Изобретение относится к средствам механизации возведения шахтной крепи, например секционной.
Целью изобретения является повышение производительности работ по установке секционной крепи.
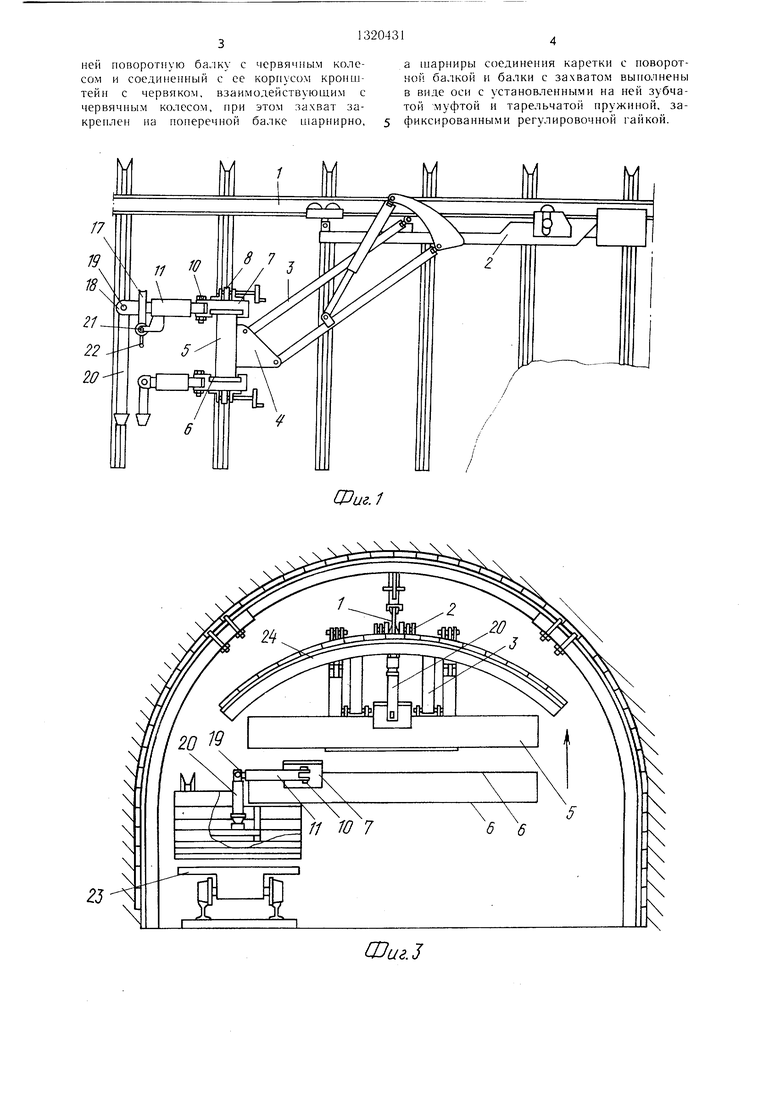
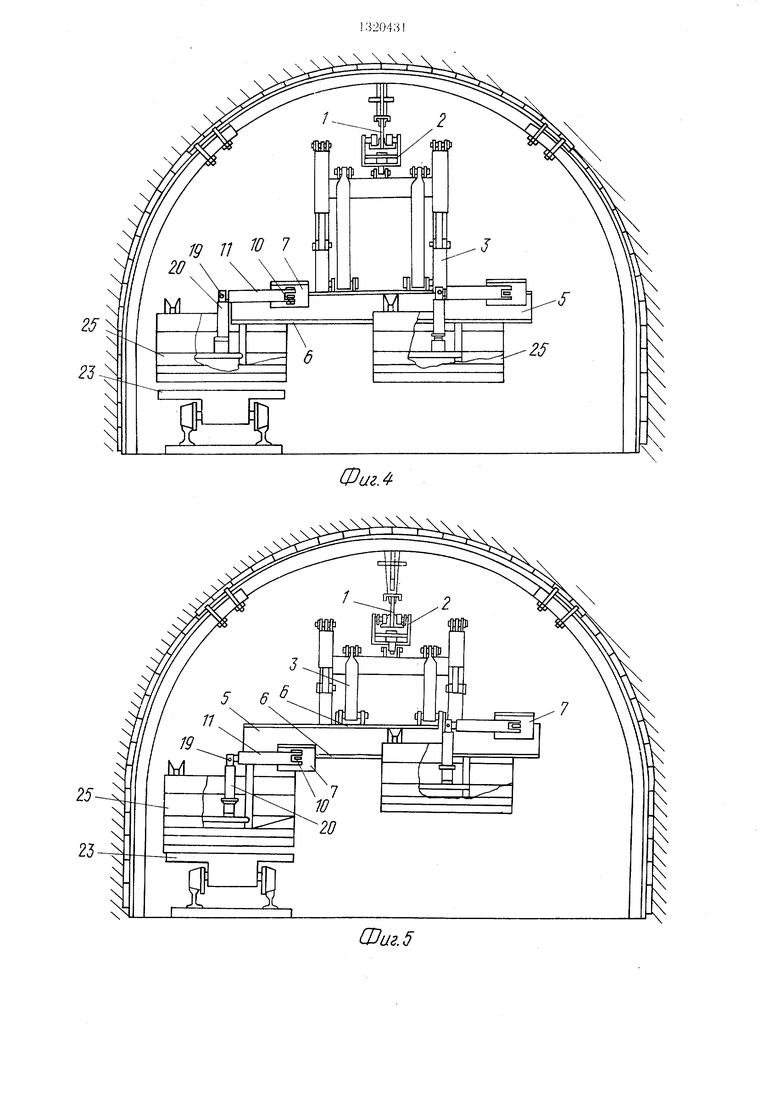
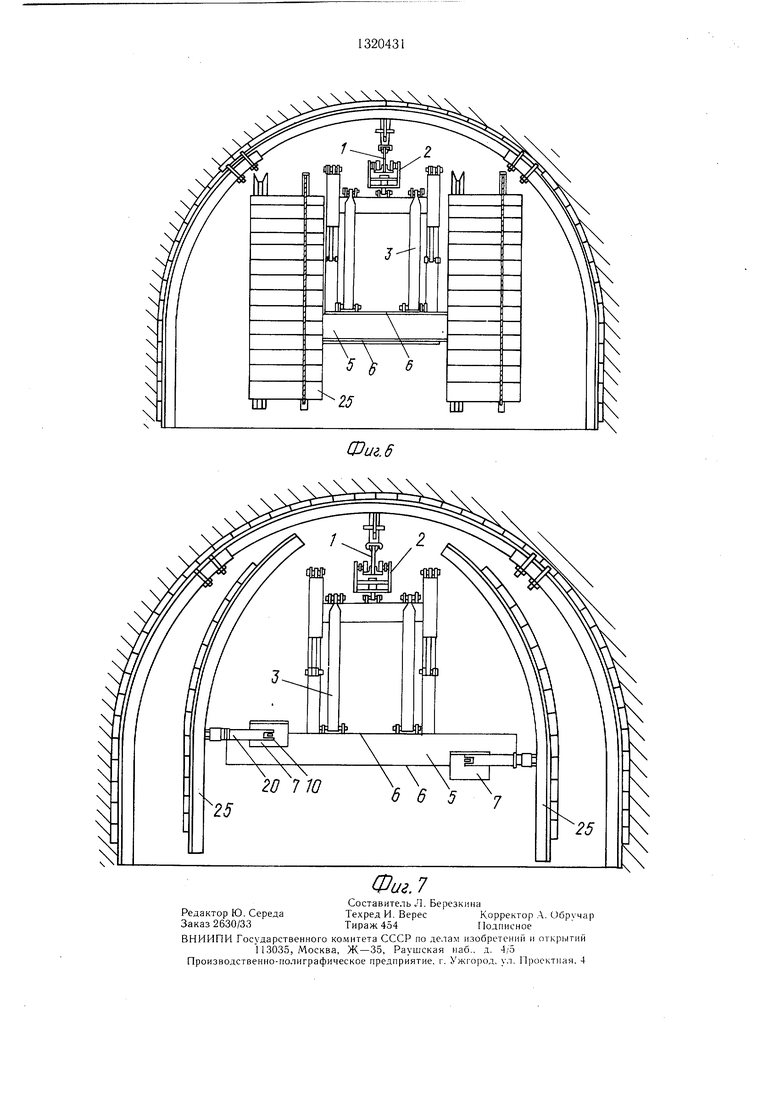
На фиг. 1 изображен крепеукладчик, общий вид; на фиг. 2 - стабилизатор подъемного механизма; на фиг. 3 - разгрузка и установка в проектное положение верхней секции крепи; на фиг. 4 - разгрузка первой боковой секции крепи; на фиг. 5 - разгрузка второй боковой секции крепи; на фиг. 6 - установка боковых секций крепи в вертикальное положение; на фиг. 7 - то же., в проектное положение.
