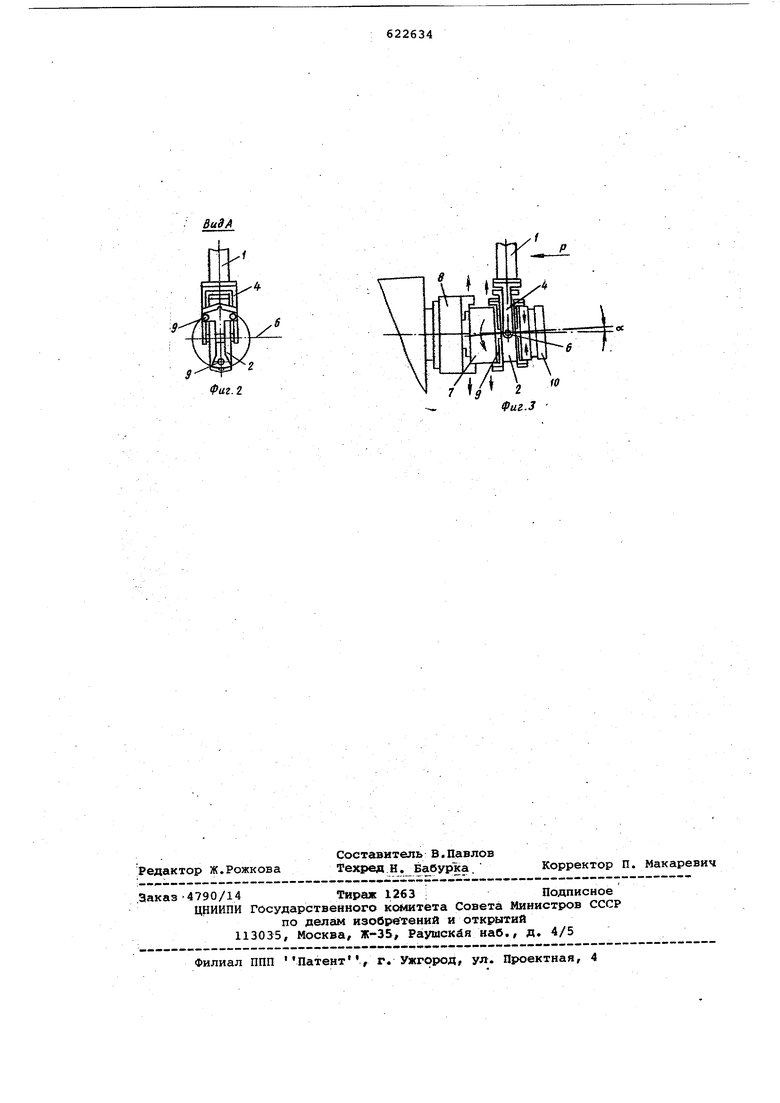
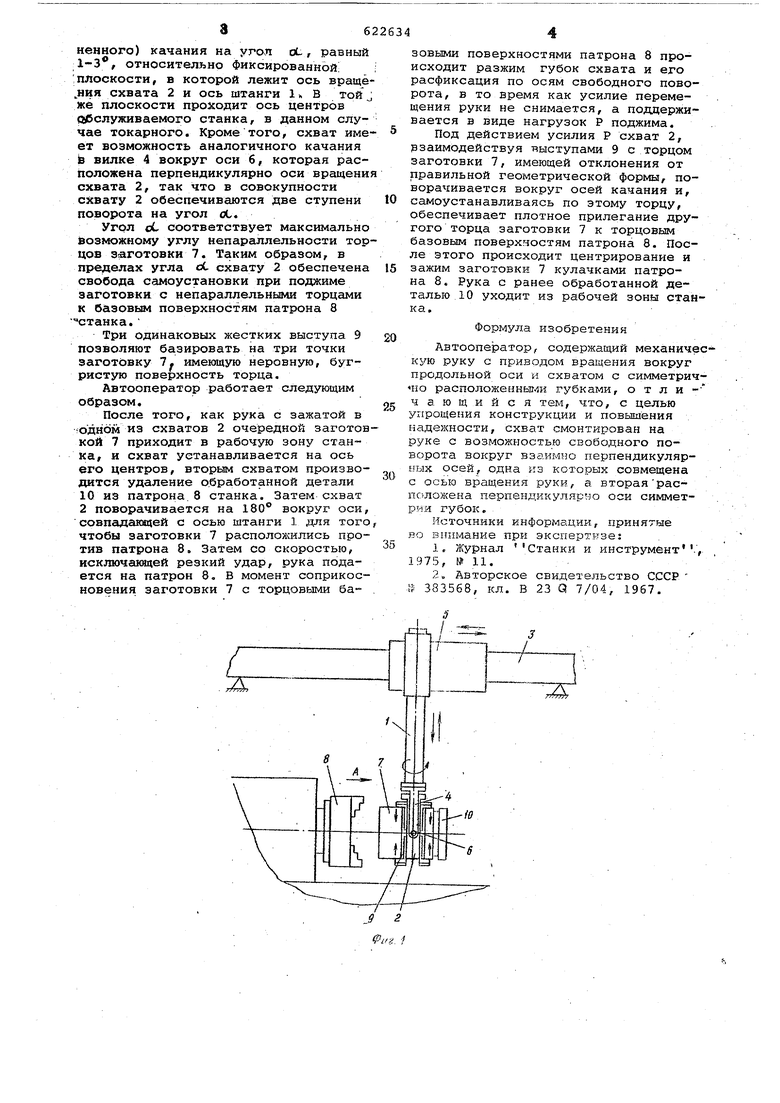
(54) АВТООПЕРАТОР 36 ненного) качания на угол оС-, равный 1-3, относительно Фиксированной ;плоскости, в которой лежит ось вращё ,ния схвата 2 и ось штанги , В той же плоскости проходит ось центров выслуживаемого станка, в данном случае токарного. Кроме того, схват име ет возможность аналогичного качания 1з вилке 4 вокруг оси 6, которая расположена перпендикулярно оси вращени схвата 2, так что в совокупности схвату 2 обеспечиваются две ступени поворота на угол оС. Угол cL соответствует максимально возможному углу непараллельности тор цов заготовки 7. Таким образом, в пределах угла cL схвату 2 обеспечена свобода самоустановки при поджиме заготовки с непараллельными торцами к базовым поверхностям патрона 8 станка. Три одинаковых жестких выступа 9 позволяют базировать на три точки заготовку 7. имеющую неровную, бугристую поверхность торца. Автооператор работает следующим образом. После того, как рука с зажатой в одном из схватов 2 очередной заготов кой 7 приходит в рабочую зону станка, и схват устанавливается на ось его центров, вторым схватом производится удаление обработанной детали 10 из патрона.8 станка. Затем схват 2 поворачивается на 180° вокруг оси совпаданадей с осью штанги 1 для того чтобы заготовки 7 расположились против патрона 8. Затем со скоростью, исключающей резкий удар, рука подается на патрон 8, В момент соприкосновения заготовки 7 с торцовыми ба зовыми поверхностями патрона 8 происходит разжим губок схвата и его расфиксация по осям свободного поворота, в то время как усилие перемещения руки не снимается, а поддерживается в виде