траекториям, лажашды о.циои , ILC: кости. При вк.пычепии ivpniuir;; г: ; i i- привода редукторы 4 поворачивн о г-н на оси 5 относительно основаккя i, при этом осуществляется поворот зуб- ,чатых реек 6 и 7. Ролики lA, шарпап- но связанные с рейками 6, пгремецаыт- ся по направляющим 15 основания 1
Изобретение относится к строительному машиностроению, в частное in. к манипуляторам для окраски шг п реч- них и HapyjKHbDc поверхностей здгп-и:,й,
Целью изобретения является НСЛЗЕЛ- шение производительности и н.ада/:-;нос.-- И1 за счет увеличения ко о-гоества полнительных механизмов, работа1г.1дих от одного привода при обеспечени.и перемещений исполнительных органов с постоянной скоростью и по траекю- рйям, лежащим в одной плоскости.
На фиг, 1 показана кинематическая схема манипулятора; на фиг. А на фиг. 1 , на фиг, на фиг, 1; на фиг„ 4 манипулятора на нередвизк.ног- т анспсуг ном средстве.
На основании 1 размещены два зуб-- чато-реечных исполнительных механизма 2 и привод 3 I-K перемегдения. Как- дьй механизм 2 состоит из зубчатого редуктора 4, корпус которого шарнир- но посредством осей Ь связан с основанием 1, и двух зубчатых реек 6 и, кинематически связанных между собой зубчатыми колесами 8-11 редуктора 4. Рейка 6 размещена в направляюпцгх корпуса редуктора 4, а рейка 7 -- размещена в рейке 6. Рейки 6 и 7 образую телескопическую пару звеньев.
На корпусе редуктора закреплены рычаги 12, с которьнда шарнирно связаны кривошипы 13 привода 3„
На рейках 6 имеются шарнирно связанные с ними ролики 14; размещенные в направляющих 15 корпуса редуктора 4, а на рейках 7 закреплены исполнительные органы 16.
Манипулятор смонтирован на передвижном транспортном средстве 17 посредством кронштейна 18. Положение
и смещают в осевом нанравлении рей- jui о, Кинемат ически связанные с ними посредством редукторов 4 рейки /5 на которых закреплены исполнительные органы 16; перемешаются в том же направлении, что и рейки 6, но с другой скоростью и другой величиной хода. 4 ил.
манипулятора в пространстве регулируется приводагш 19 и 20.
Предлагаемый манипулятор работает следующим образом.
Вначале приводами 19 и 20 и транспортным средством 17 исполнительные органы 16 манипулятора выставляются относительно окрашиваемой поверхности. Далее включается привод 3,
кривошипы 13 которого поворачивают относительно основания 1 редукторы 4 с рейками 6 и 7, При этом ролики 14 перемещаются по направляющим 15 и происходит осевое перемещение реек
6, а также реек 7 с исполнительньми органами 1б„
Рейки 6 и 7 перемещаются в одном направлении, но с разньц ш скоростя- гш и различной величиной хода.
о р м у л а изобретения
Манипуллтор, содержашдй основание с направляющш и, размещенный на основании первый зубчато-реечный исполнительный механизм, на рейке которого, связанной с указанными направляющими, закреплен исполнительный орган, и привод с выходным звеном, отличающийся тем, что. с целью повышения производительности и надежности за счет увеличения количества исполнительных
механизмов, работающих от одного привода при обеспечении перемещений исполнительных органов с постоянной скоростью и по траекториям, лежащим в одной плоскости, на основании размещен второй зубчато-реечный исполнительный механизм, причем каждый из исполнительных механизмов содер- ж;ит зубчатьй редуктор, корпус которого шарнирно связан с основанием и снабжен закрепленным на нем рычагом и направляющими, в которых размещена соответствующая зубчатая рейка, причем эта рейка снабжена шарнирно связанными с ней роликами, размещенными в направляющих основания, и в ней вдоль ее оси выполнено отверстие, в котором с возможностью продольного перемещения размещена дополнительная зубчатая рейка, кинематически связан
ная с первой основной рейкой исполнительного механизма посредством указанного редуктора, при этом исполнительные органы закреплены на соответствующих дополнительных зубчатых рейках, а вькодное звено привода выполнено в виде поворотных и противоположно расположенных кривошипов, каждый из KoTopbtx шарнирно связан с рычагом корпуса соответствутощего редуктора.
