленный робот | 1977 |
|
SU808262A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
