72
сриг.
Изобретение относится к машиностроению и может быть использовано при автоматизации загрузки станков с применением промышленных роботов.
Целью изобретения является повышение надежности работы конвейера.
На-фиг. 1 показано схематическое изображение шагового конвейера; на фиг. 2 - схематическое изображение шагового конвейера, робота и технологического оборудования, вид сверху.
Шаговый конвейер состоит из расположенных на основании 1 неподвижных на- правляюш.их 2, по которым перемеш.аются детали заготовки 3, штанги 4. На штанге 4 через равные промежутки на осях шар- нирно закреплены толкатели в виде собачек 6 одностороннего действия. Под действием пружины 7 собачки 6 стремятся повернуться так, что нижняя часть их при толкании заготовок 3 упирается в шпильку- упор 8, закрепленную на подвижной штанге 4. К последней по ходу транспортирования собачке 9 жестко прикреплен рычаг 10. Основание 1 конвейера выполнено с выступом 11. К подвижной штанге 4 прикреплен шток привода 12 возвратно-поступательного перемеш,ения штанги 4.
При этом выступ 11 установлен на основании 1 с возможностью взаимодействия с рычагом 10 собачки 9 и отк.лонения последней в направлении транспортирования в конце рабочего хода штанги 4.
В технологическое оборудование робо- тотехнического комплекса кроме шагового конвейера 13 входит станок 14, робот 15 и. тара 16.
Шаговый конвейер работает следуюшим образом.
Поршневым приводом 12 штанга 4 перемещается вперед, при этом собачки 6 перемещают заготовки 3 по направляющим 2 на шаг. Перед концом хода штанги 4 рычаг 10 последней собачки 9 упирается в неподвижный выступ 11 и собачка 9, поворачиваясь вокруг своей оси по часовой
0
5
0
5
0
5
0
стрелке, выдвигает последнюю деталь впе- .ред так, что ход детали превышает шаг конвейера. За счет этого расстояние между предпоследней и последней деталью увеличивается. Это расстояние необходимо для захвата заготовки схватом робота 15. При обратном движении штанги 4 собачки 6 и 9 сначала наталкиваются задней стороной на нижнюю часть заготовки 3 и утапливаются в гнездо штанги 4. При дальнейшем движении штанги 4 назад собачки 6 и 9 поворачиваются в исходное положение и готовы для захвата и перемещения очередных заготовок.
Использование шагового конвейера позволяет расширить его технологические возможности за счет одновременной транспортировки деталей и отделе1{ия одной заготовки с целью захвата ее роботом. В этом случае исключается необходимость дополнительного механизма для отделения заготовки.
Формула изобретения
1.Шаговый конвейер, содержащий расположенные на основании неподвижные направляющие для деталей и штангу с установленными на ней толкателями, последний по ходу транспортирования из которых выполнен в виде шарнирно закрепленной на оси собачки одностороннего действия, и привод возвратно-поступательного перемещения штанги, отличающийся тем, что, с целью повышения надежности работы конвейера, основание выполнено с выступом, а собачка одностороннего действия имеет рычаг, при эт,ом выступ установлен на основании с возможностью взаимодействия с рычагом собачки и отклонения последней в направле ши транспортирования в конце рабочего хода штанги.
2.Конвейер по п. 1, отличающийся те.м, что каждый толкатель выполнен в виде подпружиненной собачки одностороннего действия.
