г к Зймателм aSmeofKfamojta
ОС
ее ел
СП
со
К tnopm 3 torvi empoucmti/
Изобретение относится к оборудова- Hi-uo для гальванотехники и может быть использовано для управления транспортным механизмом гальванолинии.
Цель изобретения - повышение надежности.
На чертеже приведена функциональная схема командоаппарата для управления линией гальванопокрытий.
Командоаппарат содержит пульт 1 управления, блок 2 датчиков верхнего и нижнего положений автооператора, блок 3 программ, блок 4 вьщержек времени, дешифратор 5 команды отключения двигателя и включения тормозного устройства, блок :6 управления, датчик 7 Зуба грубого отсчета, счетчик 8, но ниусные датчики 9 зуба, коммутатор 0-, аналого-цифровой преобразов атель 11, зьщислительное устройство 12, ре- регистр 13 точного отсчета, регистр 14 позиции и блок 15 определения ошибки позиционирования.
Входы блока 3 программ соединены С пультом 1 управления, блоком 2 дат- Чиков верхнего и нижнего положений автооператора и блоком 15 определения ошибки позиционирования. Выходы блока 3 программ связаны.с блоком 15 определения ошибки позиционирования, блоком 4 выдержек времени, дешифратором 5 команды отключения двигателя и включения тормозного устройства и с блоком 6 управления, который также соединен с блоком 4 выдержек времени и депшфратором 5.- Первый вход счетчика 8 связан с пультом 1 управления, йторой вход - с датчиком 7 зуба грубого отсчета, а выход счетчика 8 соединен с регистром 14 позиции. Выходы нониусных датчиков 9.1-9.П зуба через коммутатор 10 и аналого-цифровой преобразователь 11 связаны с вычислительным устройством 12, первый выход которого соединен с коммутатором 10, второй - с блоком 15 определения ошибки позиционирования, третий выход - с регистром 13 точного отсчета, один из выходов которого связан с вычислительным устройством 12, а другой - с регистром 14 позиции. Первый выход последнего соединен с дешифратором 5 команды отключения двигателя и Включения тормозного устройства, а второй - с блоком 15 определения ошибки позиционирования, который связан также с пультом 1 управления.
0
5
0
5
0
5
0
5
0
5
Пульт 1 управления содержит набор кла.виш, при помош,и которых в блок программ вводятся коды номеров зубьев, а также кнопки набора номера программы обработки и кнопки управления гальванической линией. Блок 2 i датчиков верхнего и нижнего положений автооператора расположен на транспортном механизме. Блок 3 программ представляет собой микропроцессорное устройство. Блок 4 вьщержек времени выполнен в виде управляемого кодом счетчика времени.
Дешифратор 5 команды отключения двигателя и включения тормозного устройства состоит из ячеек памяти и схем совпадения. Данные в ячейки памяти заносятся в процессе работы из блока 3 программ. Блок 6 управления преобразует команды управления в сигналы управления двигателями.автооператора. Датчик 7 зуба грубого отсчета выполнен в виде оптического датчика, установленного на автооператоре. Счетчик 8 представляет собой интегральный реверсивный счетчик импульсов с установочными входами. Нониус- ные датчики 9 зуба выполнены в виде оптических датчиков и установлены на автооператоре с шагом, равным 1/9 шага зуба направляюш;ей рейки автооператора. Коммутатор 10 представляет собой интегральный коммутатор аналоговых сигналов.
Интегральный аналого-цифровой преобразователь 11 предназначен для связи коммута тора 10 с вычислительным ;устройством 12. Последнее выполнено 1на базе микропроцессора. Регистр 13 |точного отсчета и регистр 14 позиции представляют собой интегральные регистры промежуточного хранения данных. Блок 15 определения ошибки позиционирования выполнен в виде цифрового вычислительного устройства.
Командоаппарат работает следующим образом.
Все зубья направляющей рейки автооператора нумеруются. Перед началом работы с пульта 1 управления в блок 3 программ вводятся коды номеров зубьев, напротив которых автооператор должен отключить двигатель, а также коды номеров зубьев, напротив которых автооператор должен остановиться.
