Изобретение относится к транспортному оборудованию, а именно к ленточным конвейерам.
Цель изобретения - уменьшение энергоемкости нроцесса транспортирования при изменении нагрузки на конвейер.
На фиг. 1 изображен ленточный конвейер; на фиг. 2 - компановка приводного и концевого барабанов, вид сбоку; на фиг. 3- то же, разрез; на фиг. 4 - датчик натяжения ленты; на фиг. 5 - принципиальная электрическая схема управления приводом барабанов; на фиг. 6 - компановка поддерживающих роликоопор.
Ленточный конвейер содержит приводной 1 и концевой 2 барабаны с ориентированными выступами на поверхности, расположенными с шагом, равным длине волны собственных колебаний груженой ленты 3, охватывающей барабаны, и упруго закрепленные поддерживающие роликоопоры 4, имеющие возможность свободно колебаться в вертикальной плоскости, датчик 5 натяжения ленты и механизм б натяжения. Каждый барабан состоит из пары наружных 7 и пары внутренних 8 шайб. Причем наружная шайба выполнена заодно с зубчатым колесом 9, а внутренняя шайба 8 связана жестко с второй внутренней шайбой полой трубой 10, на которой смонтирован привод поворота шайб в виде реверсивного электродвигателя 11 и червячного редуктора 12. Ведомый вал 13 редуктора представляет собой трансмиссионный вал, опирающийся на подшипники скольжения в правой и левой внутренних шайбах, на концы которого посажены зубчатые шестерни 14, входящие в зацепление с зубчатыми колесами 9 наружных . Наружные шайбы жестко связаны между собой ведущим валом конвейера, на котором свободно могут врапа,аться внутренние шайбы и труба.
Каждый выступ 15 барабанов одним концом звена 16 соединен с одной внутренней шайбой, а другим концдм звена с наружной ц.1айбой. Изменение длины волны вынужденных колебаний осуществляется путем разведения выступов 15 Ьарабанов. Разведение, производится за счет электродвигателя 1 1, смонтированного внутри барабана, команды на который подаются от датчика 5 натяжения ленты, который состоит из корпуса 17, изолированных от корпуса контактов 18 и 19, штока 20 с роликом 2 и пружиной 22. На штоке закреплен контакт 23. При нормальном натяжении ленты двигатель 11 не работает.
Управление электродвигателем осуществляется, например, с помощью реверсивного магнитного пускателя. При изменении натяжения ленты замыкаются контакты датчика натяжения ленты, например, контакты 18 и 23, В результате этого замыкается цепь питания катущки В (фиг. 5) и одновременно размыкается контакт В в цепи катушки Я (электрическая б.гокировка). Контакты В силовой цепи, срабатывая, подключают электродвигатель к сети с вращением ротора в определенную сторону.
При замыкании контактов 19 и 23 цепь катушки В разрывается, двигатель отключается от сети, но одновременно замыкается цепь катушки Н. В результате этого контакты Я силовой цепи замыкаются и дви0 ратель подключается к сети, но с вращением ротора в противоположную сторону. Механизм 6 натяжения компенсирует снижение натяжения ленты при уменьщении диаметра барабана.
5 Конвейер работает следующим образом. При включении электродвигателя он через передачу начинает вращать приводной барабан 1, который перемещает ленту 3 и через нее концевой барабан 2. При этом ленте посредством выступом 15 сооб0 щаются колебания в вертикальной плоскости с длиной волны, равной длине волны собственных колебаний пенагруженной ленты. При нагружении ленты она воздействует на датчик 5 иатяжения, у которого замыкаются контакты 23 и 18, включая реверсивный электродвигатель 11, который разворачивает относительно друг друга шайбы 7 и 8. Последние, в свою очередь, через звенья 16 изменяют средний радиус барабана, а следовательно, и шаг выступов, что
Q -приводит к изменению длины волны до длины волны собственных колебаний загруженной ленты. Роликоопоры 4 свободно колеблются относительно горизонтальной плоскости, давая ленте совершать волнообразное движение. Они являются аккумуляторами этих
с колебаний, накапливая энергию во время своего хода вниз и отдавая ее ленте lipn возвращении в исходное состояние. При этом поддерживается колебательный процесс и повышается КПД конвейера.
