113
изобретение относится к устройствам числового программного управления автоматизированным сборочно-мон- тажным оборудованием и может быть использовано для управления металлорежущими станками и двухкоординатны- ми системами в различных устройствах программного управления.
Цель изобретения - повышение быстродействия интерполятора и точности интерполирования.
На чертеже показана блок-схема предлагаемого цибоового линейного интерполятора,
Цифровой линейный интерполятор содержит вход 1 записи Х-координаты, вход 2 запуска интерполятора, вход
3записи у-координаты, входную шину
4задания конечных координат интерполяции, регистр 5 задания Х-координаты, регистр 6 задания Y-координа- ты, реверсивный счетчик 7 Х-координаты, первый цифроаналоговый преобразователь 8, реверсивный счетчик 9 Y- координатЬ, второй цифроаналоговый преобразователь 10, первый преобразователь 11 напряжение - частота, второй преобразователь 12 напряжение - частота, выходы интерполятора 13-15, элемента И 16.
Устройство работает следующим образом.
Из устройства управления через входную шину 4 задания конечных коор дина:т интерполяции на входы регистра
5Х-координаты и регистра 6 Y-коор- динаты поступает двоичный код конечных координат интерполяции, который вписывается в регистр 5 Х-координаты и реверсивньш двоичный счетчик 7 X- координаты сигналом Загрузка Х, поступающим на вход 1 интерполятора из устройства управления. Двоичный код конечных координат интерполяции также вписывается в регистр 6 Y-коор динаты и реверсивный двоичный счетчик 9 Y-координаты сигналом Загрузка Y, поступающим на вход 3 интерполятора из устройства управления. На выходе первого цифроаналогового преобразователя 8 появляется напряжение, пропорциональное двоичному коду конечной координаты перемещения по оси X, а на выходе второго цифро- аналогового преобразовател:я 10 появляется напряжение, пропорциональное двоичному коду конечной координаты перемещения по оси Y. При поступлении
2
из устройства управления сигнала Пуск на вход 2 интерполятора разрешается работа преобразователей 11 и 12 напряжение - частота. На выходе
первого преобразователя 11 напряжение - частота появляются импульсы с частотой, прямо пропорциональной
заданному двоичному коду перемещения по Х-координате, которые поступают
на коммутатор фаз Х-координаты (на чертеже не показан) через выход 13 интерполятора и на вычитающий вход реверсивного двоичного счетчика 7 Х-координатьь На выходе второго преобразователя 12 напряжение - частота появляются импульсы с частотой, прямо пропорциональной заданному в регистре 6 Х-координаты двоичному коду перемещения по Y-координате, которые
-поступают на коммутатор фаз Y-координаты (на чертеже не показан) через выход 14 интерполятора и на вычитающий вход реверсивного двоичного счетчика 9 Y-координаты. Так как преобразователи напряжение - частхэта обладают линейностью в заданнбм диапазоне изменения частот, то оба двигателя достигнут конечной точки интерполирования за одинаковое время.
При обнулени реверсивных двоичных счетчиков 7 и 8 на их выходах появляются сигналы заема, которые останавливают работу соответствующих преобразователей напряжение - частота и поступают на входы элемента И 16, на выходе которого, при условии окончания работы обоих двигателей, появляется сигнал Конец интерполяции, которьм через выход 15 интерполятора поступает в устройство управления. Устройство управления снимает команду Пуск, и интерполятор вновь готов к работе.
Применение предлагаемого цифрового линейного интерполятора в системах управления автоматизированным сборочно-монтажным оборудованием позволяет повысить производительность работы оборудования за счет сокращения времени на вспомогательные опера- ции (транспортирование двухкоординат- ного стола или монтажной установочной головки). Конструкция интерполятора цроста и позволяет реализовать схему в интегральном исполнении, а принцип управления интерполятором озволяет использовать его в распре3131
деленных системах управления с шинной структурой.
Формула изобретения
Цифровой линейный интерполятор, ,содержащий в канале каждой координаты цифроаналоговый преобразовате,пь и преобразователь напряжение - частота, отличающийся тем, что, с целью повышения быстродействия и точности интерполирования устройства, в него введены элемент И и в канал каждой координаты - регистр задания и реверсивньй счетчик, выход заема которого подключен к установочному входу преобразователя напряжение - частота и,к соответствующему входу
Составитель И.Швец Редактор Т.Парфенова Техред Л.Олийнык
Заказ 2422/42 Тираж 863Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
4
элемента И, выход которого подключен к выходу Конец интерполяции, выход преобразователя напряжение - частота соединен с минусовым входом реверсивного счетчика и с выходом своей координаты, пусковой вход - с входом Запуск цифрового линейного интерполятора, а информационный вход с выходом цифроаналогового преобразователя, вход которого соединен с выходом регистра задания и с информационный входом реверсивного счетчика, вход записи которого подключен к входу записи регистра задания
и к входу цифрового линейного интерполятора, вход задания которого соединен с информационным входом регист- ра задания.
