1
Изобретение относится к автоматическому управлению и регулированию и может быть использовано для управления электрическим напряжением, током, температурой, скоростью враще- ния электродвигателя и другими физическими и технологическими параметрами при решении различных технических задач.
Цель изобретения - повышение точ- ности и быстродействия,
На чертеже изображена блок-схема предлагаемого регулятора.
Пропорционально-интегральный регулятор 1 содержит блок 2 вычитания, интегратор 3, имеющий вход 4 Установка, сумматор 5, выходные шины знака 6 и модуля 7 блока вычитания, первьш 8 и второй 9 элементы НЕРАВНОЗНАЧНОСТЬ, элемент 10 совпадения, выходные шины знака 11 и модуля 12 интегратора, входные шины знака 13 и модуля 14 первого входа пропор- ционально-интегр ального регулятора, выходные шины знака 15 и модуля 16 пропордионально-интегрального регулятора, объект 17 регулирования, входные шины знака 18 и модуля 19 второго входа пропорционально-интегрального регулятора, блок 20 управления, состоящий, например, из генератора 2 тактовых импульсов и распределителя импульсов 22, имеющего выходы 23-25
Интегратор 3 может быть реализован в виде любого известного цифрового параллельного сумматора-накопителя с цифровыми входами (шины 6 и 7) и цифровым выходом (шины 11 и 12) на интегральных схемах, например, серии К555, К531, К155.
Блок 2 может быть реализован в виде любого известного цифрового параллельного реверсивного сумматора с двумя цифровыми входами (шины 13, 14 и 18, 19) на интегральных схемах, например К155 ИМЗ.
Сумматор 5 может быть реализован Б виде Известного цифрового параллельного сумматора с двумя цифровыми входами (шины 6, 7 и 11,12) и цифровым выходом (шины 15 и 16) на интегральных схемах К155 ИМЗ.
Элементы 8 и 9 реализованы на микросхеме К155 ЛП5. Элемент 10 может
быть реализован на микросхеме К155 ЛИ1. Устройство работает следующим образом,
Предположим, что на выход регулятора 1 в момент дискретного времени t; подается входной сигнал V(t;), который по шинам 13 и 14 поступает на первый вход (уменьшаемого) блока 2, На второй вход вычитаемого блока 2 по шинам 18 и 19 поступает сигнал Y(t;;) обратной связи. Этого сигнал блока 2 вычитается из- входных сигналов задания, в результате чего на его выходе на шинах 6 и 7 образуется разностный сигнал рассогласования
uY(t.) V(t; )-Y(t;),
Этот сигнал по шинам 6 и 7 подается на вход цифрового параллельного сумматора-накопителя (интегратора) 3 и на вход цифрового параллельного сумматора 5.
Генератор 21 импульсов вырабатывает импульсы с частотой F, которые поступают на вход распределителя 22 импульсов. Последний циклически на своих выходах 23-25 вырабатывает последовательно по выходам тактовые импульсы стробирования. При этом первьй импульс с выхода 23 стробиру- ет цифровой параллельный сумматорнакопитель (интегратор 3), второй импульс с выхода 24 стробирует элемент 10, третий импульс с выхода 25 стробирует сумматор 5, формируя в момент строба на его выходе суммарный
сигнал управления S(t}), При подаче каждого стробирующего импульса п-раз- рядное число fiy(t;) на входе 6 и 7 ... цифрового параллельного сумматора- накопителя суммируется с его содержимым, В результате при непрерывном поступлении стробирующих импульсов в цифровом сумматоре-накопителе 3 образуется сумма числовьгх значений входного сигнала
Z:K AY(t.) + с, t;-0
где С - начальное число в блоке 3;
К - коэффициент,
в данном случае определяемый частотой стробирования, ртносительным сдвигом разрядов параллельных чисел, формируемых на параллельных шинах 7 модуля сигнала uY(t;) при подключении к параллельному входу сумматора- накопителя.
Если С О, то сумма будет иметь вид:
Z:K &Y(t.).
i-,-0
Эта сумма является дискретной реализацией интеграла- входного сигнала t
J KuY(t)J
t-.
При динамических изменениях, например, связанных с уменьшением нагрузпропорциональгде с. - время в непрерывном отсчете.
