113
Изобретение относится к устройствам для управления приводом телеско- nHi ecKoro захвата и используется на складах штучных грузов.
Цель изобретения - повьш1ение надежности.
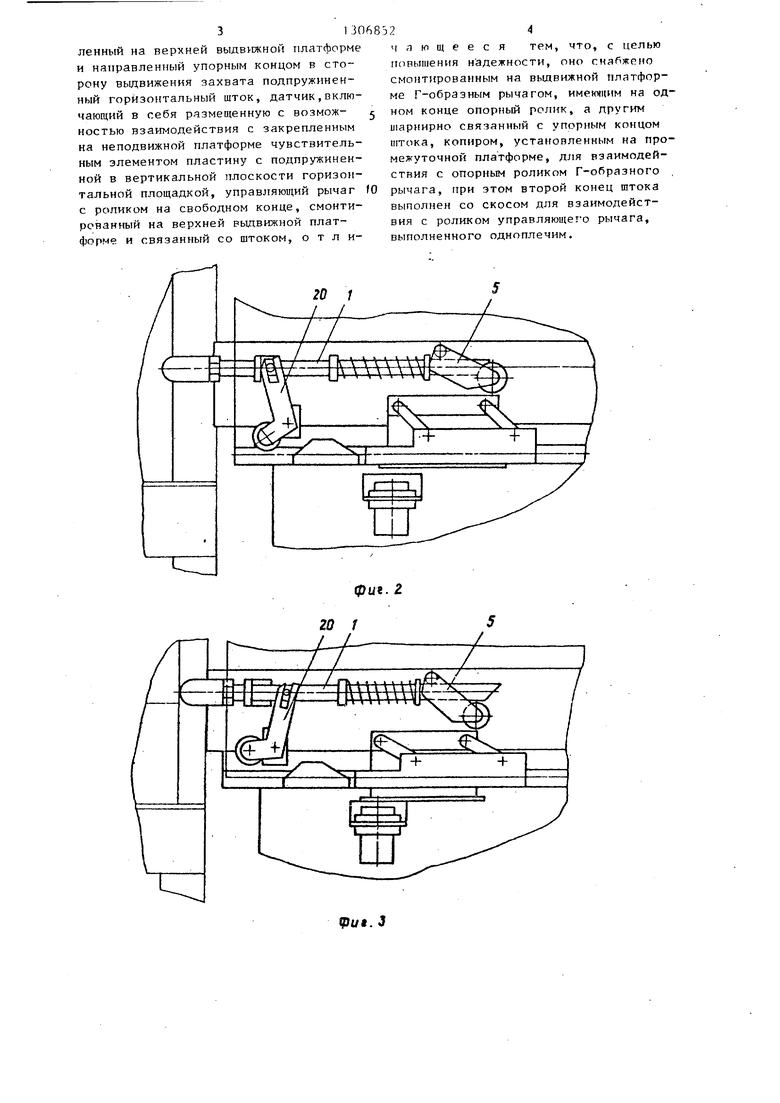
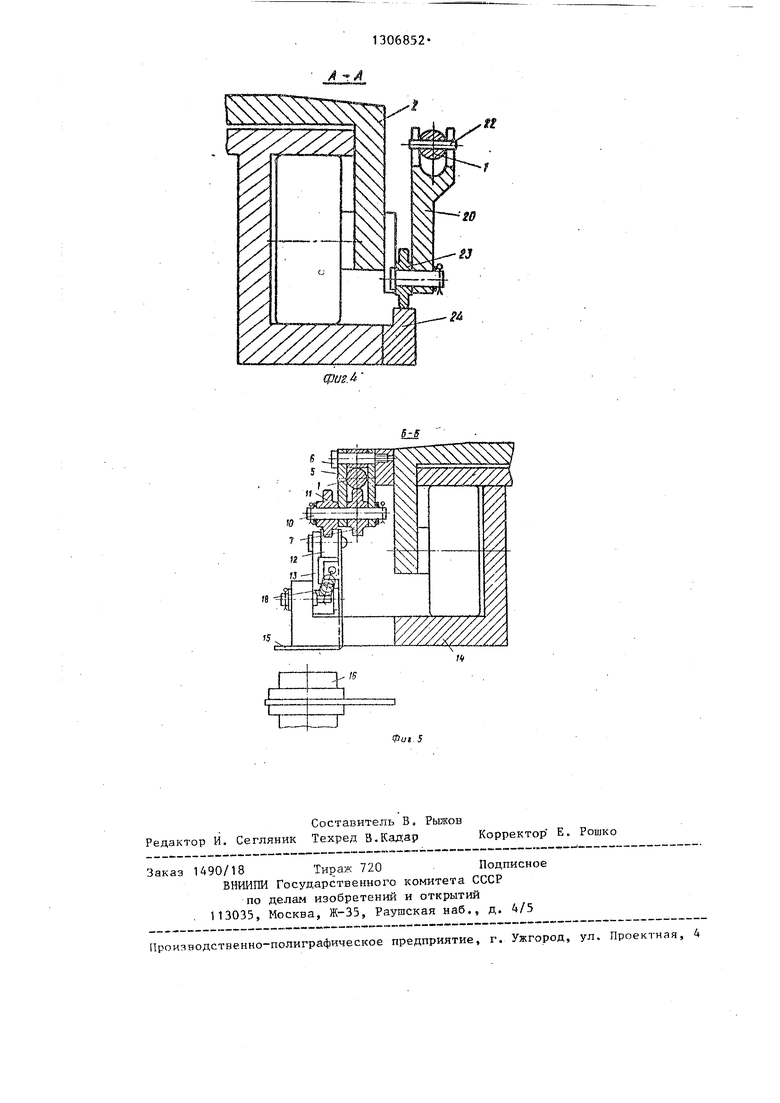
На фиг. 1 изображено предлагаемое устройство, в исходном положении, общий вид; на фиг. 2 - то же,, при свободной ячейке; на фиг. 3 - то же, при занятой ячейке; на фиг. 4 -- разрез Л-А на фиг. 1; на фиг. 5 - разрез Б-Б на фиг. 1.
Устройство для управления приводом телескопического захвата стеллажного крана-штабелера крепится к телескопическому захвату известной конструкци и содержит подпружиненный шток 1, подвижно закрепленный на выдвижной платформе 2 телескопическото захвата Передний конец штока 1 установлен в опоре 3, закрепленной на платформе 2 Другой конец штока 1 снабжен копиром 4, выполненными, напримерэ в вид скоса, и размещен в пазу одноплечего рычага 5, образованного осью 6 поворота рычага 5 и роликом 7. Ролик 7 расположен на свободном конце рычага 5 и поджат к штоку 1 пружиной 8„ Пружина 8 размещена на штоке 1 и ограничена с другого торца упором 9. На общей оси 10 с роликом 7 установлен ролик 11.
Ролик 11 в процессе работы устройства взаимодействует с планкой 12. Планка 12 тягами 13 шарнирно прикреплена к промежуточной платформе 14 каретки.
На планке 12 закреплена пластина 15, взаимодействующая с конечным выключателем 16, который установлен на неподвижной платформе 17, В верхнем положении пластина 15 и планка 12 удержива отся пружиной 18.
На выдвижной платформе 2 на оси 19 установлен Г-образный рычаг 20, одно плечо которого снабжено пазом 21, по- .средством которого рычаг 20 взаимодействует со штифтом 22, закреплен- на штоке 1 .
Другое плечо рычага 20 снабжено роликом 23. Ролик 23 взаимодействует с копиром 24, установленным на промежуточной платформе 14 каретки крана-штабелера.
Устройство работает следующим образом.
