повышение производительности за счет обеспечения независимости движения захватных губок и исключения потерь времени на переналадку на другой типоразмер заготовок, для чего в корпусе 1 смонтирован дифференциальный привод, выполненньй в виде коаксиальных силовых цилиндров (СЦ), состоящих из поршня 8, являющегося корпусом для внутреннего СЦ с поршнем 10, При подаче рабочей среды в штоковые полости СЦ, соединенные отверстием 12, Перемещаются выходные элементы (штоки) 9, 11, передавая движение через
Изобретение относится к машиностроению, а именно к промышленным роботам, и предназначено для автоматизации производственных процессов обработки преимущественно, корпусных заготовок.
Цель изобретения - расширение функциональных возможностей и повьш1ение производительности за счет обеспечения независимости движения захватных гурок и исключения потерь времени на переналадку.
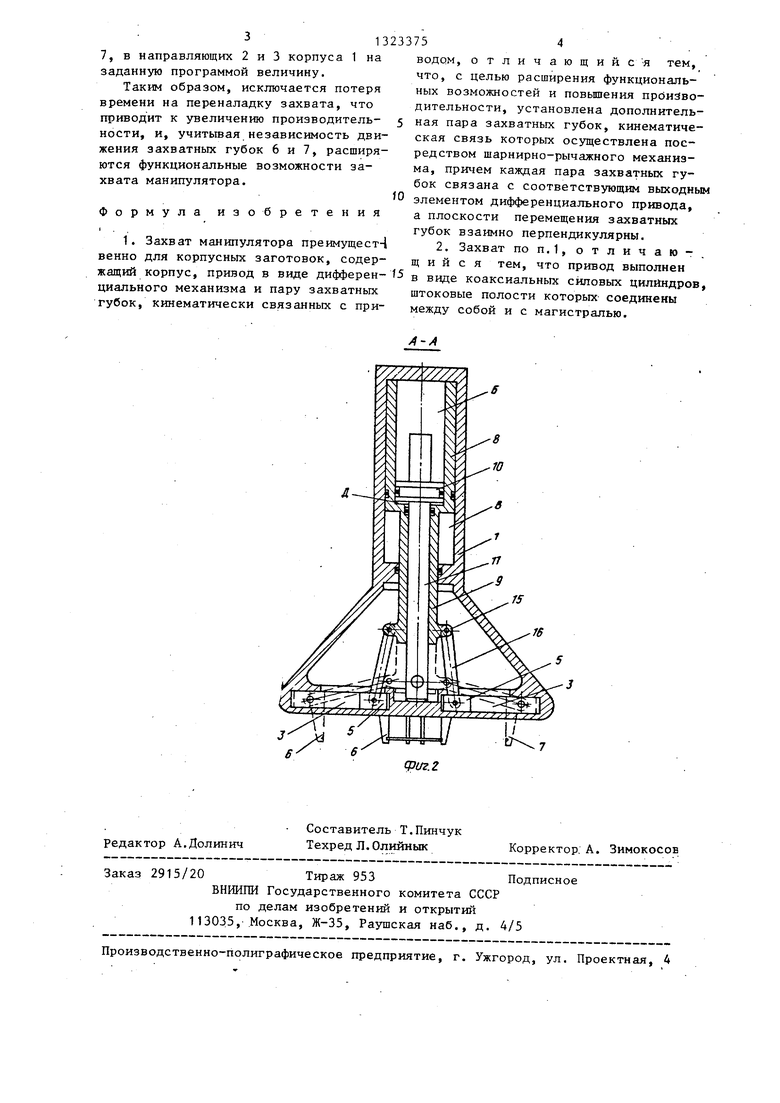
На фиг.1 изображен захват, разрезj на фиг.2 - разрез А-А на фиг.1,
Захват содержит корпус 1, в котором перпендикулярно друг другу выполнены направляющие 2 и 3. В них установлены камни 4 и 5, несущие захватные губки 6 и 7.
В корпусе 1 смонтирован дифференциальный привод, выполненньй в виде коаксиальных силовых цилиндров, состоящий из поршня 8 с выходным элементом (штоком) 9, являющимся корпусом для внутреннего силового цилиндра с поршнем 10 и выходньм элементом (штоком )11. Штоковые полости соединены между собой отверстием 12. Рабочая среда (например, сжатый воздух) подается из магистр али в полости силового цилиндра через штуцеры 13 и 14. На штоке 9 расположены ушки 15, которые соединены с камнями 5 посредством рычагов 16. На штоке 11 расположены ушки 1-7, которые соединены с камнями 4 по средством рычагов 18.
ушки 17, рычаги 18 на камни 4, несущие захватные губки 6 и 7. При изменении типоразмера заготовки автоматически подачей рабочей среды изменяется величина перемещения выходных элементов (штоков) 9, 11 дифференциального провода, а следовательно, захватных рычагов 18, независимо перемещающихся друг относительно друга. Это исключает потери времени на переналадку и расширяет функциональные возможности захвата манипулятора. 1 3.п. ф-лы, 2 ил.
Захват работает следующим образом.
Для развода захватных губок 6 и 7 рабочая среда подается через штуцер 13 в бесштоковую полость силового ци- линдра. При этом оба поршня 8 и 10, а следовательно, и выходные элементы (штоки) 9 и 11 перемещаются в крайнее нижнее положение.
Захват подводится к заготовке. Рабочая среда подается через штуцер 14 в бесштоковую полость наружного силового цилиндра и одновременно .попадает в штоковую полость внутреннего силового цилиндра через отверстие 12. При этом, в бесштоковой полости давление снимается.
Поршни 8 и 10 перемещаются вверх. Движение передается посредством выходных элементов (штоки) 9 и 11, ушек 15 и 17, рычагов 16 и 18 на кам- HJ. 4 и 5, несущие захватные губки 6 и 7, которые перемещаются независимо
Друг от друга и симметрично относительно оси захвата.
