11
Изобретение относится к робототехнике и может быть использовано для автоматизации вспомогательных процессов в машиностроении при загрузке и разгрузке заготовок.
Цель изобретения - повышение надежности захвата за счет обеспечения возможности самоустановки схвата и повьшение производительности манипулятора за счет позиционирования захваченной заготовки относительно руки манипулятора.
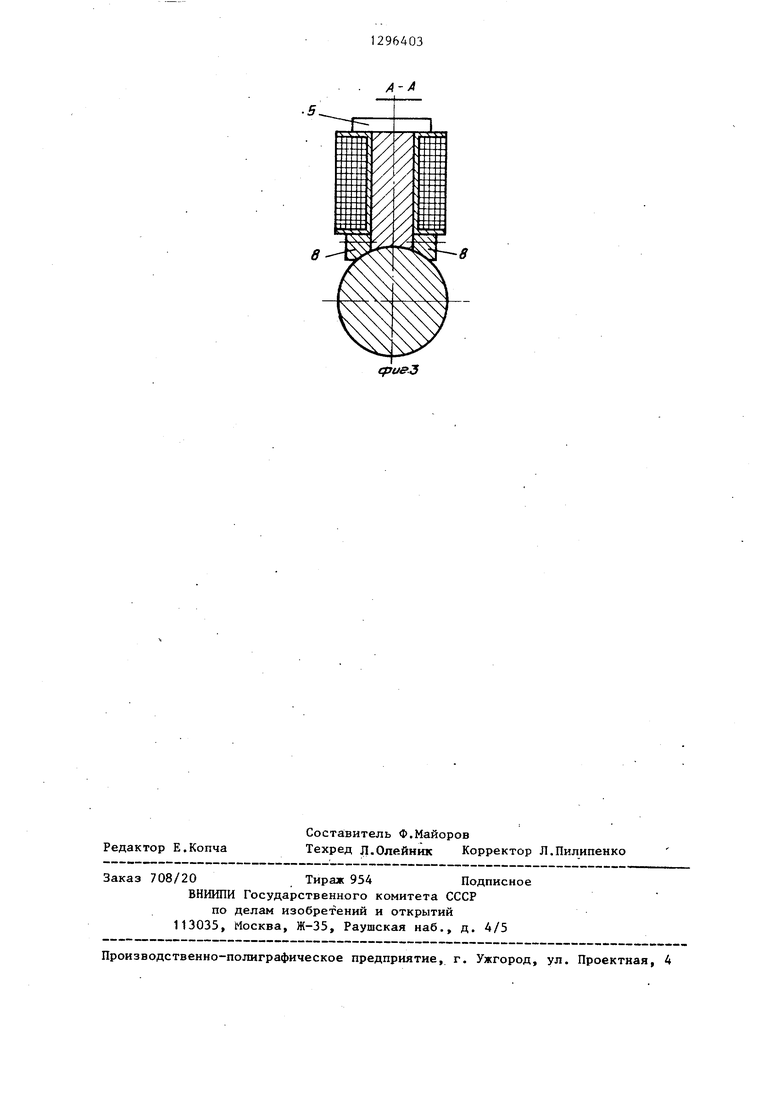
На фиг.1 изображена часть руки манипулятора со схватом; на фиг.2 - электромагниты схватаJ на фиг.З - сечение А-А на фиг.2.
Манипулятор содержит установленную на траверсе (не показана) руку 1 на которой закреплен силовой Г1 дроци линдр 2, шток 3 которого связан с дополнительной пластиной 4, установленной на руке 1 с возможностью продольного перемещения.
На основной пластине 5 закреплены электромагниты 6, при этом основная и дополнительная пластины связаны между собой шарнирами 7. На рабочих поверхностях электромагнитов 6 установлены накладки 8, выполненные из немагнитопроводного материала, напри мер бронзы. Кроме того, на руке 1 закреплен упор 9.
Манипулятор работает следующим образом.
При небольших смещениях электро I магнитов 6 относительно заготовки и ; подключении электромагнитов к источнику напряжения под действием магнитных силовых линий они разворачиваютс вдоль оси заготовок относительно пластины 4. В случае наличия нескольких заготовок разворот происходит в сторону с наименьшим магнитным сопротив
O.
5
6403
2
лением. При этом шток 3 силового гидроцилиндра 2 полностью вьщвинут в направлении захвата.
После опускания схвата и захвата заготовки пластина 4 вместе с электромагнитами 6 под действием гидроцилиндра 2 перемещается в сторону упора 9.
При соприкосновении заготовки с упорами 9 электромагниты 6 продолжают перемещаться в заданное положение, скользя своими накладками 8 по поверхности заготовки. После остановки электромагнитов 6 заготовка укладывается на рабочую позицию, а электромагниты 6 возвращаются в исходное положение .
Изменение положения заготовки на рабочей позиции осуществляется перестановкой упора 9 на новое место.
