Изобретение относится к машино- 10 троению, а именно к промышленным оботам для автоматической загрузки еталлорежущих станков.
Цель изобретения - расширение тех ологических возможностей за счет ис- 15 пользования в промышленных роботах с числовым программным управлением, где перемещение рабочих органов манипулятора осуществляется по строго запрограммированным точкам. 20
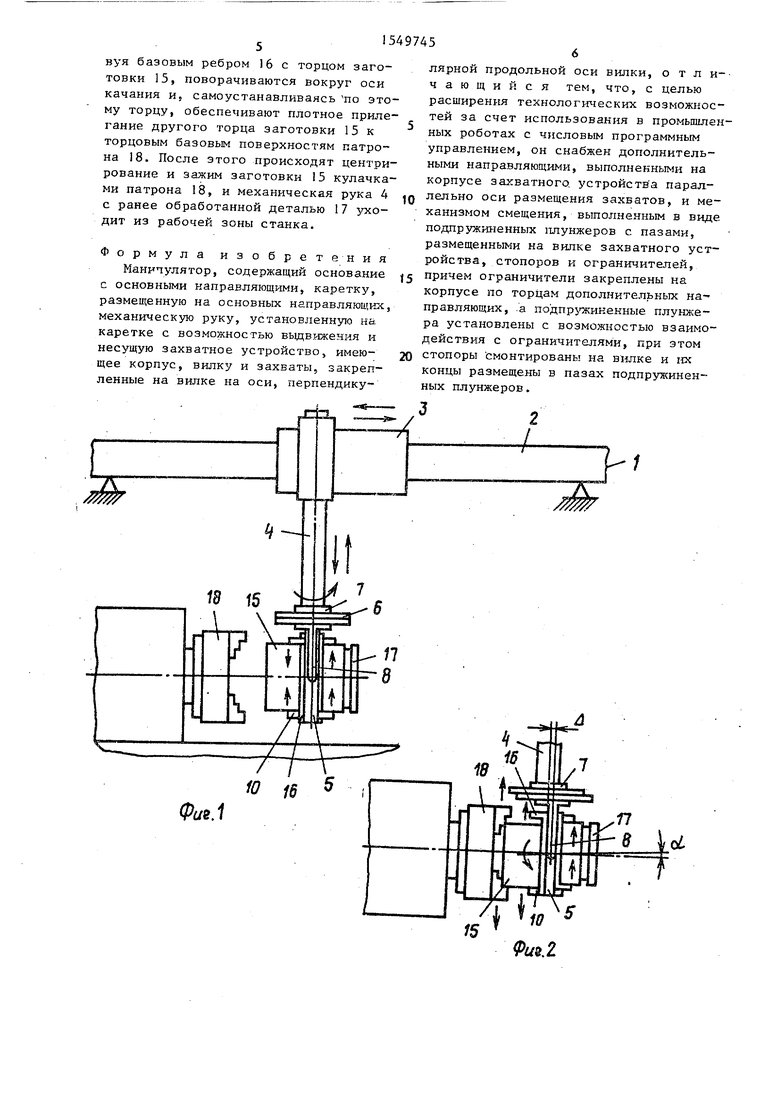
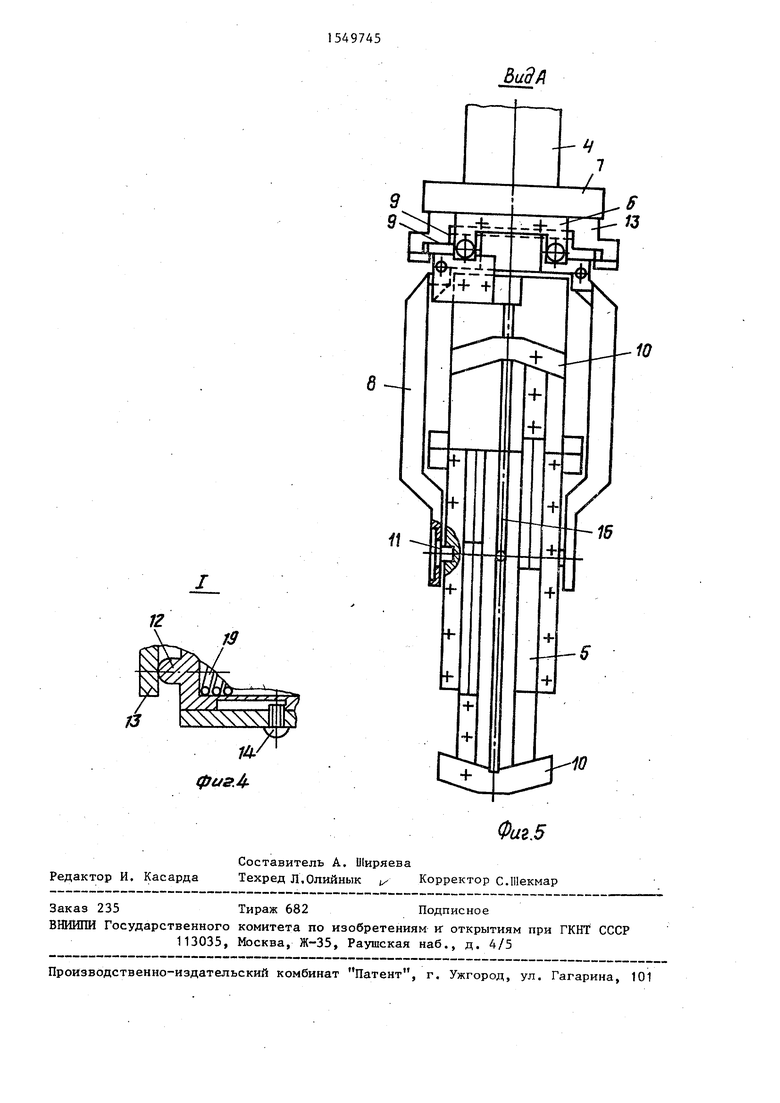
На фиг. 1 изображен манипулятор, общий вид; на фиг. 2 - момент передачи заготовки из захвата в патрон стан- ка; на фиг. 3 - двухпозиционное захватное устройство, общий вид} на 25 фиг. 4 - узел I на фиг. 3; на фиг.5 - вид А на фиг. 3.
Манипулятор содержит основание 1 в виде портала с основными направляющими 2, на которых установлена карет зо ка 3 с Механической рукой 4 (фиг. 1), имеющей возможность выдвижения. На конце механической руки 1 установлено двухпозиционное захватное устройство 5 с возможностью поворота вокруг 35 оси механической руки 4 на 180°. Захватное устройство 5 состоит из корпуса 6, жестко связанного с поворотным фланцем 7, размещенным на механической руке 4, вилки 8, установлен- о ной на дополнительных направляющих 9, выполненных на корпусе 6, двух захватов, размещенных на вилке 8, и механизма смещения. Каждый из двух захватов