Изобретение относится к гальванотехнике и может быть использовано для управления автооператорами как обычной гальванической линии так и линии включенной в состав гибких автоматизированных производств.
Цель изобретеиия i повьшение надежности работы.
На чертеже приведена функциональ- ная схема комаидоаппарата для управления гальванической линией.
Командоаппарат состоит из следующих блоков по числу автооператоров: блоков программы 1.1-1,п, блоков пу- тевых датчиков 2.1-2.П, блоков управ Ленин 3.1-З.п, датчиков зуба направляющей рейки 4о1-4.п, счетчиками эубьев 5.1-5.п, блоков сравнения 6.1- 6.П, блоков реверса 7о1-7.п. и общих для всего командоаппарата блока анализа вьтолнения программ 8 и пульта управления 9.
Каждый блок программ Ijl-l.n соединен с соответствующими ему блоком путевых датчиков 2,1-2.п, блоком реверса 7.1-7.П, счетчиком зубьев 5.1-5.П и блоком сравнения 6.1-б.п, а также с блоком анализа выполнения программ 8 и пультом управления 9. блок сравнения 6.1-б.п свя- ёан с соответствующими ему счетчиком зубьев 5.1-5.П и блоком реверса 7.1- 7.П с блоком анализа выполнения программ 8. Выход блока реверса 7.1- 7.П соединен с входом блока управления 3.1-З.п, а датчик зуба 4.1-4.П связан со счетчиком зубьев 5.1-5.п.
Клоки 1.1-1.П программ представляют собой совокупность адресуемых ячеек памяти микропроцессорного устройства, в которых хранятся коды команд управления. г
Блоки 2.1-2.п путевых датчиков представляют собой совокупность гер конов, установленных на ваннах: и герконов верхнего и нижнего положений автооператора.
Блоки 3,1-З.п образуют код команды в сигнал управления двигателями автооператора.
Блоки 4.1-4.П датчика зуба представляют собой оптронный датчик, установленный на автооператоре.
Счетчики зубьев 5.1-З.п позволя- ют сравнивать коды и вьщавать сигналы Больше, Меньше.
Блоки 7.1-7.П реверса позволяют аннулировать команду Стоп и формиг
ровать команды Вперед и Назад пр цоступлении сигналов Меньше и Болше с блока сравнения 6.1-б.п.
Блок 8 разрешает одновременное вьшолнение всеми автооператорами очередного участка программы при поступлении синхрокоманд, завершающих каждый участок программы, со всех блоков программ 1.1-l.n, а также сигналов со всех блоков сравнения 6.1-6.а, подтверждающих соответствие истинного положения автооператора положению, предусмотренному программой.
Пульт 9 управления содержит набор клавиш, при помощи которых в блок программ осуществляется ввод номера программы обработки.
Командоаппарат работает следующим образом.
