Изобретение относится к машиностроению и может быть использовано для механизации и автоматизации вспомогательных технологических процессов.
Цель изобретения - улучшение динамических характеристик промышленного робота путем уменьшения нагрузок на силовые цилиндры приводов.
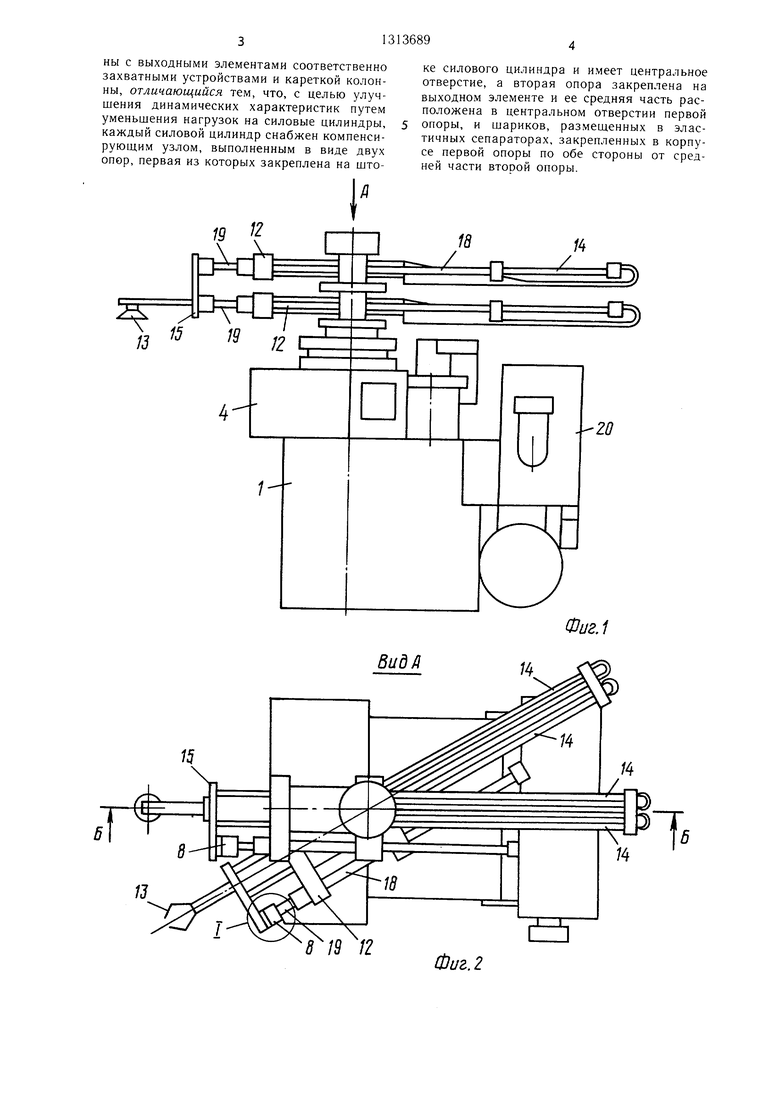
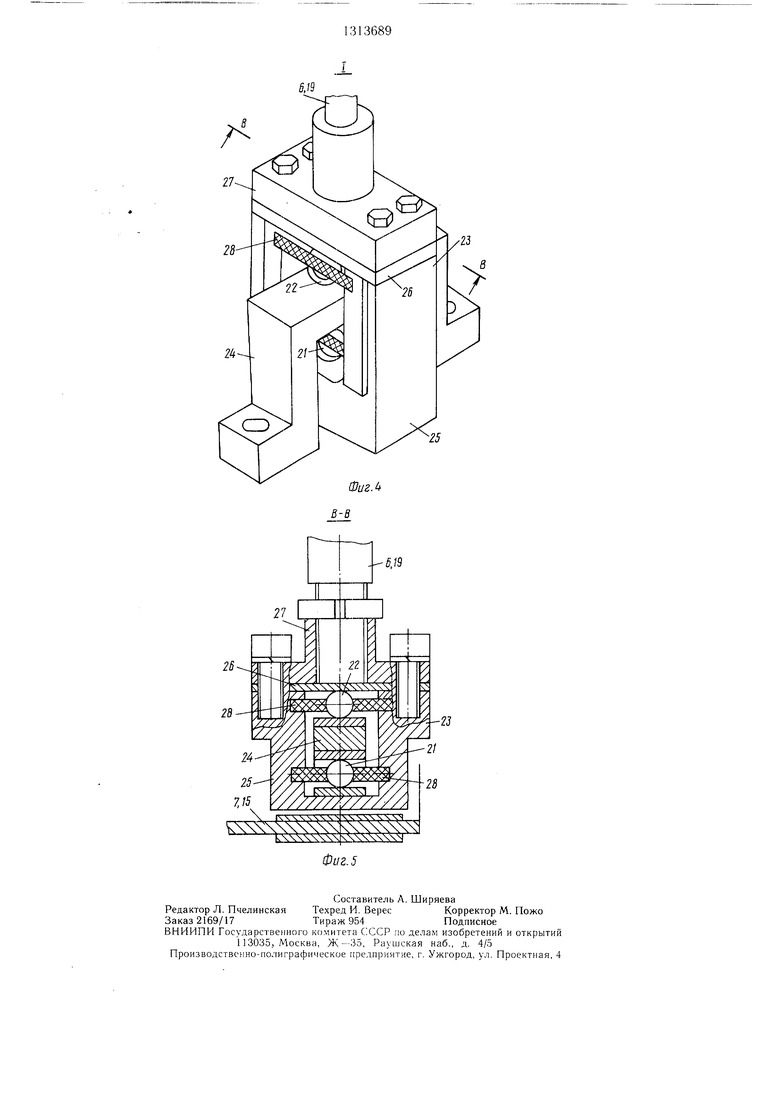
На фиг. 1 изображен промышленный робот, общий вид; на фиг. 2 - вид по стрелке А на фиг. 1; на фиг. 3 - разрез Б-Б на фиг. 2; на фиг. 4 - узел I на фиг. 2 и 3; на фиг. 5 - разрез В-В на фиг. 4.
Промышленный робот состоит из основания 1, на котором установлена колонна 2 с приводами ее подъема 3 и поворота 4.
Привод 3 подъема выполнен в виде силового цилиндра 5, шток 6 которого связан с выходным элементом кареткой 7, смонтированной на колонне 2 посредством компенсирующего узла 8. Каретка 7 с колонной 2 установлена на стойке 9, закрепленной на основании 1, и подпружинена относительно основания 1 посредством пружины 10 сжатия.
Привод 4 поворота выполнен в виде зубчато-реечной передачи и силового цилиндра (не показан), на штоках которого выполнены рейки, взаимодействующие с зубчатым колесом 11, установленным на шлицах колонны 2. На колонне 2 смонтированы механические руки 12 с приводами их выдвижения и захватными устройствами 13. Механические руки 12 включают корпуса, закрепленные на колонне 2, и штанги 14, установленные в корпусах с возможностью выдвижения, и несущие траверсы 15, на которых смонтированы захватные устройства 13. На штангах 14 установлены регулируемые упоры 16, взаимодействующие с пружинами 17 сжатия, расположенными соосно щтан- гам 14 и закрепленные на корпусах механических рук 12. Привод выдвижения каждой механической руки 12 выполнен в виде силового цилиндра 18, шток 19 которого связан с траверсой 15 (выходным элементом), несущей захватное устройство 13, посредством компенсирующего узла 8.
На основании 1 размещена система 20 подготовки и подвода сжатого воздуха к приводам промышленного робота.