выполнен в виде пары симмет- 45 рично расположенных зажимных губок 10 и установлен на вилке 8 с возможностью свободного или подпружиненного кача- ния на цапфах 11 (фиг. 3), расположенных на оси, перпендикулярной оси . симметрии зажимных губок 10, а также с возможностью смещения в направлении, поперечном оси механической руки 4 и совпадающем с направлением перемещения каретки 3. Механизм смещения со55
стоит из двух подпружиненных плунже-( ров 12 с пазами, размещенных на вилке 8, ограничителей 13, смонтированных на корпусе 6 по торцам дополни0
5 0
5
о 5 о 5 .
5
тельных направляющих 9, и стопоров 14. Причем концы последних размещены в пазах подпружиненных плунжеров 12.
Угол качания (фиг. 2) захватов по величине учитывает максимально возможный угол непараллельности торцов заготовки 15, а смещение захватов - максимально возможное отклонение заготовки по ширине. Для того, чтобы усилие воздействия захватов на заготовку 15 было сосредоточено на оси заготовки, ка торцовой поверхности загружающего (разгружающего) захвата выполнено базовое ребро 16 с расположением по оси захвата.
Перемещения каретки 3, механической руки 4 и поворот захватного устройства 5 осуществляются от соответствующих приводов (не показаны). При этом, как минимум, привод каретки 3 является приводом с ЧПУ и работает в следящем режиме.
