Изобретение относится к вспомогательному оборудованию цехов, а бо- лее конкретно - к элементам манипуляторов, смонтированных на наземных транспортных средствах и может быть использовано в автооператорах, входя щих в состав автоматических линий гальванических цехов.
Известен автооператор АММ-2 для гальванических линий, содержащий корпус, механизм вертикального и грризонтального перемещения, направляющие и захватный орган 1.
Однако переналадка автооператора на линии с разногабаритными ВдМнами требует значительных затрат времени.
Известен также автооператор для гальнано-химических автоматов, содержащий корпус, мexaниз tы вертикальног и горизонтального перемещений, направляющие и захватные 6рганыГ2.
К недостаткам известных конструкций автооператорЪв следует отнести т что захватный орган неподвижно скреплен с механизмом вертикального перемещения, а следовательно, и расстояние между ловителями остается неизменным, что снижает .технологические возможности автооператоров, а перестановка ловителей очень .сложная операция.
Цель изобретения - повышение универсальности автооператора,
ПЬставленная цель достигается тем, что в устройстве, содержащем корпус, механизмы вертикального и горизонтального перемещений, направляющие и захватные органы,каждый захватный орган снабжен брусом со сквозным Т-образным пазом, в котором установлены ловители с возможностью горизонтального перемещения, а брус установлен шарнирно на каретке механизма вертикального перемещения посредством втулок и подпружиненных скалок.
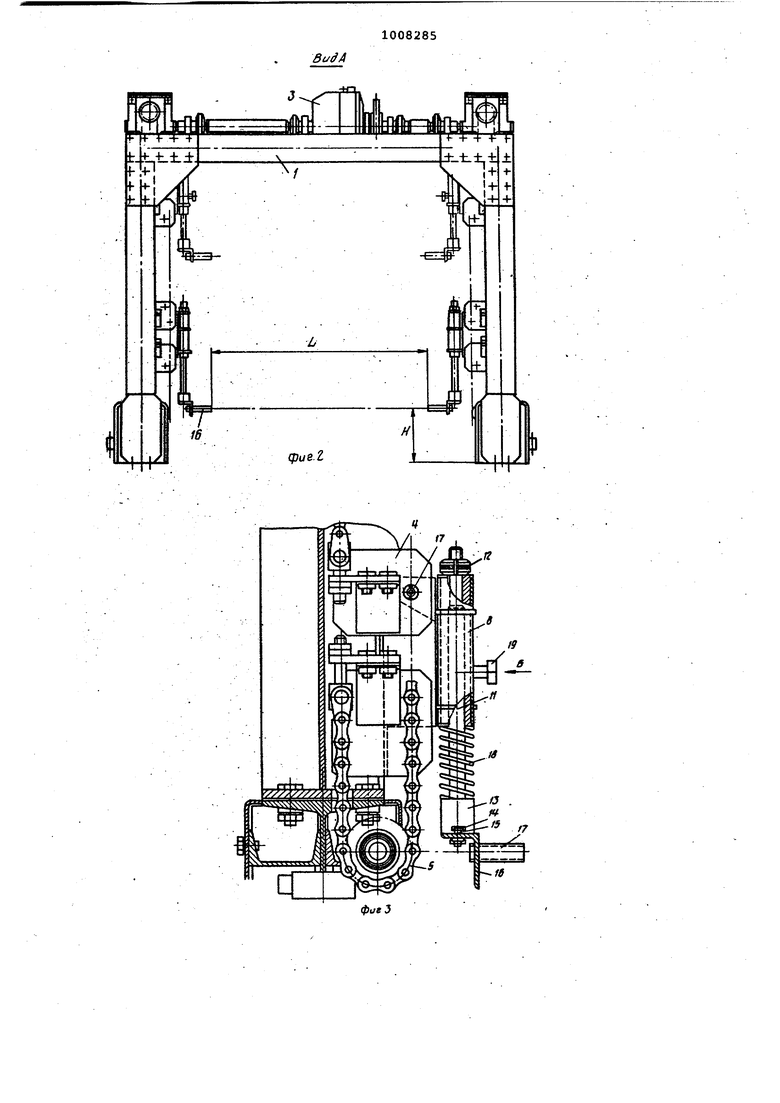
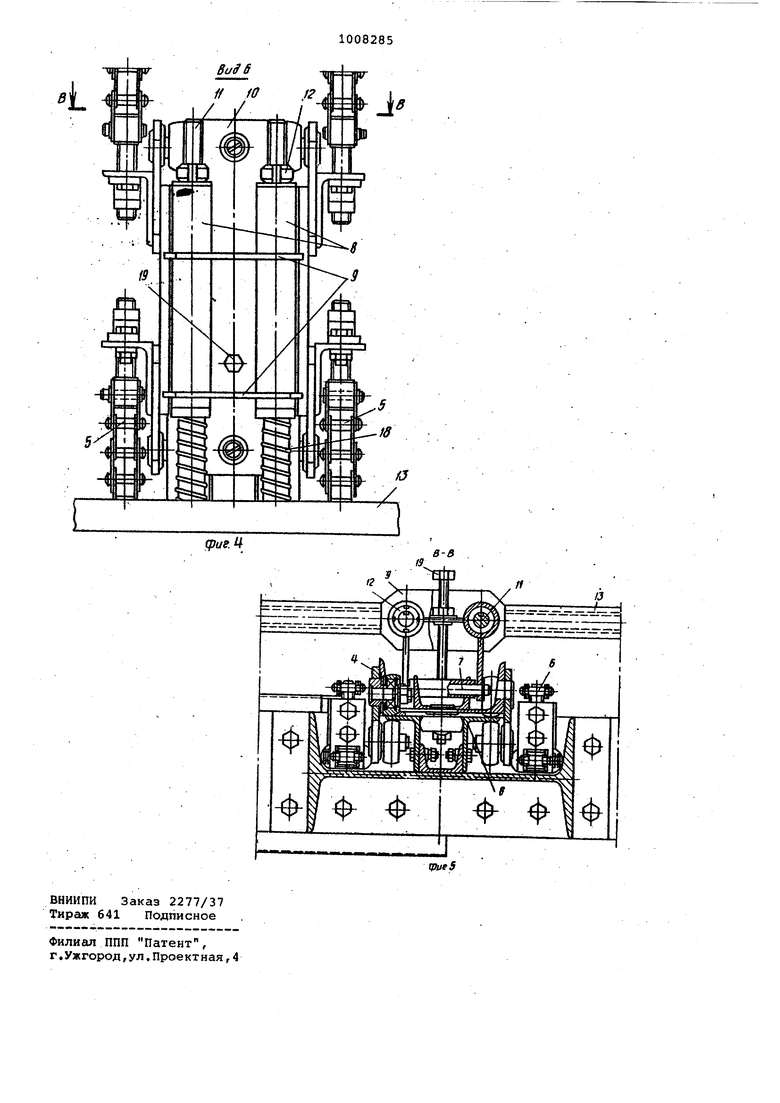
.На фиг.1 изображен автооператор, общий вид; на фиг.2 - вид А на фиг.1,- на фиг.З - захватный орган автроператора; на фиг.4 - вид В на фиг.З; на фиг.5 - разрез В-В на фиг.
Автооператор состоит из корпуса I, выполненного в виде портала, перемещающегося на катках по направляющим (не показаны), на котором укреплены механизм горизонтального перемещения 2 и электродвигатель 3 механизма вертикального перемещения, состоящего из каретки 4, тяговой