Таким образом, при изменении нагрузки
0 на ленту замыкаются соответственно контакты 23 и 18 или 23 и 19 датчика натяжения ленты, что ведет к изменению длины волны колебаний ленты, которая становится равной длине волны собственных колебаний груженой ленты. Это ведет к постоянному наличию резонанса в системе, т.е. к повышению производительности и экономии электроэнергии.
5
Вся система автоматически подстраи- вается в резонапс в зависимости от загрузки ленты. Работа конвейера гтроисходит при оптимальных условиях.
При определенном соотно1пепии шага выступов на барабане, нагрузки на ленту и натяжении ленты возникает параметриче- ский резонанс продольной и поперечной волн. В этом случае система работает в наиболее благоприятных условиях с -ушни- мальными потерями энергии.
Формула изобретения Ленточный конвейер, содержащий приводной и концевой барабаны с валами и выступами, расположенными с шагом, равным длине волны колебаний груженой ленты, охвачтывающей барабаны, и упруго установленные роликоопоры, отличающийся тем, что, с целью уменьшения энергоемкости процесса транспортирования при изменении нагрузки на конвейер, приводной и
концевой барабаны выполнены в виде двух наружных и двух внутренних шайб с приводом и звеньями и установлены с возможностью фиксированного поворота наружных шайб относительно внутренних, при этом на выступах посредством оси закреплены два звена, противоположные концы которых соответственно шарнирно закреплены на наружных и внутренних шайбах, причем привод шайб имеет датчик натяжения ленты.
Ф«г
„Стоп
Qlp-1
в
н
в
н
Н
В
I I
Фиг.5
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ транспортирования сыпучего материала и конвейер для его осуществления | 1981 |
|
SU1011470A1 |
| Ленточный конвейер | 1986 |
|
SU1328249A1 |
| ЛЕНТОЧНЫЙ КОНВЕЙЕР | 2008 |
|
RU2369550C1 |
| НАКЛОННЫЙ ЛЕНТОЧНЫЙ КОНВЕЙЕР | 2009 |
|
RU2408519C2 |
| Устройство для управления шнекороторным экскаватором | 1988 |
|
SU1629417A1 |
| Телескопический ленточный конвейер | 1986 |
|
SU1407861A1 |