Манипулятор работает следующим образом.
После того, как манипулятор с зажатой в одном из захватов очередной заготовкой 15, взятой предварительно из накопительного устройства, приходит в рабочую зону станкаs перемещением механической руки 4 вниз захваты устанавливаются на ось центров станка. Далее вторым (свободным) захватом производится удаление обработанной детали 17 из патрона 18 станка, после чего захваты поворачиваются на угол 180°, и заготовка 15 располагается напротив патрона 18.
Затем перемещением каретки 3 заготовка вводится в патрон- 18. При этом перемещение каретки 3 программируется на величину, обеспечивающую перекрытие минимально возможной ширины заготовки, в результате чего происходит смещение захватов и включаются в действие пружины 19 подпружиненных плунжеров 12.
После останова каретки 3 в запрограммированной точке происходит разжим заготовки 15 в захвате, и захваты под действием пружин 19, взаимодействуя базовым ребром 16 с торцом заготовки 15, поворачиваются вокруг оси качания и} самоустанавливаясь по этому торцу, обеспечивают плотное прилегание другого торца заготовки 15 к торцовым базовым поверхностям патрона 18. После этого происходят центрирование и зажим заготовки 15 кулачками патрона 18, и механическая рука 4 с ранее обработанной деталью 17 уходит из рабочей зоны станка.
Формула изобретения Манипулятор, содержащий основание с основными направляющими, каретку, размещенную на основных направляющих, механическую руку, установленную на каретке с возможностью выдвижения и несущую захватное устройство, имеющее корпус, вилку и захваты, закрепленные на вилке на оси, перпендикулярной продольной оси вилки, отличающийся тем, что, с целью расширения технологических возможностей за счет использования в промышленных роботах с числовым программным управлением, он снабжен дополнительными направляющими, выполненными на корпусе захватного устройства параллельно оси размещения захватов, и механизмом смещения, выполненным в виде подпружиненных плунжеров с пазами, размещенными на вилке захватного устройства, стопоров и ограничителей,
причем ограничители закреплены на корпусе по торцам дополнительных направляющих, а подпружиненные плунжера установлены с возможностью взаимодействия с ограничителями, при этом
0 стопоры смонтированы на вилке и их концы размещены в пазах подпружиненных плунжеров.
| название | год | авторы | номер документа |
|---|---|---|---|
| Промышленный робот | 1982 |
|
SU1125127A1 |
| Устройство для автоматической смены инструмента и инструментальных головок на металлорежущем станке | 1987 |
|
SU1481026A1 |
| Автооператор для автоматической смены инструмента | 1984 |
|
SU1255371A1 |
| Манипулятор | 1985 |
|
SU1313691A1 |
| Устройство для автоматической смены инструмента | 1983 |
|
SU1135593A1 |
| Робот | 1991 |
|
SU1781026A1 |
| Загрузочно-разгрузочное устройство к горизонтальному поворотному столу | 1984 |
|
SU1180226A1 |
| Робот к штамповочному прессу | 1982 |
|
SU1127674A1 |
| Устройство для загрузки металлорежущего станка | 1986 |
|
SU1360967A1 |
| МАНИПУЛЯТОР | 2002 |
|
RU2228259C2 |
Изобретение относится к машиностроению, а именно к промышленным роботам для автоматической загрузки металлорежущих станков. Целью изобретения является расширение технологических возможностей манипулятора путем обеспечения возможности применения его на промышленных роботах с числовым программным управлением, где перемещение рабочих органов манипулятора осуществляется по строго запрограммированным точкам. Это достигается тем, что загрузка заготовок с помощью манипулятора с цикловой системой управления в патрон станка осуществляется его механической рукой 4 с захватным устройством 5. Установка захватов с возможностью смещения вдоль оси станка посредством механизма смещения в виде подпружиненных плунжеров, ход которых ограничен стопорами 14 и раен мааксимально возможному отклонению заготовок по ширине, обеспечивает компенсацию отклонений размеров заготовки без изменения программы управления манипулятором. 5 ил.
{ 40 Pus.2
ВиЭА
6 13
| Устройство для загрузки металлорежущего станка | 1977 |
|
SU722732A1 |
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