В исходном положении ролик 23 Г-об- разного рычага 20 размещен на копире 24. Другое плечо рычага 20, взаимоействующее со штифтом 22, преодоле- вая сопротивление пружины В, удерживает подпружиненный шток 1 в крайнем Правом положении. Другие концом пруина 8 прижимает ролик 7 рычага 5 к цилиндрической поверхности штока 1. При выдвижении телескопического захвата влево выдвижная платформа 2 перемещается в два раза быстрее промежуточной платформы 14 каретки. При качении ролика 23 по поверхности ко- пира 24 происходит поворот рычага 20 Против часовой стрелки и перемещение влево его второго плеча, а вместе с ним и штока 1, связанного с плечом посредством штифта 22.
Величина этого перемещения зависит от угла поворота рычага 20 и соотношения длин его плеч,
При дальнейшем перемещении телескопического захвата ролик 23 Г-об разного рычага отходит влево от копира 24. Шток 1 усилием пружины 8 отжимается влево, опережая выдвижную платформу 2.
При перемещении штока 1 влево, ролик 7 рычага 5 перемещается по цтт- линдрической части штока 1, а затем по его скосу 4 вверх. Рычаг 5 в это время поворачивается ггротив часовой стрелки. Ролик 11 рычага 5 проходит над планкой 12, не задевая ее.
Если ячейка занята, шток 1 упира
ется в лрепятствие и начинает переме- щаться вправо относительно выдвижной платформь 2 телескопического захвата. Перемещаясь вправо, шток 1 скосом 4 воздействует I a 7. Ролик 7 перекатывается со скоса 4 на цилиндрическую часть штока 1. Рычаг
5 поворачивается по часовцй стрелке, . Ролик 11, установленный соосно с роликом 7 на рычаге 5, опускается вниз и нажимает на планку 12. Планка 12 вместе с пластиной 15 опускается вниз.
Пластина 15 в свою очередь взаимодействует с конечным выключателем 16, коммутирующим электрическую цепь привода телескопического захвата.
Формула изобретения
Устройство для управления приводом телескопического захвата стеллажного крана-штабелера, содержащее установ3130fi85
ленный на верхней выдв1-шной платформе и направленный упорным концом в сторону выдвижения захвата подпружиненный горизонтальный шток, датчик,включающий в себя размещенную с возмож- ностью взаимодействия с закрепленным на неподвижной платформе чувствительным элементом пластину с подпружиненной в вертикальной плоскости горизонтальной площадкой, управляющий рычаг fO с роликом на свободном конце, смонтированный на верхней выдвижной платформе и связанный со штоком, отличающееся тем, что, с целью повышения надежности, оно снабжено смонтированным на выдвижной платформе Г-образным рычагом, имеющим на одном конце опорньй ролик, а другим uiapfmpHO связанный с упорным концом штока, копиром, установленным на промежуточной платформе, для взаимодействия с опорным роликом Г-образного , рычага, при этом второй конец штока выполнен со скосом для взаимодействия с роликом управляющего рычага, выполненного одноплечим.