Компенсирующий узел 8 выполнен в виде шариков 21 и 22, двух опор 23 и 24, первая 23 из которых жестко связана с соответствующим щтоком 6 и 19 силового цилиндра 5 и 18 приводов подъема колонны и выдвижения механических рук 12 и имеет центральное отверстие, образованное корпусом 25 и планкой 26, расположенной между корпусом 25 и крышкой 27 первой опоры, а вторая опора 24 жестко связана с выходным элементом соответственно с кареткой 7 и траверсами 15 и ее средняя часть размещена в центральном отверстии
5
первой опоры 23. Шарики 21 и 22 установлены в эластичных сепараторах 28, закрепленных в корпусе 25 первой опоры 23 по обе стороны от средней части второй опоры, 24, и взаимодействуют поочередно со средней частью второй опоры 24, так при выдвижении штоков 6 и 19 шарик 22 через планку 26 и крышку 27 первой опоры 23 воздействует на вторую опору 24, связанную с кареткой 7 или траверсами 15, а при втягивании штоков 6 или 19 шарик 21 через корпус 25 первой опоры 23 воздействует на вторую опору 24.
Промышленный робот работает следующим образом.
Последовательность работы исполнительных механизмов промышленного робота определяется технологическим процессом изготовления детали. От системы программного управления (не показана) поступают уп,. равляющие сигналы, обеспечивающие движение захватных устройств 13 с заготовками. При этом привод 4 поворота осуществляет совместный поворот захватных устройств 13 вокруг вертикальной оси, привод 3 подъема - совместный подъем и опускание, а механические руки 12 - автономное перемещение каждого захватного устройства 13 вперед и назад. При подъеме и выдвижении рук 12 для повышения надежности в работе силовых цилиндров 5 и 18 их штоки 6 и 19 связаны соответственно с кареткой 7 и с траверсой 15 через компенсирующий узел 8. При этом при отклонении от совмещения осей штоков 6 и 19 силовых цилиндров, полученном при обработке деталей илл в процессе работы, ща- рики 21 и 22 перемещаются в различных
5 направлениях и корпус 25 с крышкой 27 и планкой 26 первой опоры 23 занимают нужное положение относительно второй опоры 24. Штоки 6 и 19 совершают строго прямолинейное перемещение.