Последний устанавливается на исходную позицию. При нажатии кнопки Пуск с пульта 1 управления в счет31397553
чик 8 вводится код номера зуба исход- н контрольного кода, поступающего с ной позиции, а в блоке 3 программ вы- блока 3 программ, рассчитывается ошиб- бирается необходимая программа обра- ка позиционирования. Если рассчитан- ботки. При движении автооператора пая ошибка не превьгагает допустимую, вперед содержимое счетчика увеличи- то на блок 3 программ подается сиг- вается, а при движении назад уменьша- нал, по которому выбирается очередная ется. Команды управления двигателями комавда управления. Если ошибка пре- автооператора последовательно выбира- вышает допустимую, на пульт 1 управ- ются из блока 3 программ и поступают -JQ ления поступает сигнал о неисправнос- в блок 6 управления. Выборка очеред- ти тормозной системы, и дальнейшее ной команды осуществляется по сигна- выполнение программы прекращается, лам с блока 2 датчиков верхнего и Использование нониусных датчиков нижнего положений автооператора или зуба, коммутатора, аналого-цифрового с блока 15 определения ошибки позици- 15 преобразователя, вычислительного уст- онйрования. Временные интервалы фор- ройства, регистра точного отсчета, мируются при помощи блока 4 вьщержек регистра позиции и блока определения времени. После подачи очередной ко- ошибки позиционирования отличают пред- манды управления из блока 3 программ лагаемый командоаппарат от известного. в ячейки памяти дешифратора 5 команды 20 Контроль точного положения автоотключения двигателя и включения тор- оператора позволяет определить полную мозного устройства вводится код номе- остановку автооператора, а также рас- ра зуба, куда также поступает информа- считать ощибку позихшонирования, что цияс регистра 14 позиции. При совпаде- позволяет обнаружить неисправности НИИ кодов сформирован соответствукнций 25 тормозной системы автооператора и сигнал, по которому автооператор на- предотвратить сбои в работе гальвани- чинает торможение. ческой линии.
Далее рассмотрим, как осуществля- .
ется контроль полной остановки авто- -Формула изобретения оператора и определяется ошибка пози-зс
ционирования. Вычислительное устрой- Командоаппарат для управления ли- ство 12 через коммутатор 10 и анало- нией гальвайопокрытий, содержащий го-цифровой преобразователь 11 пооче- пульт управления, блок датчиков верх- редно опрашивает нониусные датчики 9 него и нижнего положений, блок про- зуба и определяет номер датчика, име- - грамм, блок вьщержек времени, дешиф- ющего максимальный выходной сигнал. .. ратор команды отключения двигателя Этот номер датчика представляет собой и включения тормозного устройства, точную цифру отсчета пройденного рас- блок управления, датчик зуба грубого стояния, которая помещается в регис1гр отсчета и счетчик, о т л и ч а to - 13. точного отсчета. В старшие разря Q щ и и с я тем, что, с целью повьппе- ды регистра 14 позиции поступают дан- ния надежности, он снабжен нониусными ные 6о счетчика 8, а в младшие - из датчиками зуба, коммутатором, анало- регистра 13 точного отсчета. Таким го-цифровым преобразователем, вычис-- образом, в регистре 14 позиций форми- лительным устройством, регистром точ- руется код точного положения автоопе- дд ного отсчета, регистром позиции и ратора, поступающий в блок 15 опреде- блоком определения ошибки позициони- ления ошибки позиционирования. рования, причем выход-ы нониусных датВычислительное устройство 12 после чиков зуба через коммутатор и анапо- каждо1 о цикла опроса нониусных датчи- го-цифровой преобразователь связаны ков 9 сравнивает текущий номер датчи- с вычислительным устройством, первый ка с номером, рассчитанным в предьщу- выход которого соединен с коммутато- щем цикле и хранящимся в регистре 13 РОМ, второй - с блоком определения точного отсчета. 