Корректор И.Муска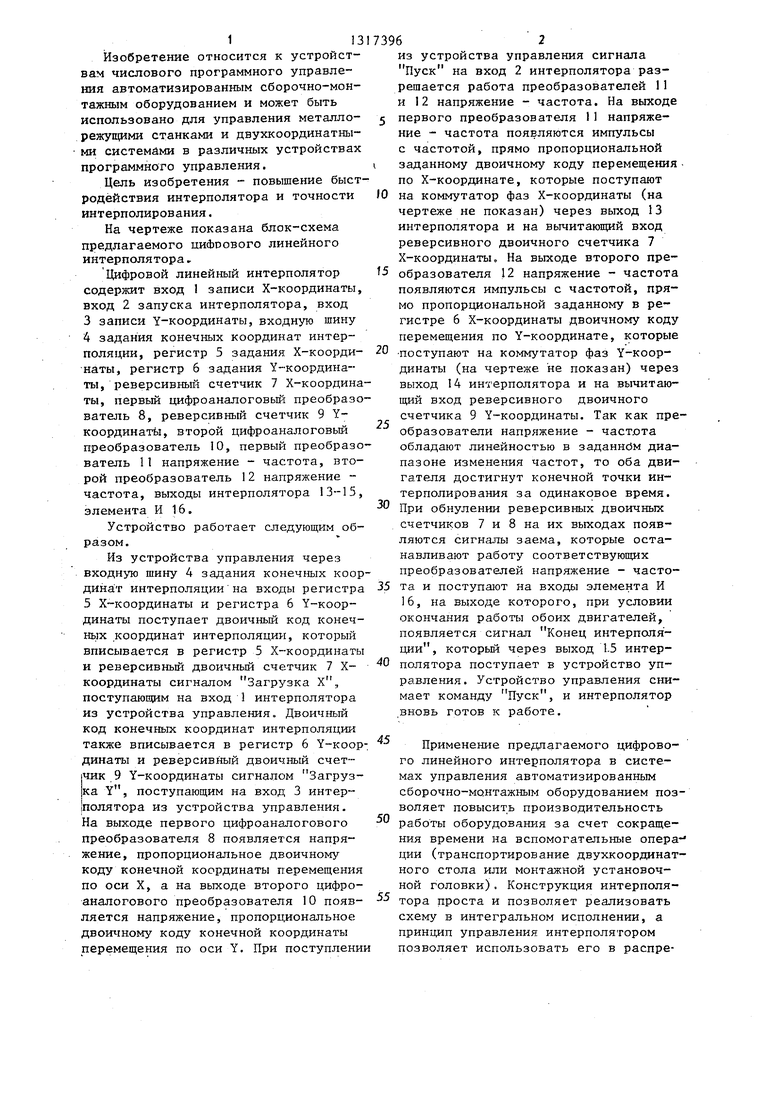
| название | год | авторы | номер документа |
|---|---|---|---|
| Цифровой круговой интерполятор | 1985 |
|
SU1327064A1 |
| Цифровой линейный интерполятор | 1989 |
|
SU1615744A2 |
| Устройство для двухкоординатного управления рабочим органом | 1990 |
|
SU1815620A1 |
| Многоканальный функциональный генератор | 1984 |
|
SU1191922A1 |
| Цифровой интерполятор | 1984 |
|
SU1238033A1 |
| Многокоординатный цифровой интерполятор | 1986 |
|
SU1315939A1 |
| Устройство для двухкоординатногоупРАВлЕНия Об'ЕКТОМ | 1979 |
|
SU853610A1 |
| Цифровой линейный интерполятор | 1987 |
|
SU1434406A1 |
| Цифровой линейный интерполятор | 1991 |
|
SU1807450A1 |
| Линейный интерполятор | 1989 |
|
SU1674064A1 |
Изобретение относится к устройствам числового программного управления автоматизированным сборочно-мон- тажным оборудованием я может быть использовано для управления металлорежущими станками и двухкоординатны- ми системами в различных устройствах программного управления. Цель изобретения - повьшения быстродействия устройства и точности интерполирования. Интерполятор содержит вход 1 записи Х-координаты, вход 2 запуска интерполятора, вход 2 записи Y-координаты, , входную шину 4 задания конечных координат интерполяции, регистр 5 Х-координаты, регистр 6 Y-координаты, ре- - версивный двоичный счетчик 7 Х-координаты, первый цифроаналоговый преобразователь 8, реверсивный двоичный счетчик 9 Y-координаты, второй цифро- аналоговый преобразователь 10, первый преобразователь I1 напряженке - частота, второй преобразователь 12 напряжение - частота, выход 13-15 интерполятора, элемент И 16. За счет использования преобразователей напряжение - частота и цифроаналоговых преобразователей достигается повышение быстродействия, а благодаря имею- щейся структуре управления интерполятором появляется возможность использовать интерполятор в децентрализованных системах управления с шинной структурой. 1 ил. (Л СдЭ СО о О)
| Цифровой линейный интерполятор | 1975 |
|
SU551611A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Линейный интерполятор | 1979 |
|
SU993210A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