По шинам 11 и 12 с выхода цифрово-jg го параллельного сумматора-накопителя (блок 3) сигналы поступают на входы первого слагаемого цифрового сумматора 5, на входы второго слагаемого которого по шинам 6 и 7 подаются сигна- (5 водит к изменению знака и интегральной лы с выхода цифрового блока 2
ки или с торможением, ная составляющая n(t;) изменяет знак на обратный на более длительный период. При более глубоком торможении длительное изменение знака n(t,-) привычитания сигналов обратной связи. Сумматор 5 алгебраически (с учетом знака слагаемых) суммирует результат интегрирования с результатом вычитания и на шинах 15 и 16 его выхода образуется пропорционально-интегральный сигнал управления
t S(t) K.uYCt; ) + К, Ц KAY(t,).
Ч;-0
При этом пропорциональная составляющая сигнала управления
составляющей сигнала управления, U(t.) . В результате торможение приобретает интенсивный характер.
В один из моментов времени t регу20 лируемый параметр частоты вращения электродвигателя достигает заданной величины, что немедленно фиксирует сигнал пропорциональной составляющей, изменяя свой знак на знак, соответ25 ствующий знаку сигнала задания. В этот момент времени получается (естественным .образом) совершенно неправильная ситуация работы регулятора. Параметр в норме, пропорциональная
.n(t;) К, U Y(t.).
Интегральная составляющая сигнала управления
U(t;) Kj i: KAY(t;).
Коэффициенты К, К , К определяются и задаются конкретной техической реализацией устройства.
Сигнал управления S(t) по шинам 15 и 16 подается на вход объекта 17 управления.
При работе в статическом режиме, например по поддержанию скорости вращения электродвигателя, интегральная 5 тегрирования со знаком сигнала резуль- составляющая U(t.) имеет знак, соответствующий знаку сигнала задания. Например, при знаке сигнала задания + (сигнал О на шине 13) U(i:.) имеет + (сигнал О на шине 11), а при знаке сигнала задания - (сиг- 1 на шине 13) имеет - (сигна шине 11). При этом по аб50
нал
нал 1
солютному значению сигнал результата интегрирования имеет относительные изменения достаточно плавного характера.
Пропорциональная составляющая n(t , ) при перерегулировании изменяет
55
тата вычитания.
Сигналы с выхода шин 13 знаков сигнала задания и шин 11 знаков интегральной составляющей поступают на входы элемента 9, который на своем в ыходе образует логическую функцию 13-1IV 13-11, фиксируя несоответствие знака сигнала результата интегрирования со знаком сигнала задания.
Выходы элементов 8 и 9 включены на входы-элемента 10, третий вход которого включен на выход 24 распределителя 22 импульсов,вырабатывающего
320792;4
знак на противоположный знаку сигнала задания. Например, при знаке сигнала задания + (сигнал О на шине 13) n(t;) имеет - (сигнал 1 на шине 6), а при знаке сигнала задания - (сигнал 1 на шине 13) имеет + (сигнал О на шине 6).
При динамических изменениях, например, связанных с уменьшением нагрузпропорциональе.
-jg я - (5 водит к изменению знака и интегральной
ки или с торможением, ная составляющая n(t;) изменяет знак на обратный на более длительный период. При более глубоком торможении длительное изменение знака n(t,-) приjg(5 водит к изменению знака и интегральной
составляющей сигнала управления, U(t.) . В результате торможение приобретает интенсивный характер.
В один из моментов времени t регу0 лируемый параметр частоты вращения электродвигателя достигает заданной величины, что немедленно фиксирует сигнал пропорциональной составляющей, изменяя свой знак на знак, соответ5 ствующий знаку сигнала задания. В этот момент времени получается (естественным .образом) совершенно неправильная ситуация работы регулятора. Параметр в норме, пропорциональная
0 составляющая это-идентифицирует, а интегральная составляющая U(t;) в силу инерционности рырабатывает сигнал с обратным знаком управления, не соответствующим по направлению требуе5 мому воз действиюс
Для ликвидации несоответствия и улучшения динамических характеристик сигналы с выхода шин 6 знаков пропорциональной составляющей и шин 11
0 знаков интегральной составляющей поступают на входы элемента 8, который на своем вькоде образует логическую функцию V6 11, фиксируя несоответствие знака сигнала результата интегрирования со знаком сигнала резуль-
тата вычитания.