Jpue. 2
Р(/. 3
2&
фиг4 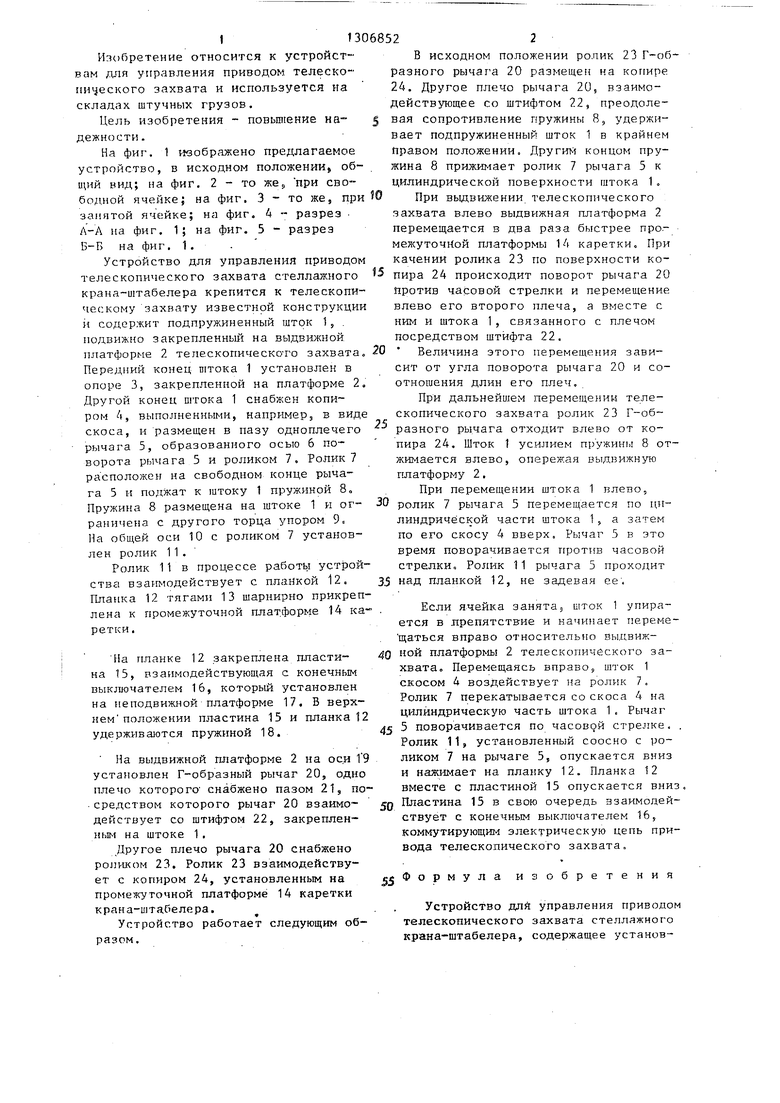
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления приводом телескопического захвата стеллажного крана-штабелера | 1988 |
|
SU1594079A1 |
| Устройство для управления приводом телескопического захвата стеллажного крана-штабелера | 1986 |
|
SU1418206A1 |
| Устройство для управления телескопическим захватом стеллажного крана-штабелера | 1982 |
|
SU1008156A1 |
| Устройство для управления приводом телескопического захвата стеллажного крана-штабелера | 1988 |
|
SU1643341A1 |
| Устройство для управления приводом телескопического захвата стеллажного крана-штабелера | 1985 |
|
SU1341122A2 |
| Устройство для управления приводом телескопического захвата стеллажного крана-штабелера | 1990 |
|
SU1733346A1 |
| Устройство для контроля занятости ячейки стеллажного крана-штабелера | 1974 |
|
SU567648A1 |
| Устройство для управления телескопическим захватом стеллажного крана-штабелера | 1981 |
|
SU1011468A1 |
| Устройство для контроля занятости ячейки стеллажного крана-штабелера | 1977 |
|
SU747779A2 |
| Автоматизированный склад для хранения штучных грузов | 1983 |
|
SU1152890A1 |
Изобретение относится к устройствам управления приводом телескопического захвата крана-штабелера. Цель изобретения заключается в повьппении надежности, что происходит за счет увеличения хода подпружиненного штока. Устройство содержит подпружиненный шток 1, подвижно соединенный через штифт с Г-образным рычагом 20, установленным на выдвижной платформе 2 и взаимодействующим с копиром 24 посредством ролика 23. Другой конец штока 1 выполнен со скосом 4 и размещен между осью поворота рычага 5 и роликом, размещенным на свободном конце рычага 5 и поджатым к штоку 1 пружиной В. Ролик 11, установленный соосно с роликом на рычаге 5, опускает вниз планку 12, соединенную с пластиной 15. Пластина 15 взаимодействует с концевым выключателем 16, коммутирующим электрическую цепь привода. 5 ил. (Л а1л/л л1К 7со 05 СХ) сл Фие.1
J5
Составитель В, Рыжов Редактор И. Сегляник Техред В.Кадар Корректор Е. Рошко
Заказ 1490/18 Тираж 720Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий . 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно
-полиграфическое предприятие, г. Ужгород, ул. Проектная,
| Устройство для управления телескопическим захватом стеллажного крана-штабелера | 1982 |
|
SU1008156A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