| Крутонаклонный конвейер | 1990 |
|
SU1740269A1 |
| Телескоп кассетный ленточный | 2024 |
|
RU2828312C1 |
| ДАТЧИК НАТЯЖЕНИЯ ЦЕПИ (ВАРИАНТЫ), ЦЕПНОЙ КОНВЕЙЕР, СЕНСОРНЫЙ БЛОК ДЛЯ ОБНАРУЖЕНИЯ ПОЛОМКИ ЦЕПИ, СПОСОБ ОПРЕДЕЛЕНИЯ НАТЯЖЕНИЯ ЦЕПИ В ЦЕПНОМ КОНВЕЙЕРЕ И ПРУЖИННЫЙ УЗЕЛ ДЛЯ СЕНСОРНОГО БЛОКА | 2012 |
|
RU2533953C2 |
| ЛЕНТОЧНЫЙ КОНВЕЙЕР | 1992 |
|
RU2042588C1 |


Изобретение относится к транспортному оборудованию и позволяет уменьшить энергоемкость процесса транспортирования при изменении нагрузки на конвейер. Он включает приводной 1 и концевой 2 барабаны (Б) с валами и выступами (В) 15, расположенными с шагом, равным длине волны колебаний груженой ленты (Л) 3, ох- ватываюшей Б 1 и 2, и упруго установленные роликоопоры 4. Оба Б 1 И 2 выполнены в виде двух наружных 7 и двух внутренних 8 шайб с приводом и звеньями 16 и установлены с возможностью фиксированного поворота шайб 7 относительно шайб 8. На В 15 посредством оси закреплены два звена 16. Их противоположные концы шарнирно закреплены соответственно на шайбах 7 и 8. Привод шайб 7 и 8 имеет датчик 5 натяжения Л 3. Вращающийся Б 1 перемещает Л 3 и через нее вращает Б 2. При этом Л 3 посредством В 15 сообщаются колебания в вертикальной плоскости длиной волны, равной длине волны собственных колебаний ненагруженной Л 3. При нагружении Л 3 она воздействует на датчик 5. Включается привод шайб 7 и 8, и шайбы 7 и 8 разворачиваются друг относительно друга. Через звенья 16 шайбы 7 и 8 изменяют средний радиус Б 1 и 2, а следовательно, и шаг В 15. Это приводит к изменению длины волны до длины волны собственных колебаний загруженной Л 3. 6 ил. I (Л со ю о ISD Фиг.1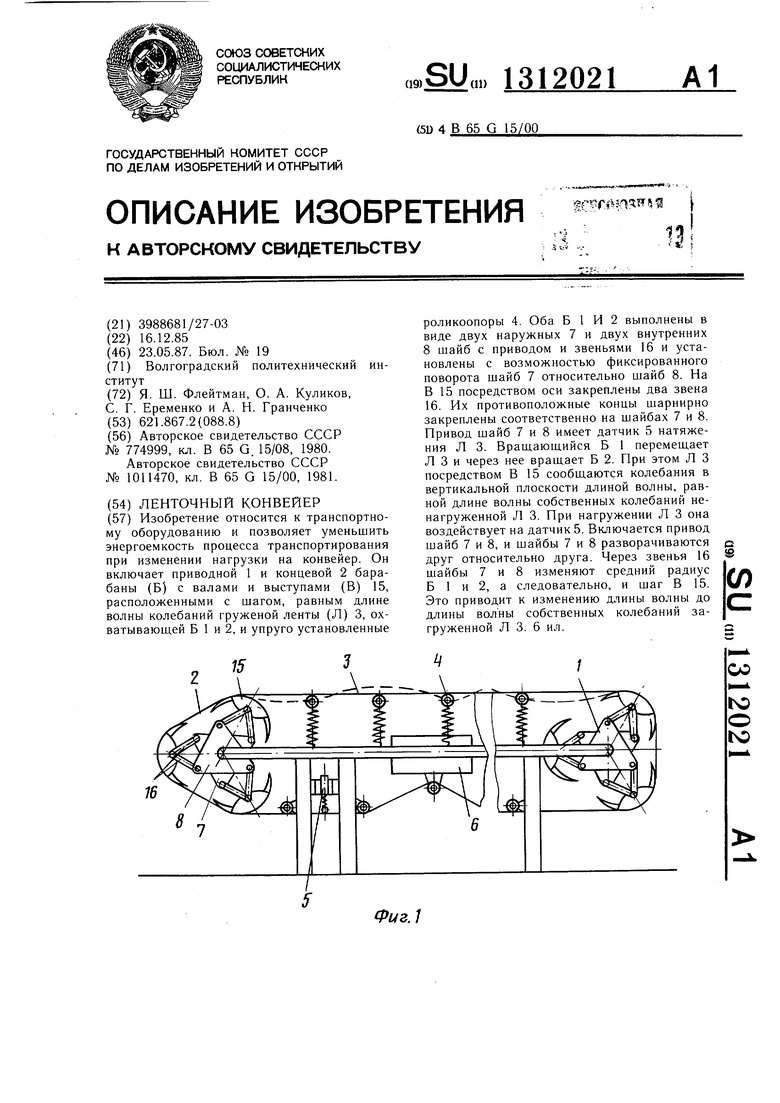
Фиг.6
| Ленточный конвейер | 1979 |
|
SU774999A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
| Прибор для нагревания перетягиваемых бандажей подвижного состава | 1917 |
|
SU15A1 |
| Способ транспортирования сыпучего материала и конвейер для его осуществления | 1981 |
|
SU1011470A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
