Изобретение относится к робототехнике и может быть использовано для захвата и удержания ферромагнитных деталей.
Цель изобретения - расширение технологических возможностей схвата за счет обеспечения возможности захвата деталей с отверстием и без него, а также за счет повышения точности.
На фиг. 1 изображен схват, общий вид; в момент захватывания детали; на фиг. 2 - то же, в момент укладки детали; на фиг. 3 - разрез А-А на фиг. 1.
Схват манипулятора содержит державку 1, в которой установлен с возможностью перемешения полый корпус 2, зафиксированный от проворота шпонкой 3 и подпружиненный пружиной 4, один конец которой упирается в шайбы 5 и 6, установленные на полом корпусе 2, а другой - в державку 1. Полый корпус 2 удерживается в державке 1 шайбой 7.
Внутри полого корпуса 2 размешен блок 8, постоянных магнитов, в котором установлены постоянные магниты 9 и магнитопро- воды 10. Блок 8 подпружинен относительно корпуса 2 пружиной 11, один конец которой упирается в подпятник 12, а дру- гой - в гайку 13.
На корпусе 2 установлена с возможностью перемещения втулка 14, на которую навинчен упор 15, выполненный в виде втулки с конусным отверстием, наименьший диаметр которого соответствует диаметру захватываемой детали 16.
Втулка 14 соединена с блоком 8 постоянных магнитов штифтами 17. Одни концы штифтов 17 жестко соединены с втулкой 14, а другие - с блоком 8 постоянных магнитов. Штифты 17 проходят через продольные пазы 18, выполненные в полом корпусе 2. Длина продольных пазов 18 не меньше величины, равной сумме величин хода полого корпуса 2 и диаметра штифта 17.
Схват манипулятора работает следующим образом.
Детали захватываются из пакета 19 и укладываются на плоскость 20. Для захватывания детали из пакета 19 манипулятор (не показан) осуществляет перемещение вниз державки 1 и полого корпуса 2. При этом деталь 16 входит в упор 15, цент
иг.г ВНИИПИЗаказ 932/19
0
5
0
рируется относительно оси схвата и притягивается к блоку 8 постоянных магнитов, т. е. магнитопроводам 10 постоянных магнитов 9. В таком состоянии деталь переносится к месту укладки ее на плоскость 20.
Для укладки детали также осуществляется движение вниз державки 1 и полого корпуса 2. В какой-то момент времени упор 15 упирается в плоскость 20 и останавливается. Жестко связанный с ним через втулку 14 и штифты 17 блок 8 магнитов также останавливается, а полый корпус 2, продолжая движение вниз, сжимая при этом пружину 11, отрывает деталь 16 от блока 8 магнитов и прижимает ее к плоскости 20. Погрешность хода вниз автоматического манипулятора компенсируется пружиной 4. При подъеме схвата вверх вторичного захватывания детали 16 не происходит, так как зазор между ней и блоком магнитов 8 остается постоянным.
