1
130
Изобретение относится к оборудованию для гальванотехники и может быть использовано для управления транспортным механизмом как обычной гальванической линии, так и линии, включенной в систему ГАП гальваники.
Цель изобретения - повышение точности позиционирования,
На чертеже приведена функциональная схема устройства управления автооператорами линий гальванопокрытий.
Устройство управления состоит из пульта 1 управления, блока 2 программ, блока 3 датчиков верхнего и
нижнего положений автооператора, бло- J5 оператора нумеруются. Перед началом
ка 4 вьздержек времени, блока 5 управления, блока 6 подсчета зубьев рейки, дешифратора 7 позиций, дешифратора 8 команды переключения скорости, дешифратора 9 команды отключения двигателя и включения тормозного устройства.
Выходы пульта 1 управления связаны с блоком 2 программы, блоком 6 подсчета зубьев рейки, первыми входами дешифратора 7 позиций, дешифратора 8 команды переключения скорости к дешифратора 9 команды отключения Двигателя и включения тормозного устройства. Вторые входы указанных дешифраторов связаны с выходом блока 6 подсчета зубьев рейки.Входы блока 5 управления соединены с первым выходом блока 2 программ непосредствен- но, с вторым выходом блока 2 программ через блок 4 выдержек времени, с выходом дешифратора 8 команды переключения скорости и выходом дешифратора 9 команды отключения двигателя и включения тормозного устройства. Входы блока 2 программ соединены с блоком 3 датчиков верхнего и нижнего положений автооператора, дешифратором 7 позиций и пультом 1 управления.
Пульт 1 управления содержит набор клавиш, при помощи которых в дешифраторы вводятся коды номеров зубьев, а также кнопки выбора номера
работы в (ПЗУ) дешифратора 7 позиций оператор с пульта управления вводит коды номеров зубьев, напротив которых должен остановиться автооператор
20 в ПЗУ дешифратора 8 команды переклю-г- чения скорости записывает коды номеров зубьев, напротив которых автооператор должен изменить скорость, в ПЗУ дешифратора 9 команды отключения
25 двигателя и включения тормозного уст ройства записывает коды номеров зубьев, при достижении которых необходимо отключить скорость и включить тормозное устройство. Автооператор
30 устанавливается на, исходную позицию. При нажатии кнопки Пуск на пульте управления в блок 6 подсчета зубьев рейки вводится код номера зуба исход ной позиции, а в блоке 2 программ вы
j бирается необходимая программа обработки. Команды управления двигателя автооператоров последовательно выбираются из блока 2 программ и поступа ют в блок 5 управления. Выборка каж40 Дой последующей команды управления осуществляется по сигналам с блока 3 датчиков верхнего и нижнего положени автооператора или с дешифратора 7 позиций. Временные интервалы формиру
45 ются при помощи блока 4 вьщержек вре мени. При перемещении подвесок с деталями вперед по линии в режиме ра бочего хода, а также движении автооператора назад без деталей в режиме
программы обработки и кнопки управле- 0 холостого хода блок 6 автоматически
ния гальванической линией. Блок 2 программ представляет собой совокупность адресуемых ячеек памяти. Блок 3 датчиков верхнего и нижнего положений автооператора расположен на транспортном механизме. Блок 4 вьщержек времени представляет собой управляемый кодом счетчик времени. Блок 5 управления преобразует команды управопределяет номер зуба, который прохо дит автооператор. Код номера зуба поступает на дешифратор, который сра нивает его с кодом, хранящимся в пам 55 мяти и при совпадении кодов формируе соответствующий сигнал.
Пусть автооператор выполняет рабочий ход. При срабатывании дешифра1305202
ления в сигналы управления двигатег лями автооператоров. Блок 6 подсчета зубьев рейки выполнен в виде датчика прохождения зуба, расположенного на автооператоре, и реверсивного счетчика.
Дешифраторы 7-9 состоят из постоянных запоминающих устройств ПЗУ и схем совпадения. Данные в ПЗУ заносятся до начала работы с пульта управления .
Устройство работает следующим образом.