цепи 5 и направляющ 1х б. На каретке 4 посредством шарнира 7 подвешены втулки 8, скрепленные между собой горизонтальными пластинами 9 и вертикальной пластиной 10. Через втулки 8 пропущены скалки 11, на верхнем конце которых установлены гайки 12, а нижние концы скалок скреплены с брусом 13. На нижней плоскости бруса 13 выполнен Т-образный паз 14, в котором болтом 15 через кронштейны 16 укреплены ловители 17. Брус 13 с ловителями 17 от. самопроизвольных перемещений относите.льно втулок 8 удерживаются пружинами 18, а положение ловителей 17 каждого захваного органа относительно друг друга регулируется установочным винтом 19, размещенным на пластине 10.
Автооператор работает следующим образом.
С помощью механизма горизонтального перемещения 2, корпус 1 подается к технологической ванне (не показана ) включается электродвигатель 3, который приводит в движение цепь 5 и каретка 4 перемещается по направляющим fi вверх. Ловители 17, захватного органа, подвешенного при помощи шарнира 7 на корпусе кареткг 4, захватывают подвеску с изделиями и извлексцот их, и ванны.
Благодаря вьтолнению захватного органа предлагаемым образом расши-. ряются технологические возможности устройства, так как наличие шарнирного соединения между кареткой подъемного механизма и захватным органом позволяет изменять расстояние между ловителями за счет обеспе ения возможности установки захватного органа под углом к вертикали и удержании его в этом положении установочным винтом, что в конечном результате позволяет автооператору предлагаемой конструкции обслуживать гальванические линии с разногабаритными Ваннами. За счет увеличения числа ловителей, которое может изменяться благодаря наличию в брусе захватного органа сквозного Т-образного паза, повышается производительность автооператора.
Кроме того, за счет регулировки длины подпружиненных скалов можно регулировать величину Н.