Q Упругая связь в виде пружины сжатия 10, связанной с основанием 1, обеспечивает уравновешивание механических рук 12 с колонной 2, что уменьшает нагрузки на силовые цилиндры и этим улучшает их динамические характеристики. А уп5 ругая связь в виде пружины 17 сжатия жестко закреплена на корпусах механических рук 12, связанных с перемещаемыми штангами 14 через регулируемые упоры 16, повышает быстродействие перемешаемых захватных устройств 13 при горизонтальном пе0 ремещении.
Формула изобретения
0
Промышленный робот, содержащий основание, установленную на нем колонну, несущую механические руки с захватными устройствами, и приводы выдвижения механических рук и подъема колонны, имеющие силовые цилиндры, штоки которых связаны с выходными элементами соответственно захватными устройствами и кареткой колонны, отличающийся тем, что, с целью улучшения динамических характеристик путем уменьшения нагрузок на силовые цилиндры, каждый силовой цилиндр снабжен компенси- руюшим узлом, выполненным в виде двух опор, первая из которых закреплена на штоке силового цилиндра и имеет центральное отверстие, а вторая опора закреплена на выходном элементе и ее средняя часть расположена в центральном отверстии первой опоры, и шариков, размещенных в эластичных сепараторах, закрепленных в корпусе первой опоры по обе стороны от средней части второй опоры.
Фиг.1
15
13
ВидД
±5
Фиг. 2
Фиг.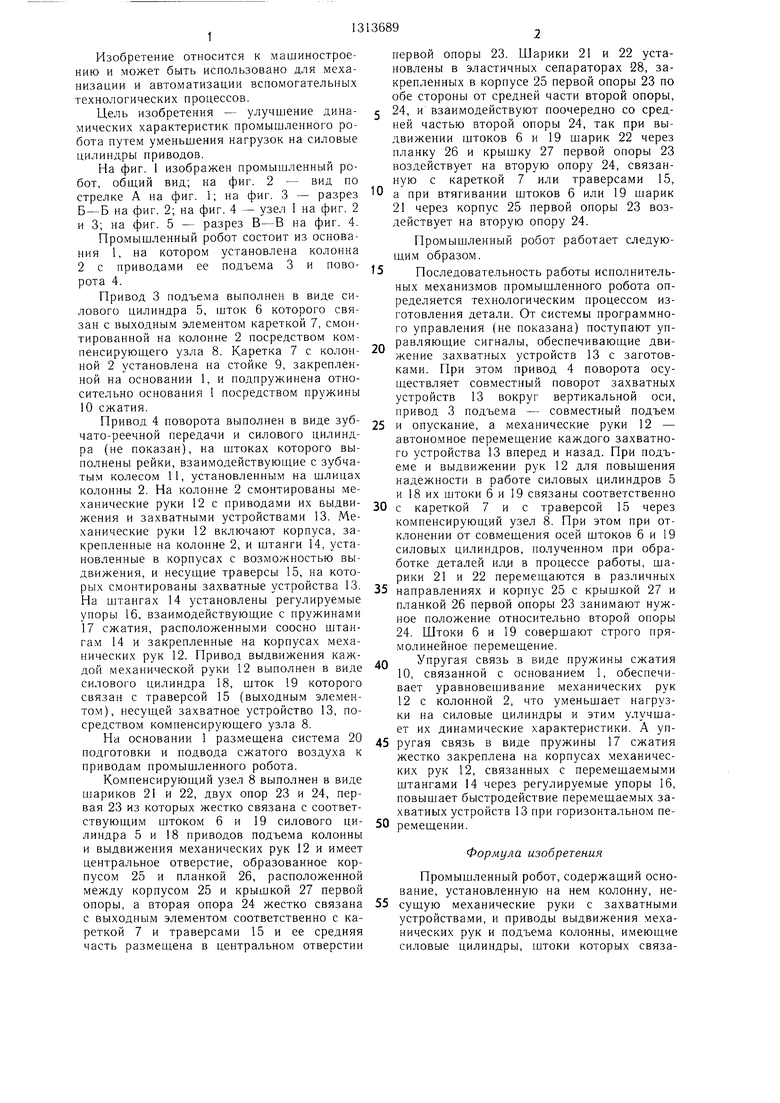
| название | год | авторы | номер документа |
|---|---|---|---|
| Робот к листоштамповочному прессу | 1988 |
|
SU1542672A1 |