Крепеукладчик передвигается по монорельсовому пути 1 и имеет ходовую тележку 2, подъемный .механизм 3, выполненный из звеньев, шарнирно соединенных в параллелограмм, и стабилизатор 4 подъемного механизма. Стабилизатор 4 выполнен в виде поперечной балки 5 с верхними и нижни- .ми направляющими 6 и захватом, в которых расположены подвижные каретки 7. К верхним и нижним поверхностям кареток 7 прикреплены зубчатые колеса 8, а к направляющим 6 - зубчатые рейки 9. К боковым частям кареток 7 с помопдью осей 10 присоединены поворотные балки 11, при этом на осях 10 находятся зубчатые муфты 12 и тарельчатые пружины 13, зафиксированные регулировочной гайкой 14. Кроме того, между муфтами 12 и кронштейнами 15 поворотных балок 11 установлены шпонки 16. К поворотным балкам 11 прикреплены червячные колеса 17 и кронштейны 18, к которым с помощью осей 19 присоединены захваты 20 балки 5. К поворотной балке 11 прикреплен на кронштейне червяк 21 с рукояткой 22. Конструкция шарнирного соединения захвата 20 с кронщтейном 18 аналогична соединению поворотной балки 11 с
10
го механизма 3 захват 20 устанавливают по центру верхней секции 24 и вводят в нее перемещением каретки 7, которое осуществляют вращением зубчатого колеса 8. Пос5 ле этого верхнюю секцию 24 подъемным механизмом 3 приподнимают над платформой 23, захват 20 поворачивают вокруг оси 19 на 90° и далее кареткой 7 верхнюю секцию 24 перемещают к центру выработки, где ее устанавливают на почву. Балку 11 поворачивают вокруг оси 10 на 90°, которая при этом займет положение продольной оси выработки, а захват 20 посредством червячной передачи устанавливают вертикально по отношению к кровле выработки. В таком
15 положении захват 20 снова вводят в верхнюю секцию 24, которую затем механизмом 3 подъема поднимают над почвой выработки и транспортируют к забою, где устанавливают на выдвижные консоли.
После уборки горной массы крепеукладчик подгоняют к платформе 23 с боковыми секциями крепи 25. Посредством червячной передачи захват 20 устанавливают вертикально по отношению к почве выработки,
25 а балку 11 выводят на линию, перпендикулярную стенкам выработки. Далее с помощью ходовой тележки 2, подъемного механизма 3 и каретки 7, захват 20 устанавливают над первой боковой секцией крепи 25 и захватывают ее, после чего секцию при30 поднимают над платформой 23 и кареткой 7 транспортируют по балке 5 к противоположной стенке выработки. Таким же образом осуществляют захват второй боковой секции крепи 25, после чего обе секции устанавливают в вертикальное положение путем вращения рукоятками 22 червячных передач балок 11, при этом оба захвата 20 расположены в горизонтальной плоскости. Далее захваты 20 совместно с узлами 11 поворота выводят на линию, перпендикулярную
35
кареткой 7 и также имеет зубчатые муфты, 40 стенкам выработки, боковые секции транстарельчатые пружины и регулировочные гайки. Настройку зубчатых муфт 12 при помощи тарельчатых пружин 13 осуществляют прижатием регулировочных гаек 14, исключающих самопроизвольное вращение балок 11 и захватов 20 вокруг осей 10 и 19.
Крепеукладчик работает следующим образом.
В призабойную зону доставляют платформы 23 с верхней секцией крепи 24 и боковыми секциями 25. Крепеукладчик по монорельсу 1 подгоняют к платформе 23 с верхней секцией крепи 24. Вращением рукоятки 22, посредством червяка 21 и червячного колеса 17 захват 20 устанавливают в горизонтальное положение, после чего совместно с балкой 11 выводят на линию, перпендикулярную стенкам выработки. Далее с помощью ходовой тележки 2 и подъемно0
го механизма 3 захват 20 устанавливают по центру верхней секции 24 и вводят в нее перемещением каретки 7, которое осуществляют вращением зубчатого колеса 8. После этого верхнюю секцию 24 подъемным механизмом 3 приподнимают над платформой 23, захват 20 поворачивают вокруг оси 19 на 90° и далее кареткой 7 верхнюю секцию 24 перемещают к центру выработки, где ее устанавливают на почву. Балку 11 поворачивают вокруг оси 10 на 90°, которая при этом займет положение продольной оси выработки, а захват 20 посредством червячной передачи устанавливают вертикально по отношению к кровле выработки. В таком
5 положении захват 20 снова вводят в верхнюю секцию 24, которую затем механизмом 3 подъема поднимают над почвой выработки и транспортируют к забою, где устанавливают на выдвижные консоли.