Все зубья направляющей рейки автооператора нумеруются. Перед началом
работы в (ПЗУ) дешифратора 7 позиций оператор с пульта управления вводит коды номеров зубьев, напротив которых должен остановиться автооператор,
20 в ПЗУ дешифратора 8 команды переклю-г- чения скорости записывает коды номеров зубьев, напротив которых автооператор должен изменить скорость, в ПЗУ дешифратора 9 команды отключения
25 двигателя и включения тормозного устройства записывает коды номеров зубьев, при достижении которых необходимо отключить скорость и включить тормозное устройство. Автооператор
30 устанавливается на, исходную позицию. При нажатии кнопки Пуск на пульте управления в блок 6 подсчета зубьев рейки вводится код номера зуба исходной позиции, а в блоке 2 программ выj бирается необходимая программа обработки. Команды управления двигателя автооператоров последовательно выбираются из блока 2 программ и поступают в блок 5 управления. Выборка каж40 Дой последующей команды управления осуществляется по сигналам с блока 3 датчиков верхнего и нижнего положений автооператора или с дешифратора 7 позиций. Временные интервалы формиру45 ются при помощи блока 4 вьщержек времени. При перемещении подвесок с деталями вперед по линии в режиме рабочего хода, а также движении автооператора назад без деталей в режиме
определяет номер зуба, который проходит автооператор. Код номера зуба поступает на дешифратор, который сравнивает его с кодом, хранящимся в пам 55 мяти и при совпадении кодов формирует соответствующий сигнал.
Пусть автооператор выполняет рабочий ход. При срабатывании дешифра313
тора 8 команды переключения скорости на вход блока 5 управления поступает сигнал, по которому автооператор уменьшает скорость. При срабатывании дешифратора 9 на вход блока 5 управления поступает другой сигнал, по которому отключается двигатель. Одновременно по этому сигналу включается тормозное устройство. Пройдя некоторый тормозной путь, автооператор останавливается на заданной позиции. При этом срабатывает дешифратор 7 позиции, по сигналу с которого осуществляется выборка очередной команды.
Использование блока подсчета зу- бьев рейки, дешифратора позиций, дешифратора команды переключения скорости и дешифратора команды отключения двигателя и включения тормозного, устройства отличает предлагаемое устройство от известного. Подсчет зубьев направляющей рейки автооператора позволяет формировать дополнительные команды управления без введения дополнительных датчиков и изменения технологической программы.
Использование дополнительной команды переключения скорости и фиксированного упреждения на подаче команды торможения позволяет повысить точность позиционирования, что снижает вероятность появления сбоев в работе гальванической линии.
Редактор С. Патрушева Заказ 1385/22
Составитель С. Пономарев
Техред Л.Олейник Корректор Е. Рошко
Тираж 613
Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, т. Ужгород, ул. Проектная, 4
Формула изобретения Устройство управления автоопера- торами линий гальванопокрытий, содержащее пульт Управления, блок программ, блок выдержек времени, блок управления и блок датчиков верхнего и нижнего положений автооператора, отличающееся тем, что, с целью повышения точности позиционирования, оно снабжено блоком подсчета зубьев рейки, дешифратором позиций, дешифратором команды переключения скорости и дешифратором команды отключения двигателя и включения
тормозного устройства, причем первые входы дешифраторов позиций, команды переключения скорости и комаН ды отключения двигателя и включения тормозного устройства связаны с пер вым выходом пульта управления, вторые входы дешифраторов соединены с выходом блока подсчета числа зубьев, вход которого связан с вторым выходом пульта управления,, выходы дешифраторов команды переключения скорости и команды отключения двигателя и включения тормозного устройства соединены с входами блока управления, а другие входы соединены с первым входом блока программ и выходом блока выдержек времени, вход которого связан с вторым выходом блока программ, а входы блока программ соединены с пультом управления, блоком датчиков верхнего и нижнего положений автооператора и дешифратором позиций.