| Промышленный робот | 1980 |
|
SU965761A1 |
| Промышленный робот | 1980 |
|
SU931462A1 |
| Промышленный робот | 1980 |
|
SU880713A1 |
| Автоматизированный комплекс для листовой штамповки | 1979 |
|
SU774722A1 |
| Промышленный робот | 1980 |
|
SU876415A1 |
| Промышленный робот | 1982 |
|
SU1125127A1 |
| Промышленный робот | 1985 |
|
SU1281402A1 |
| Промышленный робот | 1979 |
|
SU770785A1 |
| Промышленный робот | 1987 |
|
SU1481057A1 |
Изобретение относится к машиностроению и может быть использовано для .механизации и автоматизации вспо.могательных технологических процессов. Целью изобретения является улучшение дина.мических характеристик за счет уменьшения нагрузок на силовые цилиндры приводов. Это достигается тем, что штоки 6 и 19 силовых цилиндров приводов подъе.ма 4 и выдвижения механических рук 12 связаны соответственно с кареткой 7 колонны 2 и траверсами 15, несушими захватные устройства 13, посредством компенсирующих узлов 8, позволяюших компенсировать отклонения осей штоков 6 и 19 силовых цилиндров, возникаюпхие в процессе эксплуатации промышленного робота. 5 ил. /Э 77 15 10 ipus. 3 (Л 00 со с 00 CD 8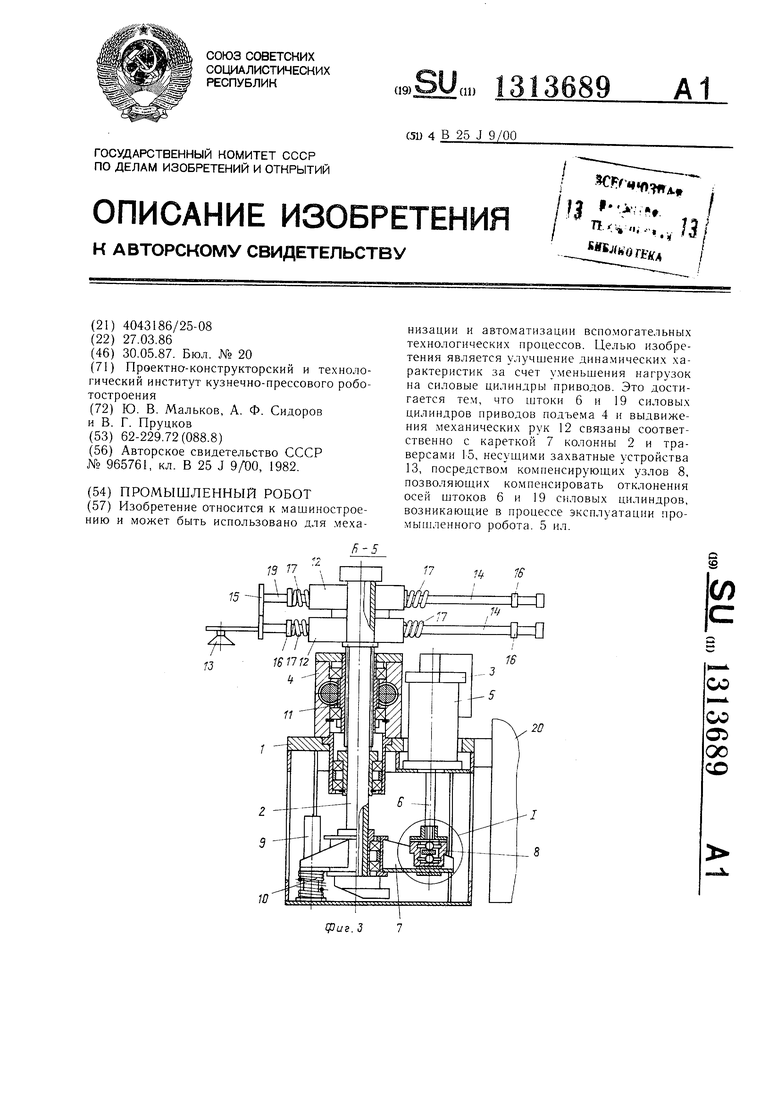
BJ9
Составитель А. Ширяева
Редактор Л. Пчелинская Техред И. ВересКорректор М Пожо
Заказ 2169/17Тираж 954Подписное
ВНИИПИ Государственного комитета СССР по делам изобретений и открытий
113035, Л1оеквс1, Ж-35, Раушская наб., д. 4/5 Производственно-полиграфическое преднриятие, г. Ужгород, ул. Проектная. 4
| Промышленный робот | 1980 |
|
SU965761A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