нагрузок Р поджима. Под действием усилия Р схват 2, эзаимодействуя выступами 9 с торцом заготовки 7, имеющей отклонения от правильной геометрической формы, поворачивается вокруг осей качания и, самоустанавливаясь по этому торцу, обеспечивает плотное прилегание другого торца заготовки 7 к торцовым базовым поверхностям патрона 8. После этого происходит центрирование и зажим заготовки 7 кулачками патрона 8. Рука с ранее обработанной деталью, 10 уходит из рабочей зоны станка. Формула изобретения Автооператор, содержащий механическ ю руку с приводом вращения вокруг продольной оси и схватом с симметрично расположеЕШыг и губками, о т л и - чающийся тем, что, с целью упроще 1ия конструкции и повышения надежности, схват смонтирован на руке с возможностью свободного поворота вокруг взаимно перпендикулярных осей, одна из которых совмещена с осью вращения руки, а втораяраспс ложена перпендикулярно оси симметрии губок. Источники информации, принятые но внимание при экспертизе: 1.Журнал Станки и инструмент .,. 1975, 11. . 2,Авторское свидетельство СССР № 383568, кл. В 23 Q 7/04, 1967.
Фаг.2
to
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор | 1987 |
|
SU1549745A1 |
| Автооператор | 1984 |
|
SU1191256A1 |
| Промышленный робот | 1982 |
|
SU1125127A1 |
| Гибкий производственный модуль | 1987 |
|
SU1541017A1 |
| Устройство для загрузки металлорежущего станка | 1977 |
|
SU722732A1 |
| Автооператор | 1979 |
|
SU837755A1 |
| Гибкий производственный модуль | 1989 |
|
SU1754421A2 |
| Робототехнический комплекс | 1986 |
|
SU1425036A1 |
| Гибкий производственный модуль | 1988 |
|
SU1673395A1 |
| Устройство загрузки станков | 1978 |
|
SU691275A1 |