Подписное
| название | год | авторы | номер документа |
|---|---|---|---|
| Командоаппарат для управления линией гальванопокрытий | 1986 |
|
SU1397553A1 |
| Командоаппарат для управления гальванической линией | 1986 |
|
SU1388470A1 |
| Устройство программного управления автооператорами гальванической линии | 1981 |
|
SU969794A1 |
| Устройство управления транспортными механизмами гальванической линии | 1986 |
|
SU1375689A1 |
| Устройство для программного управления автооператорами гальванической линии | 1987 |
|
SU1429089A1 |
| СИСТЕМА УПРАВЛЕНИЯ ДВИЖЕНИЕМ ПАССАЖИРСКОГО ЭЛЕКТРОВОЗА | 2004 |
|
RU2273567C1 |
| СИСТЕМА УПРАВЛЕНИЯ ДВИЖЕНИЕМ ЭЛЕКТРОПОЕЗДА | 2002 |
|
RU2213669C1 |
| Устройство программного управления линией гальванопокрытий | 1985 |
|
SU1339169A1 |
| Устройство для управления автоматическими линиями | 1990 |
|
SU1805448A1 |
| Устройство для программного управления | 1982 |
|
SU1067470A1 |
Изобретение относится к оборудованию для гальванотехники и может быть использовано для управления транспортным механизмом гальваничесл дбигателян y tf1OQftCfXi IfVpOC кой линии. Цель изобретения - повышение точности позиционирования. Пер вые входы дешифраторов 7-9 связаны с первым выходом пульта 1 управления, вторые входы дешифраторов 7-9 соединены с выходом блока 6 подсчета зубьев, выход которого связан с вторым выходом пульта 1 управления. Выходы дешифраторов 8 и 9 связаны с блоком 5 управления, на другие входы которого поступают сигналы с первого выхода блока 2 программ и выхода блока 4 вьщержек времени. Повышение точности позиционирования достигается введением в устройство блока подсчета зубьев рейки, дешифратора позиций, дет шифратора команды переключения скорости и дешифратора отключения двигателя и включения тормозного устройства. 1 ил. I (Л со СП 1С IND к тортознам/ устройству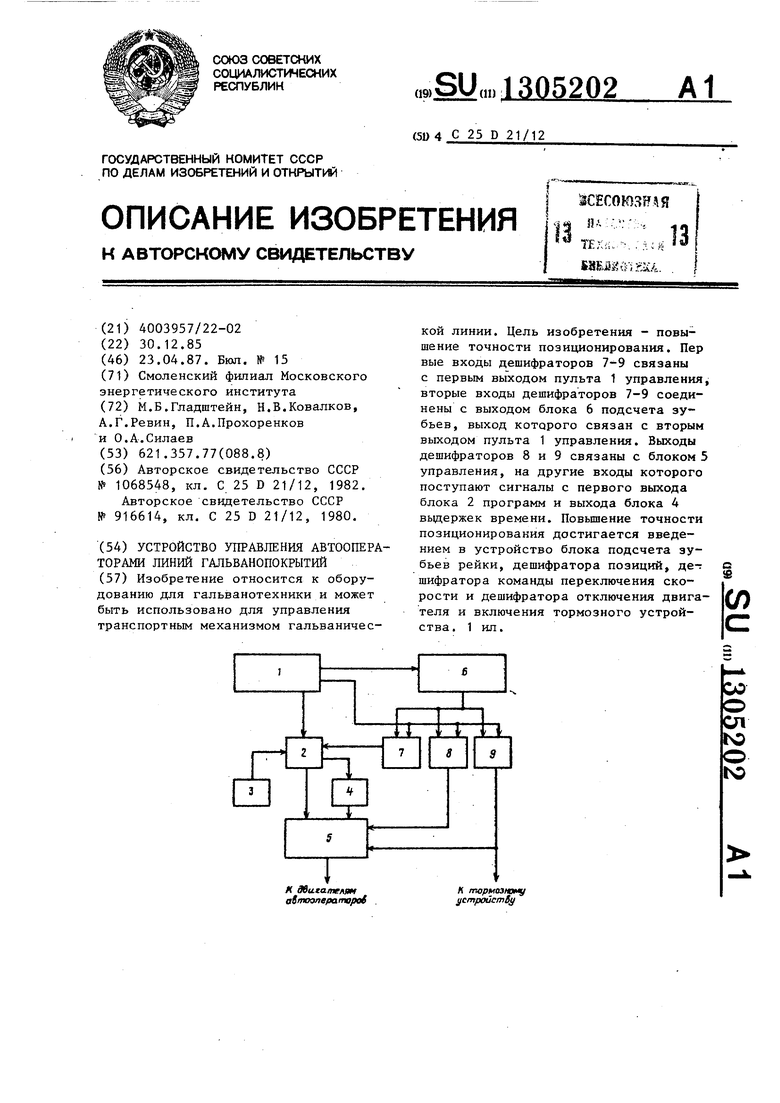
| Устройство для определения порядковых номеров ванн гальваноавтомата | 1982 |
|
SU1068548A2 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
| Авторское свидетельство СССР № 916614, кл | |||
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