После зажатия заготовки манипулятор перемещает ее в заданное место.- При изменении типоразмера детали
автоматически подачей рабочей среды увеличивается или уменьшается смещение поршней 8 и 10 силового цилиндра, что изменяет перемещения выходных элементов (штоков) 9 и 11, а следовательно, рычагов 16 и 18, которые обеспечивают перемещение камней 4 и 5, соединенных с зажимными губками 6 и
7, в направляющих 2 и 3 корпуса 1 на заданную программой величину.
Таким образом, исключается потеря времени на переналадку захвата, что приводит к увеличению производительности, и, учитьшая независимость движения захватных губок 6 и 7, расширяются функциональные возможности захвата манипулятора.
Формула изобретения
1. Захват манипулятора преимущест-i венно для корпусных заготовок, содержащий корпус, привод в виде дифферен- t5 циального механизма и пару захватных губок, кинематически связанных с при
водом, о тличающийс -я тем, что, с целью расширения функциональных возможностей и повышения производительности, установлена дополнительная пара захватных губок, кинематическая связь которых осуществлена посредством шарнирно-рычажного механизма, причем каждая пара захватных губок связана с соответствующим выходным элементом дифференциального привода, а плоскости перемещения захватных губок взаимно перпендикулярны.
2. Захват поп.1, отличаю-, щ и и с я тем, что привод выполнен в виде коаксиальных силовых цилиндров, штоковые полости которых соединены между собой и с магистралью.
-/t
./:й
iT/6
| название | год | авторы | номер документа |
|---|---|---|---|
| Захватное устройство | 1987 |
|
SU1414636A1 |
| Схват | 1982 |
|
SU1060469A1 |
| Захватная головка манипулятора | 1986 |
|
SU1342727A1 |
| Захват манипулятора | 1980 |
|
SU891434A1 |
| Захватное устройство | 1986 |
|
SU1355483A1 |
| Захват манипулятора промышленного робота | 1990 |
|
SU1745542A1 |
| АДАПТИВНЫЙ СХВАТ МАНИПУЛЯТОРА | 1991 |
|
RU2021099C1 |
| Захватное устройство | 1987 |
|
SU1414635A1 |
| ЗАХВАТ МАНИПУЛЯТОРА | 2001 |
|
RU2207246C1 |
| Захватное устройство | 1984 |
|
SU1197835A1 |
Изобретение относится к машино строению, а именно к промышленным роботам, и предназначено для автоматизации производственных процессов обработки преимущественно корпусных заготовок. Пель изобретения - расширение функциональных возможностей и (Л fpua.t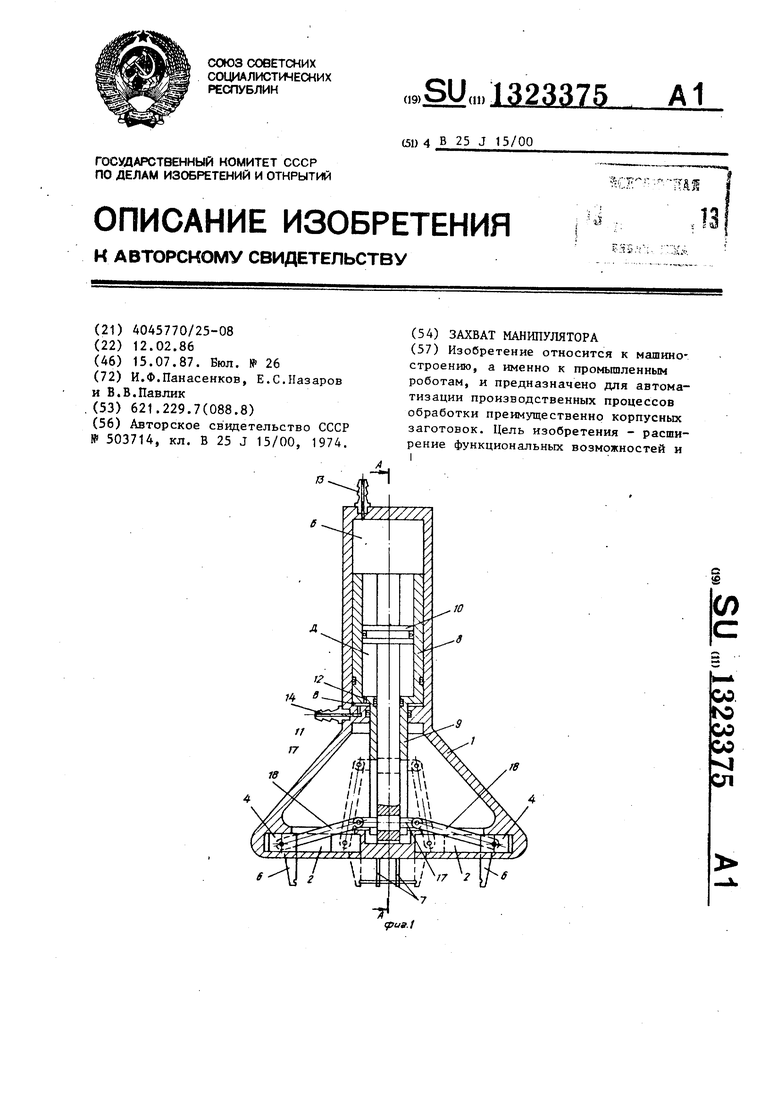
редактор А.Долинич
Составитель Т.Пинчук Техред Л.Олийнык
Заказ 2915/20Тираж 953Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
Корректор, А. Зимокосов
| Захват манипулятора | 1974 |
|
SU503714A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