Экономический .эффект от внедрения устройства составит 1785 руб. в год на одну гальваническую линию.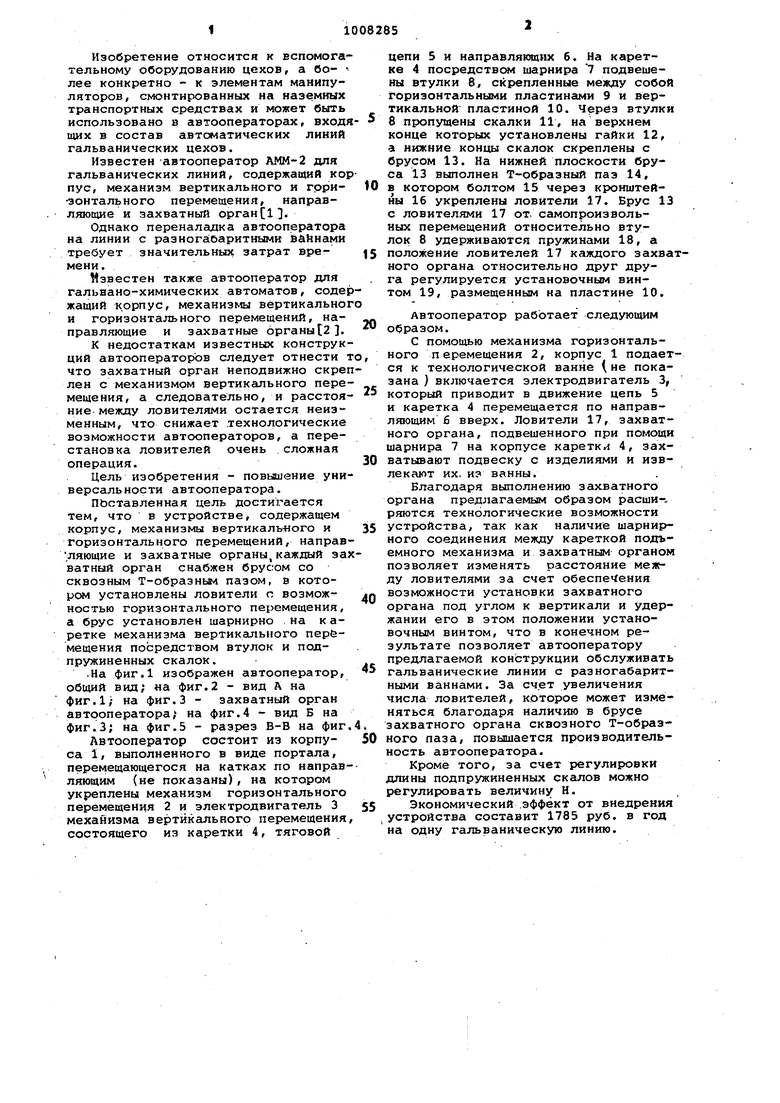
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для подачи полосового и ленточного материала в рабочую зону пресса | 1983 |
|
SU1134264A1 |
| Линия для химического фрезерования крупногабаритных изделий | 1983 |
|
SU1117341A1 |
| Автоматизированная поточная линия для изготовления сварных конструкций | 1991 |
|
SU1784430A1 |
| Автооператор для гальванических линий | 1980 |
|
SU908716A1 |
| Автоматическая линия для нанесения гальванических покрытий | 1989 |
|
SU1696612A1 |
| Автооператор для гальванических линий | 1984 |
|
SU1178806A1 |
| Манипулятор к штамповочному прессу | 1990 |
|
SU1787807A1 |
| Автооператор | 1977 |
|
SU707767A2 |
| АВТОМАТИЗИРОВАННОЕ УСТРОЙСТВО | 1991 |
|
RU2014981C1 |
| Автооператор | 1987 |
|
SU1426746A1 |
АВТООПЕРАТОР, содержащий корпус, механизмы вертикального и го.ризонтального перемещений, направляющие и захватные органы, о У л я ч. а- . ю щ и и с я тем, что, о с целью повьаоения универсальности автооператора,, каждый захватный орган снабжен брусом со сквозным Т-образным пазом, в котором установлены ловители с .возможностью горизонтального переметхения, а брус установлен шарнирно на ка-. :ретке механизма вертикального перемещения посредством втулок и подпружиненных, скалок. (О П 00 ю оо СП
А ±. ./
19
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| АВТООПЕРАТОР АММ 2 ДЛЯ ГАЛЬВАНИЧЕСКИХ ЛИНИЙ | 0 |
|
SU272755A1 |
| Катодное реле | 1921 |
|
SU250A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Автооператор для гальваноавто-MATOB | 1979 |
|
SU850761A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