Сигналы с выхода шин 13 знаков сигнала задания и шин 11 знаков интегральной составляющей поступают на входы элемента 9, который на своем в ыходе образует логическую функцию 13-1IV 13-11, фиксируя несоответствие знака сигнала результата интегрирования со знаком сигнала задания.
Выходы элементов 8 и 9 включены на входы-элемента 10, третий вход которого включен на выход 24 распределителя 22 импульсов,вырабатывающего
на этом выходе второй импульс стро- бирования. В момент строба реализуется логическая функция
(13 Л V il -11) (6-П V 6-11),
в результате чего появление импульса на выходе элемента 10 фиксирует момент несоответствия знака сигнала результата интегрирования со знаком сиг-tO тора, выходные шины знака и модуля
нала задания и одновременно со знаком сигнала результата вычитания. Выход элемента 10 включен на вход 4 установки цифрового параллельного сумматоранакопителя. Поэтому в момент возник- J5 целью повышения точности и быстродейновения сигнала несоответствия, который вырабатывает элемент 10, этим сигналом цифровой интегратор 3 Устанавливается в нулевое состояние, т.е. заменяется сигнал результата интегрирования на другой исходньй сигнал (в данном случае нулевой), начиная с которого далее интегрируют результат вычитания. .
Формула изобретения
25 рого элементов НЕРАВНОЗНАЧНОСТЬ соединены с выходной шиной знака интегратора, выходы первого и второго эл ментов НЕРАВНОЗНАЧНОСТЬ связаны соответственно с первым и вторым вхоПропорционально-интегральньй регулятор, содержащий блок вычитания, интегратор и сумматор, причем шина зна- 30 дами элемента совпадения, выход кока и шина модуля первой группы вхо- торого подключен к входу Установка дов блока вычитания соединены с соответствующими шинами первой группы входов пропорционально-интегральноинтегратора, первый, второй и третий выходы распределителя импульсов связаны соответственно с тактовым
го регулятора, шина знака и шина мо- входом интегратора, третьим входом дуля второй группы входов блока вычи- элементов совпадения и тактовым тания подключены к соответствующим входом сумматора.
шинам второй группы входов пропорционально-интегрального регулятора, выходные шины знака и модуля блока вычитания подсоединены к соответствующим шинам интегратора и соответствующим шинам первой группы входов сумматора, у которого шины знака и модуля второй группы входов подключены к соответствующим выходным шинам инте грасумматора соединены с соответствующими выходными шинами пропорционально-интегрального регулятора от- личающийся тем, что, с