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор | 1985 |
|
SU1284820A1 |
| Манипулятор модульного типа | 1990 |
|
SU1775289A1 |
| Устройство для подачи листовых заготовок в рабочую зону пресса | 1991 |
|
SU1777569A3 |
| Манипулятор | 1989 |
|
SU1796335A1 |
| Многопозиционный пресс для листовой штамповки | 1988 |
|
SU1562049A1 |
| Захватное устройство | 1986 |
|
SU1421530A1 |
| Устройство для шаговой подачи заготовок в зону обработки | 1984 |
|
SU1346306A1 |
| Горная машина | 1986 |
|
SU1448041A1 |
| Рука манипулятора | 1981 |
|
SU992180A1 |
| СХВАТ ПРОМЫШЛЕННОГО РОБОТА | 1998 |
|
RU2149098C1 |


Изобретение относится к области строительного машиностроения, в частности к манипуляторам для окраски внутренних и наружных поверхностей зданий. Целью изобретения является повышение производительности и надежности за счет увеличения количества исполнительных механизмов, работающих от одного привода при обеспечении перемещений исполнительных органов с постоянной скоростью и по (Л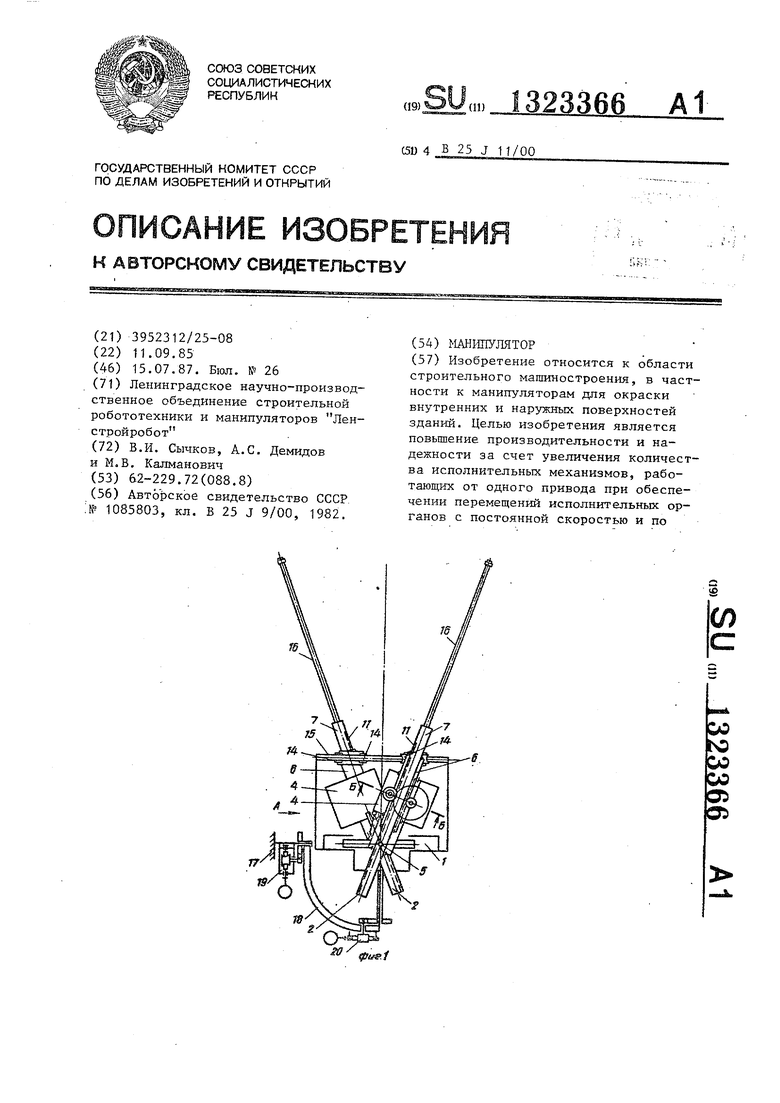
fS J
/4/5
70
Редактор Л.Повхан
Составителгэ Ю.Бильчинскт
Техред А.КравчукКорректор И.Мускз
Заказ 2914/19
Тираж 953Подписное
ВНШШИ Государственного комитета СССР по делам изобретений и открытий 113035., Москва, Ж-35, Раушская наЕ5. , д. 4/5
Производственно-полиграфическое щ едприятие, г. Ужгородр ул. Проектная, 4
CpUS- -i
| Промышленный робот | 1982 |
|
SU1085803A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