ооооо
;4
Составитель Л. Расторгуева
Редактор Н. СлободяникТе.ред И. ВересКорректор А. Знмокосов
Заказ 1754/20Тираж 778Подписное
ВНИИПИ Государственного комитета СССР по делам изобретений и открытий
И 3035, Москва, Ж-35, Раушская наб., д. 4/5 Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4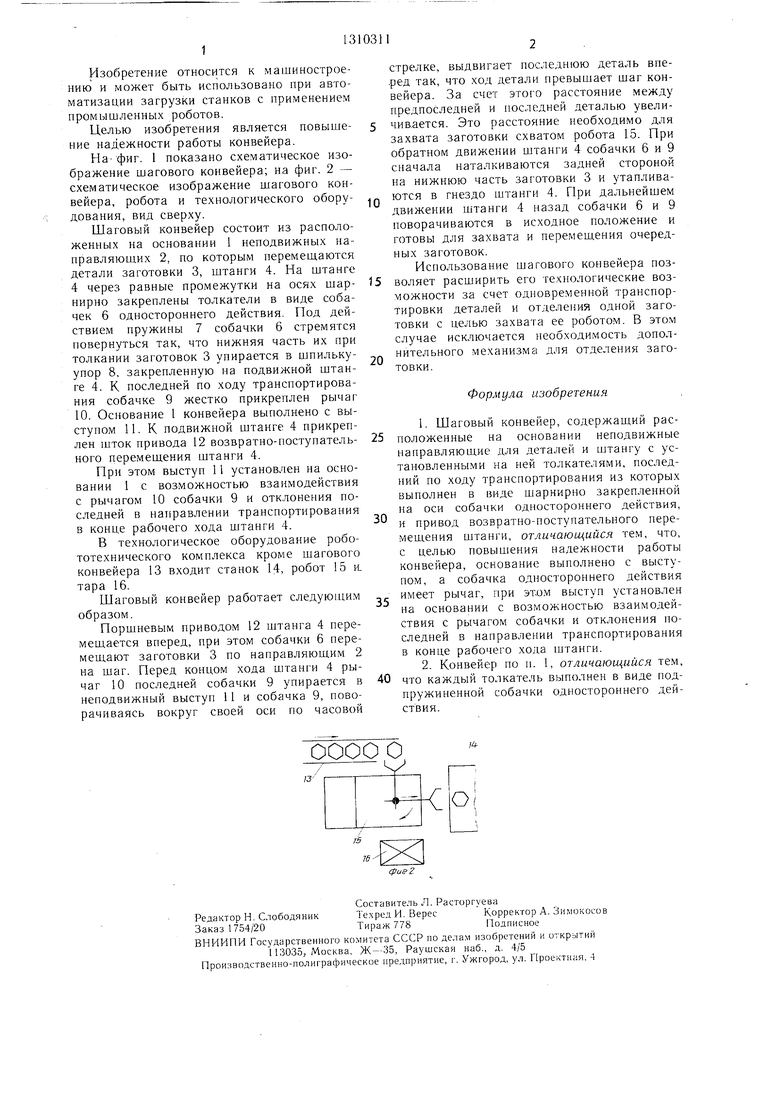
| название | год | авторы | номер документа |
|---|---|---|---|
| Шаговый конвейер | 1982 |
|
SU1008107A1 |
| ШАГОВЫЙ КОНВЕЙЕР | 1994 |
|
RU2078727C1 |
| Устройство для транспортирования деталей между автоматическими линиями | 1988 |
|
SU1548134A1 |
| Шаговый конвейер | 1980 |
|
SU899411A1 |
| Шаговый конвейер | 1977 |
|
SU663637A1 |
| Устройство для поштучной выдачи изделий | 1986 |
|
SU1425042A1 |
| Шаговый конвейер | 1978 |
|
SU781136A1 |
| Реверсивный конвейер | 1983 |
|
SU1159846A1 |
| Шаговый конвейер-накопитель | 1984 |
|
SU1266809A1 |
| Устройство для отделения верхней заготовки от стопы и подачи ее в зону обработки | 1986 |
|
SU1524959A1 |
Изобретение относится к .машиностроению и м.б. использовано при автоматизации загрузки станков с применением про.мыш- ленных роботов. Целью изобретения является повышение надежности работы конвейера. На основании 1 конвейера, и.мею- щем выступ 11, расположены неподвижные направляющие 2 для деталей и подвижная штанга (ПШ) . 4 с приводом возвратно- поступательного перемещения со штоком 12. На ПШ 4 установлены толкатели в виде шарнирно закрепленных на оси подпружиненных собачек (С) 6, 9 одпосторо 1него действия. К последней по ходу транспортирования С 9 жестко прикреплен рычаг К), с которым взаимодействует выступ 11 и отклоняет С 9 в направлении транспортирования в конце рабочего хода ПШ 4. Прп перемещении ПШ 4 заготовки перемещаются С 6 по направляющим 2 па шаг. Перед концом хода рычаг 0 упирается в BI,I- ступ II и С 9, поворачиваясь вокруг оси. выдвигает последнюю деталь вперед так, что ход детали превышает inar конвейера. При обратном движении С 6 и 9 наталкиваются на нижнюю часть заготовки и утапливаются в гнездо ПШ 4. При дальнейн1ем движении ПШ 4 С 6 и 9 поворачиваются в исходное положение и готовы для захвата и перемещения следуюн;их заготовок. 1 з.п. ф-лы, 2 ил. S СО о со 7U 71
| Брон Л | |||
| С | |||
| и др | |||
| Конструкция и наладка автоматических линий и специальных станков | |||
| М.: Высшая-школа, 1977, с | |||
| Способ получения борнеола из пихтового или т.п. масел | 1921 |
|
SU114A1 |
| Фальцовая черепица | 0 |
|
SU75A1 |
| Прибор для охлаждения или подогревания утфеля в рафинадных формах | 1928 |
|
SU11488A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