После уборки горной массы крепеукладчик подгоняют к платформе 23 с боковыми секциями крепи 25. Посредством червячной передачи захват 20 устанавливают вертикально по отношению к почве выработки,
5 а балку 11 выводят на линию, перпендикулярную стенкам выработки. Далее с помощью ходовой тележки 2, подъемного механизма 3 и каретки 7, захват 20 устанавливают над первой боковой секцией крепи 25 и захватывают ее, после чего секцию при0 поднимают над платформой 23 и кареткой 7 транспортируют по балке 5 к противоположной стенке выработки. Таким же образом осуществляют захват второй боковой секции крепи 25, после чего обе секции устанавливают в вертикальное положение путем вращения рукоятками 22 червячных передач балок 11, при этом оба захвата 20 расположены в горизонтальной плоскости. Далее захваты 20 совместно с узлами 11 поворота выводят на линию, перпендикулярную
5
портируют к забою, устанавливают в проектное положение и соединяют с верхней секцией крепи 24. По окончании процесса крепления захваты 20 отсоединяют от боковых секций, а крепеукладчик отводят от забоя.
Формула изобретения
Подъемный механизм крепеустановщи- ка, состоящий из шарнирно связанных в
параллелограмм звеньев и стабилизатора с захватом, отличающийся тем, что, с целью повышения производительности работ по установке секционной крепи, стабилизатор выполнен в виде поперечной балки с верхними и нижними направляющими и перемещающимися по ним посредством зубчато- реечной передачи каретками, каждая из которых имеет щарнирно соединенную с
ней поворотную балку с червячным колесом и соединенный с ее корпусом кронштейн с червяком, взаимодействующим с червячным колесом, при этом захват за- кренлен на поперечной балке ншрнирно.
а 1нарниры соединения каретки с поворот- h OH балкой и балки с захватом выполнены в виде оси с установленными на ней зубчатой муфтой и тарельчатой нружиной, зафиксированными регулировочной гайкой.
СРиг.1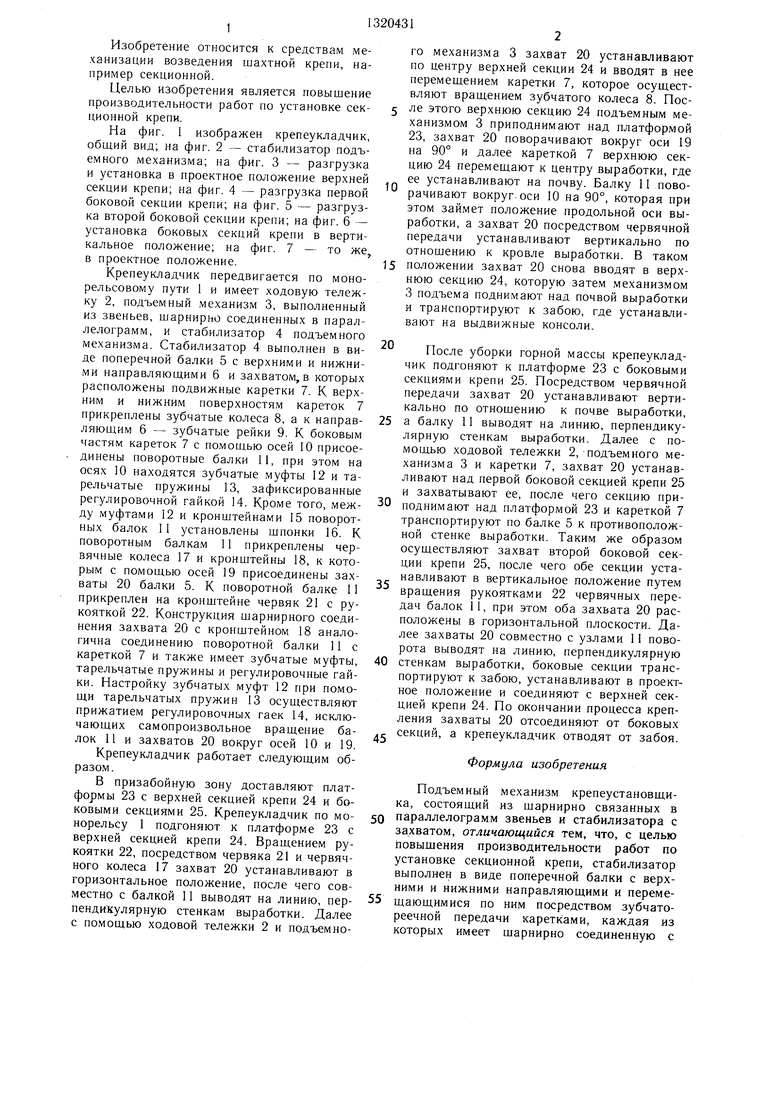
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ возведения элементов крепи выработок прямоугольного сечения | 1990 |
|
SU1779753A1 |
| Крепеукладчик | 1990 |
|
SU1774022A1 |
| Секция крепи прямоугольного сечения | 1990 |
|
SU1761959A1 |
| Крепеукладчик | 1988 |
|
SU1645537A1 |
| КРЕПЕУСТАНОВЩИК | 1995 |
|
RU2078935C1 |
| КОНВЕЙЕР ДЛЯ СПАСЕНИЯ ЛЮДЕЙ ПРИ ПОЖАРЕ | 2015 |
|
RU2615253C1 |
