Изобретение относится к машиностроению, в частности к схватам роботов для различных технологических процессов.
Целью изобретения является расширение технологических возможностей за счет обеспечения возможности работы с деталями неправильной геометрической формы.
. На фиг.1 ,1оказан схват робота, разрез; на фиг.2 - сечение А-А на фиг.1.
Схват робота содержит корпус 1 с пазами 2. В пазах 2 корпуса 1 установлены губки, выполненные в виде упругих лент 3, концы которых закреплены на направляющих втулках 4 и 5, установленных на корпусе I, при этом упругие ленты пропущены через отверстие втулки 5. Втулки 4 и 5 установлены с возможностью перемещения в продольном направлении и связаны с раздельными приводами их перемещения (не показаньО.
Схват работает следующим образом.
Схват робота вводится в отверстие объекта, подлежащего захвату, и для его фиксации осуществляется опускани втулки 4, которая перемещает упругие ленты 3, пропущенные через отверстие втулки 5 по пазам 2 корпуса 1. Выход упругих лент и пазов 2 происходит д касания ими стенок захватываемого
.объекта. Затем осуществляется опускание втулки 5, которая обеспечивает уменьщение радиуса кривизны упругих лент 3 и тем самым увеличивает усилие зажима объектаi При этом усилие зажима объекта можно изменять в за- ,вр1симости от предъявляемых требований- путем перемещения и различного расположения втулок 4 и 5 на корпусе 1. Освобождение объекта осуществляется в обратной последовательности - подниманием вверх втулок 4 и 5 по кор пусу 1.
15 ф
ормула изобретения
0
5
0
Схват робота, содержащий корпус губки в виде гибкой ленты и привод перемещения губок, отличающийся тем, что, с целью расширения технологической возможности за счет обеспечения возможности работы с деталями неправильной геометрической формы, он снабжен двумя втулками и дополнительными лентами, а корпус выполнен в виде стержня, расширяющегося на конце, в котором проделаны пазы, причем втулки жестко соединены с соответствующими концами гибких лент, средние части которых размещены в пазах корпуса, при этом втулки, установлены соосно стержню и имеют возможность перемещения вдоль него.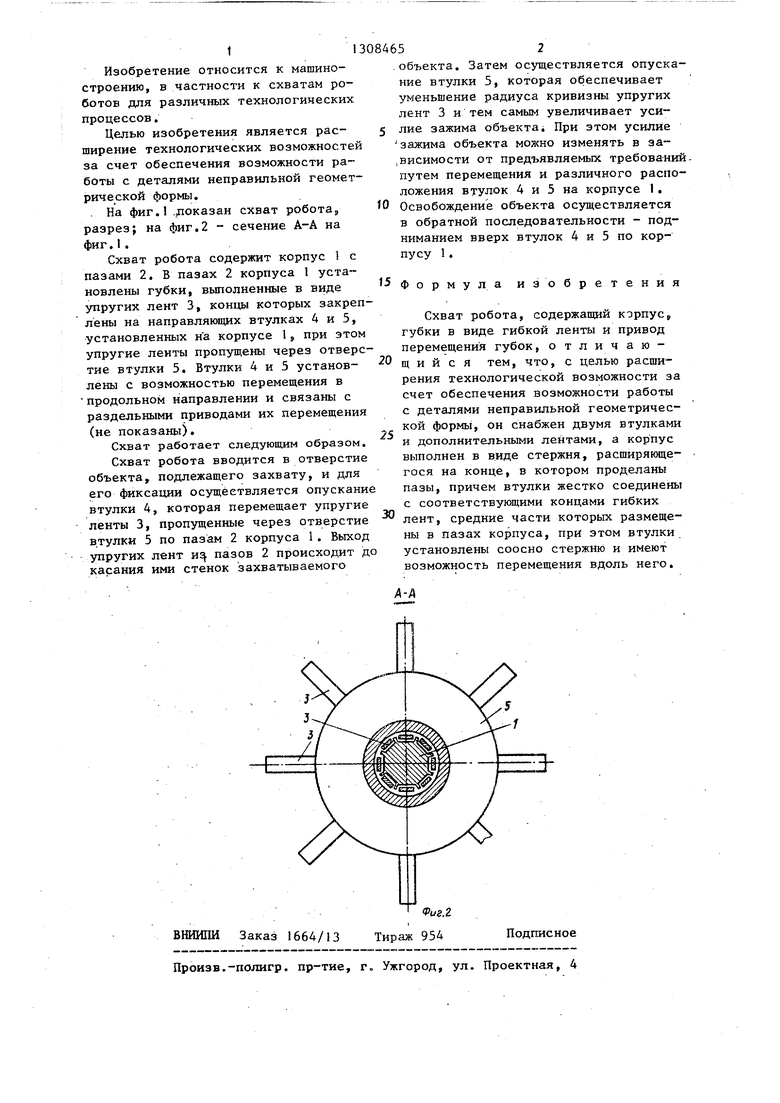
| название | год | авторы | номер документа |
|---|---|---|---|
| Схват | 1979 |
|
SU837922A1 |
| Схват манипулятора | 1986 |
|
SU1390019A1 |
| МНОГОПОЗИЦИОННОЕ ЗАХВАТНОЕ УСТРОЙСТВО МАНИПУЛЯТОРА | 1992 |
|
RU2033918C1 |
| Схват робота | 1990 |
|
SU1761463A1 |
| Групповой схват промышленного робота | 1988 |
|
SU1535714A1 |
| ЗАХВАТНОЕ УСТРОЙСТВО | 1991 |
|
RU2022781C1 |
| Захват промышленного робота | 1985 |
|
SU1288051A1 |
| Схват | 1981 |
|
SU952581A1 |
| Исполнительный орган промышленного робота | 1977 |
|
SU738867A1 |
| Схват манипулятора | 1983 |
|
SU1096098A1 |
Изобретение относится к области машиностроения, в частности к схватам робота. Цель изобретения - рас/Ч « К.. ширение технологических возможностей за счет обеспечения возможности ра-. боты с деталями неправильной геометрической формы. Схват робота содержит корпус 1 с пазами 2, в которых установлены губки, вьтолненные в виде упругих лент, концы которых закреплены на направляющих втулках 4 и 5, смонтированных на корпусе 1, при этом упругие ленты пропущены через отверстия втулки 5. Втулки 4 и 5 установлены с возможностью перемещения в продольном направлении и связаны с раздельными приводами их перемещения. 2 .ил. (Л 00 о 00 н 05 ел (Puz.l
Фиг.2 ВНИИПИ Заказ 1664/13 Тираж 954 Подписное
Произв.-полигр. пр-тие, г. Ужгород, ул. Проектная, 4