Формула изобретения
Манипулятор, содержащий руку, установленную на траверсе, и схват, выполненньй в виде электромагнитов, установленных на основной пластине, связанной с рукой, отличающийся тем, что, с целью повышения надежности захвата и повышения производительности, он снабжен закрепленным на руке манипулятора параллельно ее продольной оси силовым цилиндром со штоком, дополнительной пластиной, установленной в направляющих, выполненных на руке манипулятора, и связанной со штоком силового цилиндра, а также накладками, выполненными из немагнитопроводного материала и установленными на рабочих поверхностях электромагнитов, при этом основная и дополнительная пластины шарнирно связаны между собой.
cpuffZ
Редактор Е.Копча
Составитель Ф.Майоров
Техред Л.Олейник Корректор Л.Пилипенко
Заказ 708/20Тираж 954Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, А
сриеЗ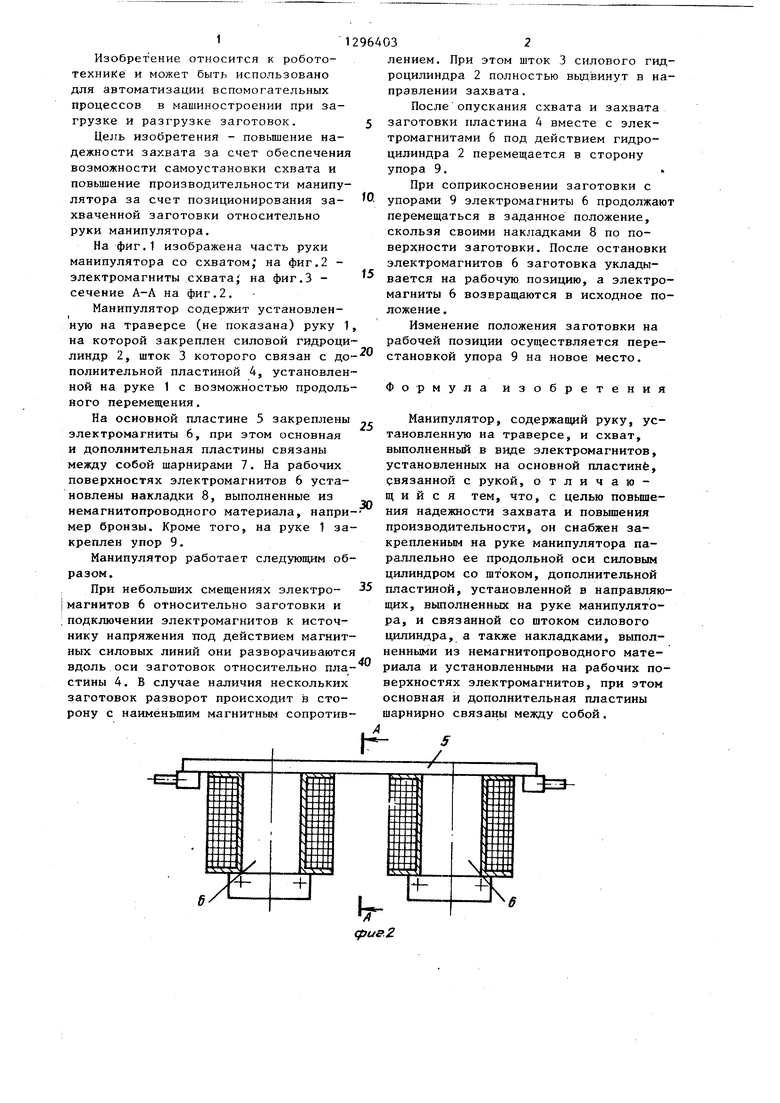
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор | 1980 |
|
SU1166877A1 |
| Автоматическая линия | 1984 |
|
SU1187962A1 |
| Автоматизированная линия для многопереходной штамповки | 1986 |
|
SU1344471A1 |
| Схват манипулятора | 1985 |
|
SU1284832A1 |
| УСТРОЙСТВО ДЛЯ ПОШТУЧНОЙ ВЫДАЧИ ЗАГОТОВОК | 1990 |
|
RU2023572C1 |
| Автоматизированный комплекс для штамповки деталей | 1987 |
|
SU1581436A1 |
| РОБОТИЗИРОВАННЫЙ МАНИПУЛЯТОР | 2003 |
|
RU2243881C2 |
| Манипулятор | 1982 |
|
SU1073086A1 |
| Робот к листоштамповочному прессу | 1988 |
|
SU1542672A1 |
| Схват робота | 1990 |
|
SU1761463A1 |
Изобретение относится к области робототехники и может быть использовано для автоматизации вспомогательных процессов в машиностроении при разгрузке и загрузке заготовок. Целью изобретения является повышение надежности захвата за счет обеспечения самоустановки схвата и повышение производительности манипулятора за счет возможности позиционирования захваченной заготовки относительно руки манипулятора. При включении электромагнитов 6 схвата и опускании их на заготовку происходит самоустановка схвата за счет шарнирной связи между основной 5 и дополнительной 4 пластинами. При этом шток 3 силового гидроцилиндра 2 полностью выдвинут в направлении схвата. После захвата заготовки пластина 4 вместе с электромагнитами 6 под действием гидроцилиндра 2 перемещается в направлении к упору 9. При соприкосновении заготовки с упором 9 электромагниты 6 продолжают перемещаться в заданное положение, скользя своими накладками 8, выполненными из немагнитопровод- ного материала по поверхности головки. Затем заготовка укладывается на рабочую поверхность и цикл повторяется. 3 ил. О) N5 :о 05 о со 9 ( 8
| Автоматический манипулятор с поисковой системой управления | 1982 |
|
SU1024268A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