| Устройство для разгрузки и перемещения элементов крепи | 1982 |
|
SU1041696A1 |
| Способ возведения пешеходного перехода методом щитовой проходки | 1990 |
|
SU1828926A1 |
| Комплекс возведения сборной железобетонной крепи | 1986 |
|
SU1463929A1 |
| ГРУЗОПОДЪЕМНИК ПОГРУЗЧИКА | 2016 |
|
RU2611675C1 |
Изобретение относится к средствам механизации возведения шахтной крепи и повышает производительность работ по установке секционной крепи. Подъемный механизм 3 выполнен из шарнирно связанных в параллелограмм звеньев и стабилизатора 4 с захватом 20, закрепленным посредством оси 19. Стабилизатор 4 выполнен в виде поперечной балки 5 с верхними и ниж9 8 ними направляющими 6. По направляющим 6 посредством зубчатых колес 8 и реек 9 перемещаются каретки 7. Каждая из кареток 7 имеет связанную с ней осью 10 поворотную балку 11 с червячным колесом 17. На осях 10 установлены зубчатая муфта 12 и тарельчатая пружина 13, зафиксированные гайкой 14. С балкой 11 соединен кронштейн 18 с червяком 21, взаимодействующим с колесом 17. Посредством червяка 21 и колеса 17 захват 20 устанавливают в горизонтальное положение. Балка 11 выводится на линию, перпендикулярную стенкам выработки. Механизмом 3 захват 20 устанавливают по центру верхней секции. Затем верхнюю секцию приподнимают над платформой, а захват 20 поворачивают вокруг оси 19 на 90° и устанавливают вертикально. Балку 11 выводят на линию, перпендикулярную стенкам выработки. Механизмом 3 и кареткой 7 захват 20 устанавливают над первой боковой секцией и захватывают ее. После этого секцию приподнимают над платформой и кареткой 7 транспортируют по балке 5 к противоположной стенке выработки. 7 ил. 1Б 0 fz / 11 Л 579 1СП оо ьо о N со
// 10 7
,.jь
6
Фиг.
Фиг А
CD и г. 5
Фиг. 6
Редактор Ю. Середа Заказ 2630/33
Составитель Л. Березкииа
Техред И. ВересКорректор Л. Обручар
Тираж 454Подписное
ВНИИПИ Государственного комнтета СССР по делам нзобретснин и открытий
П 3035, Москва, Ж-35, Раушская наб., д. 4/5 Производствепно-полиграфическое предприятие, г. Ужгород, ул. Проектная. 4
Фиг. 7
| Крепеукладчик | 1979 |
|
SU848657A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
| Малевич Н | |||
| А | |||
| Горнопроходческие машины и комплексы | |||
| М.: Недра, с | |||
| Раздвижной паровозный золотник с подвижными по его скалке поршнями между упорными шайбами | 1922 |
|
SU148A1 |
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