11сли номера совпада- ошибки позиционирования, третий - с ют, что свидетельствует о полной. ос :.регистром точного отсчета, первый вы- тановке автооператора, вычислительное ее ° последнего связан с регистром по- устройство 12 вьщает сигнал разреше- зиции, второй - с вычислительным уст- ния на блок 15, где на основании кода ройством, второй вход регистра пози- фактического положения автооператора, ции соединен со счетчиком, первый вы- поступающего с регистра 14 позипиил ход регистра позиции связан с дешиф513975536
ратором команды отключения двигателя позиционирования, который соединен и включения тормозного устройства, также с блоком программ и пультом уп- второй - с блоком определения ошибки равления.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство управления автооператорами линий гальванопокрытий | 1985 |
|
SU1305202A1 |
| Устройство программного управления автооператорами гальванической линии | 1981 |
|
SU969794A1 |
| Устройство для программного управления автооператорами гальванической линии | 1987 |
|
SU1429089A1 |
| Устройство программного управления линией гальванопокрытий | 1985 |
|
SU1339169A1 |
| Устройство управления транспортными механизмами гальванической линии | 1986 |
|
SU1375689A1 |
| Устройство программного управления автооператорами гальванической линии | 1980 |
|
SU943337A1 |
| Командоаппарат для управления гальванической линией | 1986 |
|
SU1388470A1 |
| Устройство для управления автооператором химико-гальванической линии | 1981 |
|
SU966667A1 |
| Устройство программного управления автооператорами гальванической линии | 1976 |
|
SU654699A1 |
| Устройство программного управления роботами гальванической линии | 1983 |
|
SU1124250A1 |
Изобретение относится к оборудованию для гальванотехники . и может быть использовано для управления транспортным механизмом гальванолинии. Цель изобретения - повьппение надежности. Выходы пульта управления 1.и блока 2 датчиков верхнего и нижнего положений автооператора соединены с входом блока 3 программ, выходы которого соединены с дешифратором 5 команд отключения двигателя и включения тормозного устройства, с блоком 6 управления. Датчик зуба 7 грубого отсчета соединен со счетчиком 8. Нони- усные датчики зуба 9.1-9.П соединены с коммутатором 10, выход которого связан с аналого-цифровым преобразо- вателем 11, выход которого соединен с вычислительным устройством 12-, который связан с регистром точного отсчета 13. Выход последнего соединен с регистром позиций 14, а вход блока 15 определения ошибки позиционирования соединен с выходом регистра позиций 14 и вычислительным устройством 12. Повьш1ение надежности до стигается введением в данное устройство нониусного датчика зуба, коммутатора, аналого- цифрового преобразователя, вычислительного устройства, регистра точного отсчета, регистра позиций и блока определения ошибки позиционирования. 1 ил. (f С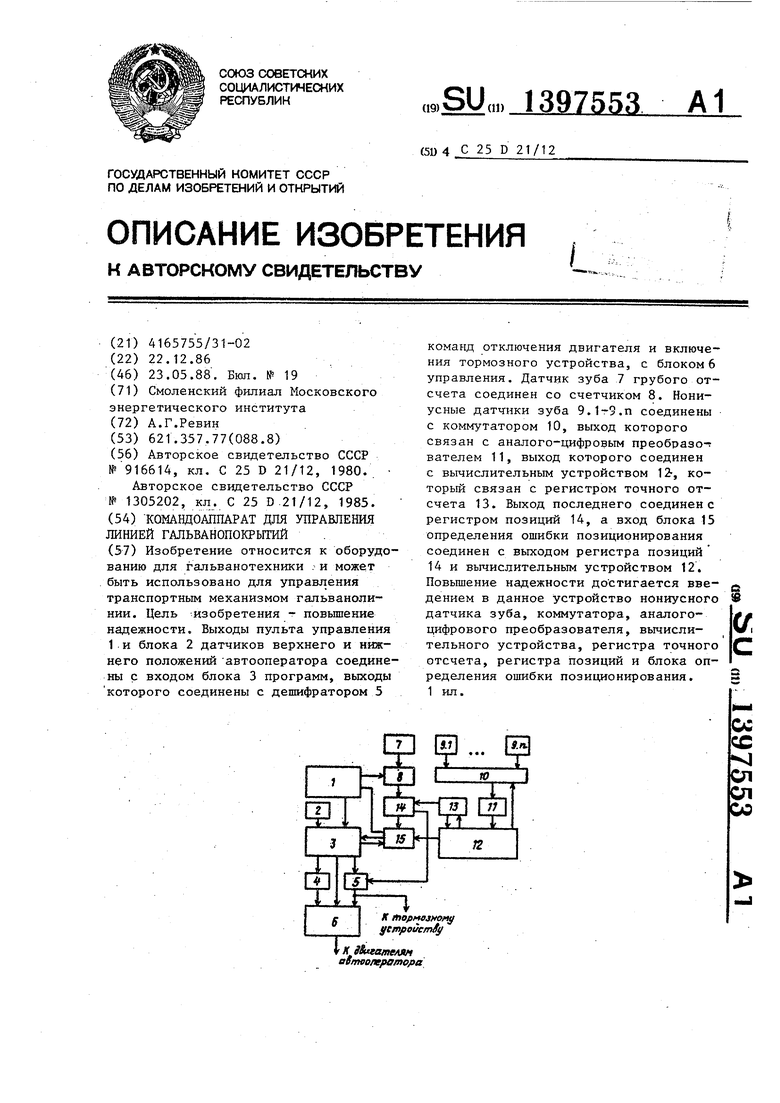
| Авторское свидетельство СССР № 916614, кл | |||
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
| Устройство управления автооператорами линий гальванопокрытий | 1985 |
|
SU1305202A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