Все зубья направляющей рейки автооператора нумеруются. Каждому номеру позиции соответствует свой номер зуба, который хранится в блоке програм Перед началом работы все транспортные механизмы устанавливаются в ис- ходное положение.. Оператор,.установив детали на позицию загрузки, нажимает клавишу номера программы обработки на пульте 9 управления. При этом из блока J.1 программ извлекается код команды управления, который через блок реверса 7.1 передается в блок 3.1 управления. При зтом, начинается движение транспортного механизма. Одновременно с датчика зуба 4.1 начинают постзтать сигналы на реверсивный счетчик зубьев 5.1. По команде Вперед, поступающей на счетчик зубьев 5.1 с блока 1.1 программ, содержимое счетчика при движении автооператора увеличивается. При движении назад содержимое счетчика уменьшается. Рассмотрим операцию останова автооператора. Пусть автооператор движется в верхнем положении вперед. При срабатьшании необходимого путевого датчика 2.1 из блока программ 1.1 выбирается команда Стоп и через блок реверса 7.1 передается в блок управления 3.1 Автооператор останавливается. Затем в блоке 6.1 производится(Сравнение кодов номера зуба, поступающего из блока программ 1.1 и из счетчика зубьев 5.1. Если коды совпадают, из блока 6.1 сравнения в блок программ 1.1 поступает сигнал, по которому осуществляется
выборка очередной команды управления Пуск вниз. не совпадают, то выполнение очередной команды задерживается. Пусть число, записанное в счетчике зубьев 5.1 оказалос больше. Это значит, что вследствие некоторых причин, например износа тормозной системы, загрязнения тормозных колодок и так далее, автооператор проехал заданную позицию. В этом случае,в блоке реверса 7.1 по сигналу Больше, поступающему из блока сравнения 6.1 команда Стоп отменяется, формируется команда Назад с пониженной скоростью. Как только число в счетчике 5.1 зубьев совпадает с номером зуба данной позиции, команда Стоп снова поступит на блок 3.1 управления, транспортны механизм остановится и выполнение технологической программы продолжится. Аналогично производится останов автооператора при движении назад. При выборке из блока 1.1 программ синхрокоманды также производится распознавание истинного положения автооператора путем сравнения кодов, поступаюпщк в блок сравнения 6.I из счетчика 5.1 и блока программ 1.1 Вьтолнение очередного участка технологической программы начинается одновременно по си гналам, поступающим с блока 8 анализа выполнения программы на блоки 1.1-1.П и .только в .том случае, если на блок 8 постзшили синхросигналы со всех блоков программ 1.1 -1.П и сигналы подтверждения синхронизации с блоков 6,-в.п, что также обеспечивает контроль правильности выполнения программы.
0
5
0
5
0
5
0