Таким образом, предлагаемое устройство позволяет захватывать и удерживать плоские ферромагнитные детали с отверстием и без него и может быть использовано в качестве схвата, автоматического манипулятора благодаря высокой точности закрепления детали, простоте работы, небольшим габаритам и массе.
Формула изобретения
Схват манипулятора, содержаший державку, полый корпус, установленный в ней с возможностью перемещения и подпружиненный относительно нее, блок постоянных магнитов, размещенный внутри полого корпуса с возможностью перемещения и подпружиненный относительно него, и упор, отличающийся тем, что, с целью расширения технологических возможностей, он снабжен установленной на полом корпусе с возможностью перемещения относительно него втулкой, соединенной с упором, и штифтами, одни концы которых жестко связаны с втулкой, а вторые - с блоком .магнитов, причем штифты размещены в продольных пазах, выполненных в полом корпусе, при этом длина продольных пазов полого корпуса не меньше величины суммы хода полого корпуса и диаметра штифта, а упор выполнен в виде оправки с конусным отверстием.
Тираж 954
аг.З
Подписное
Г1роизводственио-по.пиграфическое предприятие, г. Ужгород, у.п. Проектная. 4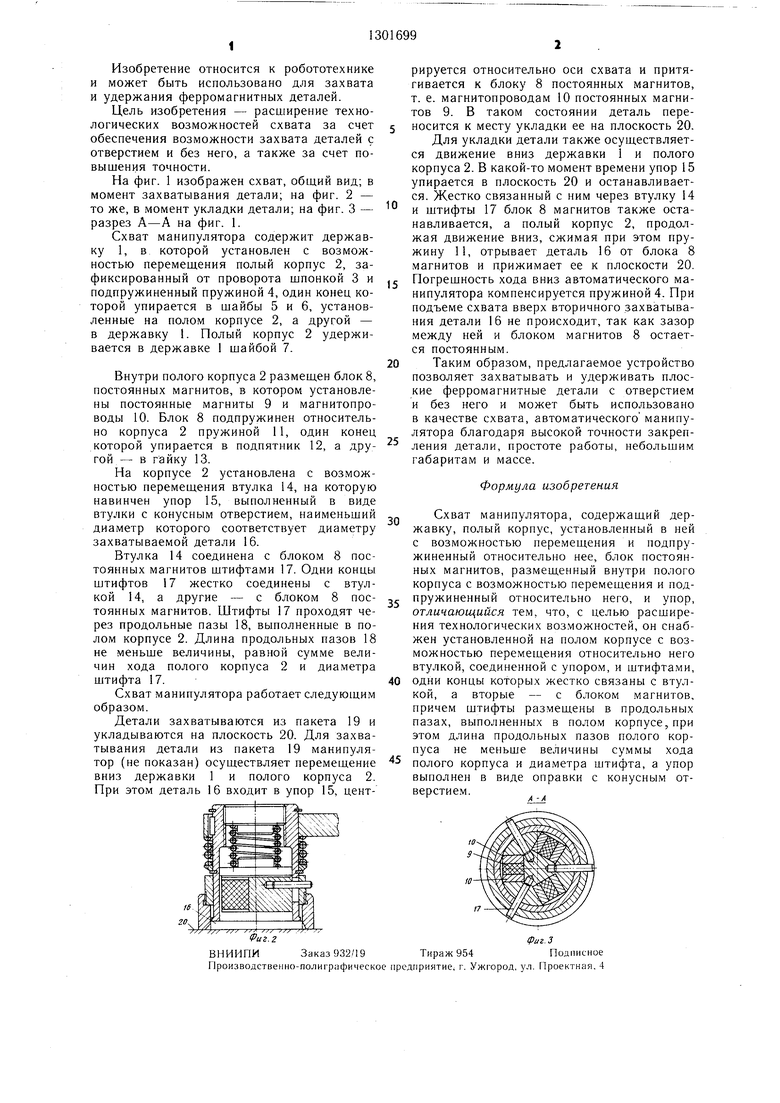
| название | год | авторы | номер документа |
|---|---|---|---|
| Захват для деталей с отверстиями | 1979 |
|
SU870112A1 |
| Схват манипулятора | 1986 |
|
SU1445951A1 |
| Групповой схват | 1986 |
|
SU1333576A1 |
| Автоматическая линия для многопереходной штамповки | 1987 |
|
SU1565563A1 |
| Групповой схват промышленного робота | 1988 |
|
SU1535714A1 |
| Схват робота | 1990 |
|
SU1761463A1 |
| Промышленный робот | 1977 |
|
SU738864A1 |
| Кистевой узел манипулятора | 1990 |
|
SU1712142A1 |
| Схват манипулятора | 1983 |
|
SU1057273A1 |
| Схват манипулятора | 1983 |
|
SU1096098A1 |
Изобретение относится к .робототехнике и позволяет расширить технологические возможности схвата манипулятора за счет повышения точности закрепления деталей, уменьшения габаритов и массы схвата. При движении вниз державки 1 и полого корпуса 2 захватываемая деталь 16 входит в упор 15, центрируется и притягивается к блоку постоянных магнитов. Для укладки захватываемой детали 16 осуществляют дальнейшее движение державки 1 и полого корпуса 2 вниз. Упор 15 останавливается вместе с жесткосвязанным с ним через втулку 14 и штифты 17 блоком 8 магнитов, а полый корпус 2 продолжает движение. Сжимая пружину 11, полый корпус 2 открывает захватываемую деталь 16 от блока магнитов и прижимает ее к плоскости, на которую она укладывается. 3 ил. 13 2 00 о Oi со СО Фиг. 1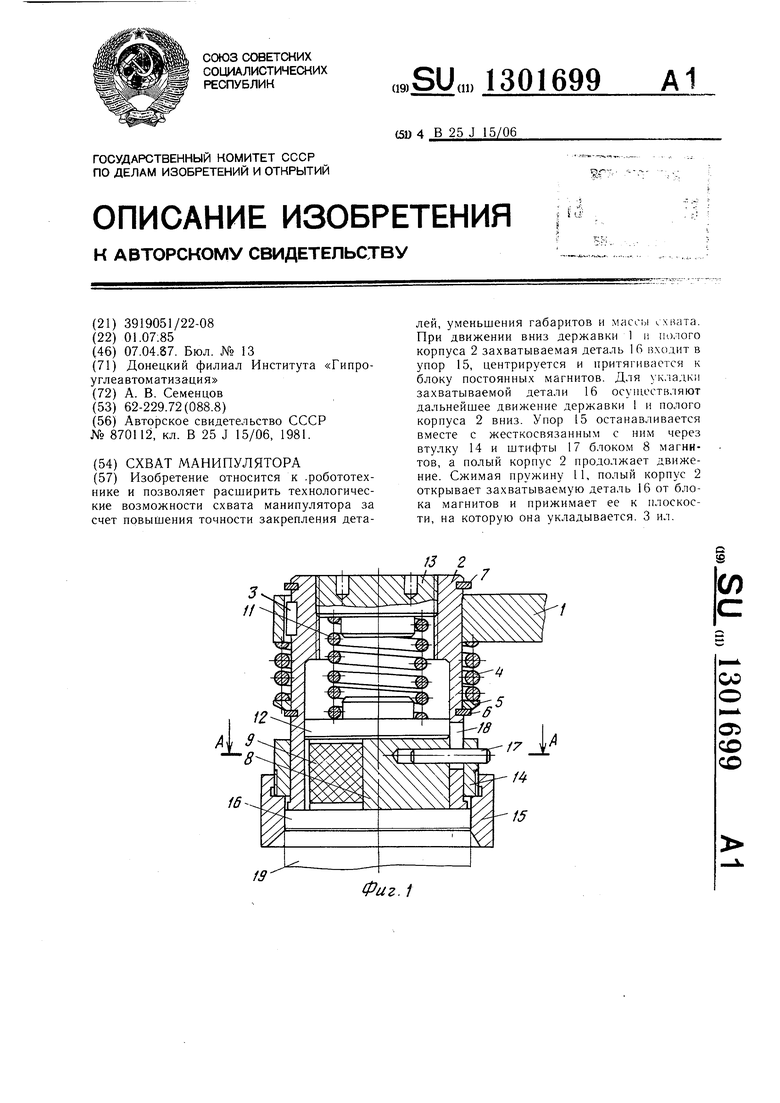
| Захват для деталей с отверстиями | 1979 |
|
SU870112A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
