(Л
11
Изобретение относится к машиностроению, а именно к промьииленным роботаМя манипуляторам и автооператорам s предназначенным для механизации и автоматизации основных и вспомогательных операций.
Цель изобретения - повышение надёжности работы.
На чертеже приведено захватное устройство.
Устройство содержит корпус 1 сило вфго 1дилиндра прямоугольной формы В;сечении, в котором расположен пор- шфнь 2 также прямоугольной формы в сфчении, перпендикулярном оси силово гф Ц1илиндра, Шток 3 силового цилинд- pi содержит двухстороннюю зубчатую АЗ взаимодействующую посредст- вфм зубчатых секторов 5 с зажимными губками 6. В корпусе 1 силового цилиндра установлен в направляющих 7 опорный вал 8, ось которого перпендикулярна оси силового цилиндра. В продольном пазу вала 8 установлена уйлотнительная пластина 9, подпружиненная относительно вала 8 пружиной Ю сжатия. Вал 8 фиксируется относительно корпуса 1 силового цилиндра винтом 11 о
Захватное устройство работает следующим образом.
Для предварительной регулировки уЬилия сжатия детали 12 поршень 2 сЬ штоком 3 сдвигают вправо до касания зажимных губок 6 с деталью 12. Затем ослабляют винт 11 и .разворачивают вал 8 таким образом, чтобы рабочая площадь сечения поршня силового цилиндра в плоскоети5 перпендикулярной оси ЦИЛИНДРЕ} характеризующаяся площадью сечения поршня 2 силового цилиндра проходящей по линии контакта поршня с уплотнительной п.пастиной 9, соответствовала рассчет ному усилию сжатия детали 12„ В дан35 2
ном положении опорньй вал 8 фиксируется относительно корпуса 1 винтом 11. Для зажатия детали 12 рабочая среда под давлением подается в штоковую полость силового цилиндра, шток 3 с поршнем 2 двигается вправо, при этом уплотнительная пластина 9, скользя по поверхности поршня 2, перемещается вдоль паза опорного вала 8,
при этом усилие на штоке 3 увеличива ется, а скорость перемещения падает. Шток 3 через двухстороннюю зубчатую рейку 4, зубчатые секторы 5 передает вращение зажимным губкам 6. Деталь 12 захватывается зажимными губками 6 с заранее заданным усилием.
Для освобождения детали 12 от зажима рабочая среда под давлением по
ступает в бесштоковую полость силового цилиндра, зажимные губки 6 расходятся и деталь 12 освобождается от зажима.
Формула изобретения
Захватное устройство, содержащее корпус, на котором установлены зажимные губки, кинематически связанные с приводом линейного перемещения выполненным в виде силового цилиндра прямоугольной формы в сечении, перпендикулярном оси силового цилиндра, причем поршень выполнен переменного сечения в плоскости, параллельной
одной из стенок корпуса, а в других его стенках установлены подпружиненные уплотнительные пластины, предназначенные для взаимодействия с , поршнем, отличающееся тем, что, с целью повьшюния надежности работы, по меньшей мере одна под пружиненная уплотнительная пластина размещена в продольном пазу дополнительно введенного опорного вала,
установленного в корпусе с возможностью поворота и фиксации.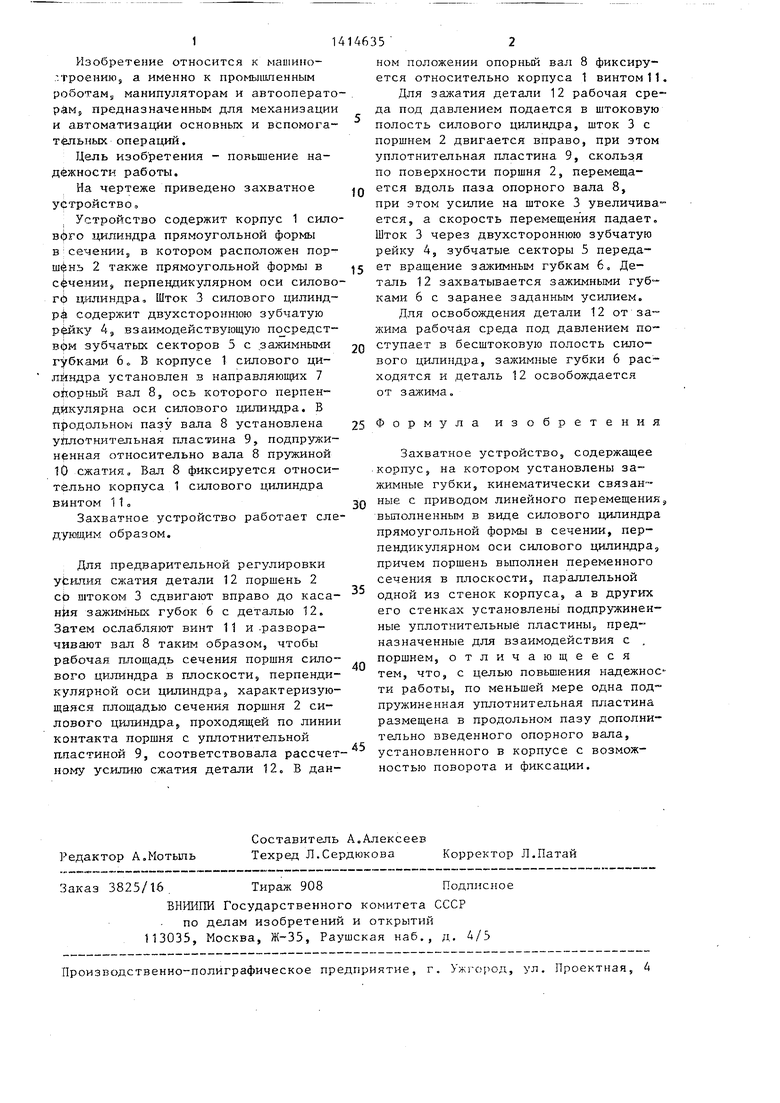
| название | год | авторы | номер документа |
|---|---|---|---|
| Захватное устройство | 1986 |
|
SU1342725A1 |
| Захватное устройство | 1987 |
|
SU1414636A1 |
| Автооператор | 1982 |
|
SU1057237A1 |
| Схват | 1982 |
|
SU1060469A1 |
| Схват промышленного робота | 1980 |
|
SU931467A1 |
| Схват | 1987 |
|
SU1440707A2 |
| Захватное устройство | 1980 |
|
SU997364A1 |
| Захват | 1980 |
|
SU905061A1 |
| УСТРОЙСТВО ДЛЯ РЕЗКИ ТОНКОСТЕННЫХ ТРУБ | 1991 |
|
RU2010687C1 |
| Захватное устройство | 1985 |
|
SU1291393A1 |
Изобретение относится к области машиностроения, а именно к промышленным роботам, манипуляторам и автооператорам, предназначенным для .механизации и автоматизации основных и вспомогательных операций. Целью изобретения является повышение надежности работы. Поршень 2 перемещают до касания зажимных губок 6 детали 12. Затем разворачивают вал 8 таким образом, чтобы рабочая площадь сечения поршня соответствовала расчетному усилию сжатия детали 12. Вал фиксируется винтом 11. среда подается в штоковую полость. Шток 3 через двухстороннюю зубчатую . рейку 4, зубчатые секторы 5 передает вращение зажимным губкам 6, которые зажимают деталь 12 с зажимным ускпием. 1 ил.