Использование датчиков зуба направляющей рейки, счетчиков зубьев, блоков сравнения и блоков реверса отличает предлагаемый командоаппарат от известного. Контроль истинного положения автооператора, осуществляемый путем подсчета числа зубьев направляющей рейки, позволяет загружать ванны и извлекать из них детали только в том , если номер зуба рейки соответствует номеру позиции, осуществлять при необходимости реверс хода ,при проезде нужной позиции, а также производить контроль выполнения технологической программы, что дает возможность повысить надежность работы командоаппарата.
Формула изобретения
Командоаппарат для управления гальванической линией, содержа1чий по числу автооператоров блоки программ, блоки путевых датчиков, блоки управления, общие для всего командо- аппарата блок анализа вьтолнения программ и пульт управления, отличающийся тем, что, с целью повыщения надежности работы, он снабжен по числу автооператоров датчиками зуба направляющей рейки, счетчиками зубьев, блоками сравнения и блоком реверса, причем блок сравнения связан с блоком программ, блоком реверса, блоком анализа выполнения программ и счетчиком зубьев, который соединен также с блоком программ и датчиком зуба направляющей рейки, а блок реверса связан с блоком- программ и блоком управления.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство программного управления линией гальванопокрытий | 1985 |
|
SU1339169A1 |
| Устройство управления транспортными механизмами гальванической линии | 1986 |
|
SU1375689A1 |
| Система программного управления гальванической линией | 1986 |
|
SU1399382A1 |
| Устройство управления гальванической линией | 1986 |
|
SU1388469A1 |
| Командоаппарат для управления линией гальванопокрытий | 1986 |
|
SU1397553A1 |
| Устройство управления автооператорами линий гальванопокрытий | 1985 |
|
SU1305202A1 |
| Многоканальная микропрограммная управляющая система | 1985 |
|
SU1280628A1 |
| ТЕСТЕР УРОВНЯ ИННОВАЦИОННОГО ИНТЕЛЛЕКТА ЛИЧНОСТИ | 2013 |
|
RU2522992C1 |
| УСТРОЙСТВО ОПРЕДЕЛЕНИЯ РОЛЕВОЙ ФУНКЦИИ УЧАСТНИКА ТВОРЧЕСКОГО КОЛЛЕКТИВА | 2013 |
|
RU2541431C1 |
| Устройство программного управления роботами гальванической линии | 1983 |
|
SU1124250A1 |
Изобретение относится к гальванотехнике и может быть использовано для управления автооператорами. Цель изобретения - повышение надежности. Блок программ 1 соединен с блоком путевых датчиков 2, блоком реверса 7, счетчиком зубьев 5 и блоком сравнения 6, а также с блоком анализа выполнения программ 8 и пультом управления 9. Клок сравнения 6 связан с соответствующими ему счетчиком зубьев 5, блоком реверса 7 и блоком анализа выполнения программ 8. Выход блока реверса 7 соединен с входом блока управления 3, а датчик зуба 4 связан со счетчиком зубьев 5. Повышение на- . дежности достигается введением датчиков зуба направлякадей рейки, счетчи-. ков зубьев, блоков сравнения и бло- ков реверса. I ил« с (Л со 00 00 4 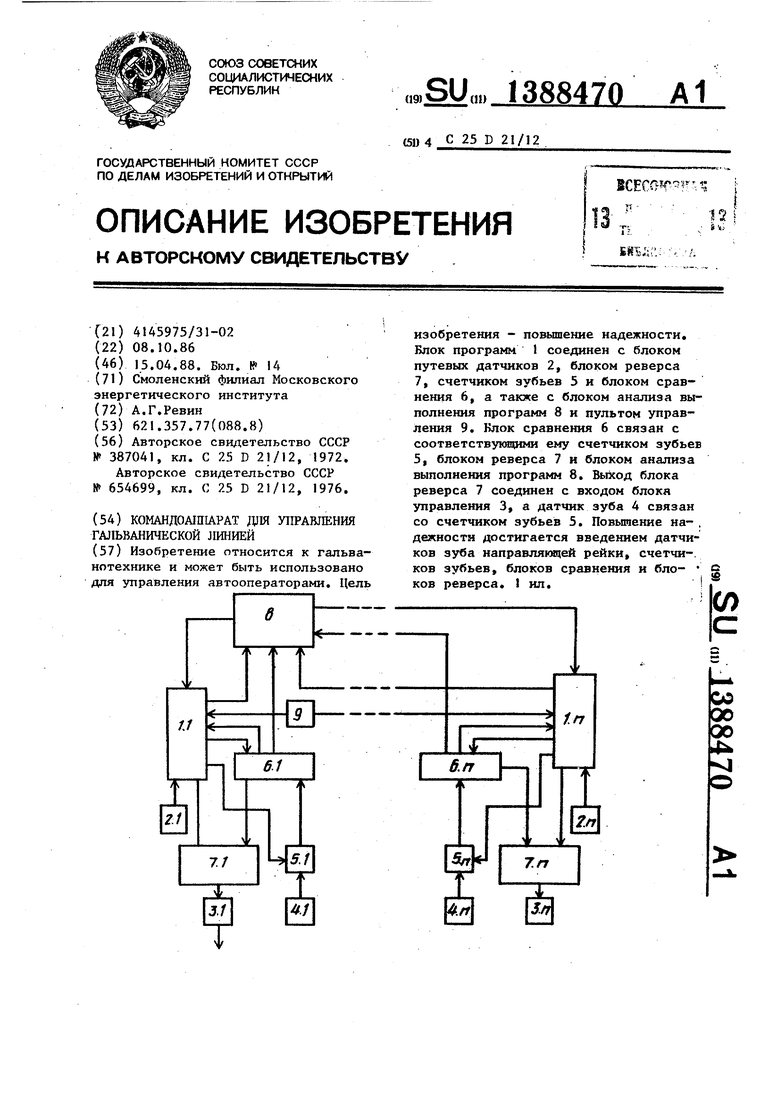
| УСТРОЙСТВО УПРАВЛЕНИЯ АВТООПЕРАТОРАМИ АВТОМАТИЧЕСКИХ ЛИНИЙ ГАЛЬВАНОПОКРЫТИЙ | 0 |
|
SU387041A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
| Устройство программного управления автооператорами гальванической линии | 1976 |
|
SU654699A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