ствия, в него введены два элемента . НЕРАВНОЗНАЧНОСТЬ, элемент СОВПАДЕНИЯ, блок управления, первый вход первого элемента НЕРАВНОЗНАЧНОСТЬ подключен
к выходной шине знака блока вычитания, первый вход второго элемента НЕРАВНОЗНАЧНОСТЬ соединен с шиной знака первой группы входов блока вычитания, вторые входы первого и второго элементов НЕРАВНОЗНАЧНОСТЬ соединены с выходной шиной знака интегратора, выходы первого и второго элементов НЕРАВНОЗНАЧНОСТЬ связаны соответственно с первым и вторым входами элемента совпадения, выход которого подключен к входу Установка
дами элемента совпадения, выход которого подключен к входу Установка
интегратора, первый, второй и третий выходы распределителя импульсов связаны соответственно с тактовым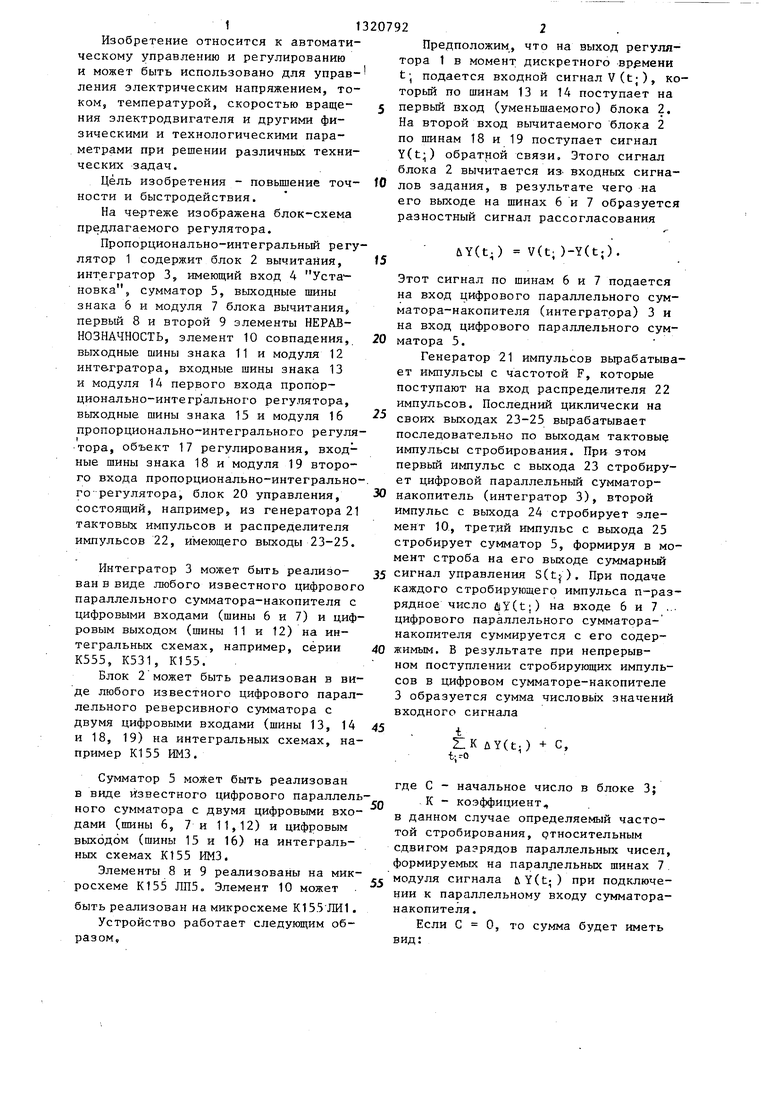
| название | год | авторы | номер документа |
|---|---|---|---|
| Пропорционально-интегральный регулятор | 1988 |
|
SU1566318A1 |
| Интегральный регулятор | 1982 |
|
SU1297007A1 |
| Устройство для моделирования импульсного частотно-фазового дискриминатора | 1986 |
|
SU1354218A1 |
| ЦИФРОВОЙ РЕГУЛЯТОР | 1971 |
|
SU318017A1 |
| Пневматический регулятор | 1978 |
|
SU840796A1 |
| ПРОПОРЦИОНАЛЬНО-ИНТЕГРАЛЬНО-ДИФФЕРЕНЦИАЛЬНЫЙ РЕГУЛЯТОР | 2002 |
|
RU2234116C1 |
| Пневматический самонастраивающийся регулятор | 1976 |
|
SU590693A1 |
| СПОСОБ УПРАВЛЕНИЯ ГРУППОЙ ИМПУЛЬСНЫХ ПРЕОБРАЗОВАТЕЛЕЙ | 1983 |
|
SU1284443A1 |
| Самонастраивающаяся система комбинированного регулирования | 1986 |
|
SU1339494A1 |
| Аналого-цифровой интегратор | 1977 |
|
SU682908A2 |

Пропорционально-интегральный регулятор относится к технике автоматического управления и регулирования. Целью изобретения является повышение точности и быстродействия. Поставленная цель достигается тем, что в регулятор введена цепь корр екции, состоящая из двух элементов НЕРАВНОЗНАЧНОСТЬ и элемента совпадения, позволяющая осуществлять сброс интегральной составляющей на основе анализа знаков сигналов пропорциональной и интегральной составляющей. 1 ил. (/)
Редактор Е. Копча
Составитель С. Никитой
Техред М.Моргентал Корректор М. Шароши
Заказ 2658/51Тираж 863Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская иаб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
| Бесекерский В.А., Попов Е„П, Теория систем автоматического .управления | |||
| М.: Машиностроение, 1972, с | |||
| Говорящий кинематограф | 1920 |
|
SU111A1 |
| Система управления | 1977 |
|
SU705417A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Система управления | 1982 |
|
SU1092461A2 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
