центре рамы 2 вертикальное сквозное отверстие 9 со скосом 10 на его смежной с выступом 6 упора 5 стороне, кольца 11, свободно надетого на рычаги 3 в месте их пересечения и жестко закрепленных на раме 2 вертикальных направляющих стоек 12, постоянно обеспечивающтих вертикальное положение кольца 11. На обращенных вверх
1
Изобретение относится к подъемно- транспортному оборудованию, а именно к автоматическим крановым грузозахватным устройствам для штучных грузов. .
Цель изобретения - упрощение конструкции .
На фиг.1 показан автоматический клещевой -захват при опускании на груз; на фиг.2 - то же, при зажиме груза рычагами; на фиг.З - то же, пр подъеме захвата с грузом; на фиг.4- то же, при освобождении груза; на фиг.З - то же, при подъеме захвата без груза. .
Автоматический клещевой захват содержит навешиваемые на крюк грузоподъемного средства тяги 1, раму 2, на которой шарнирно закреплены захватные рычаги 3, верхними концами шарнирно соединенные с тягами .1, и механизм 4 фиксации захватных рычаго в раскрытом положении,, Последний расположен симметрично относительно оси подвеса крюка и состоит из упора 5, вьтолненного с выступом 6 на одной из его боковых сторон и со смещенным к той же стороне центром тяжести и снабженного планкой 7, средняя часть которой шарниром 8 прикреплена к другой стороне упора 5, а один конец легче другого и расположен над упором 5 таким образом, что может поворачиваться только в направлении к указанной стороне (по часовой стрел- ке), причем нижняя часть упора 5 входит в вьтолненное в центре рамы 2 вертикальное сквозное отверстие 9 со скосом 10 на его смежной с выступом 6
упора 5 стороне кольц з. 11, свободно над.етого на рычаги 3 в месте их переповерхностях рычагов 3 в зоне пересечения последних вьшолнены углубления, симметричные относительно оси подвеса крюка. Упор 5 может перемещаться по вертикали в отверстии 9 вниз под воздействием собственной массы на расстояние, ограниченное выступом 6, а вверх - под действием груза 14, 5 ил.
сечения и жестко закрепленных на раме 2 вертикальных направляющих стоек 12, постоянно oбecпeчивaюшJix вертикальное положение кольца 11. На обращенных вверх поверхностях рычагов 3 в зоне пересечения последних .выполнены углубления 13, симметричны относительно оси подвеса крюка. Упор 5 может перемещаться по вертикгши в отверстии 9 вниз под действием собственной массы на расстояние, ограниченное выступом 6, а вверх - под действием груза 14.
Захват работает следующим образом
При опускании захвата на груз 14 (фиг.1) верхняя часть кольца 11 находится в углублениях 13, фиксируя рычаги 3 в раскрытом положении. Упор 5 расположен вертикально, его нижняя часть выдвинута за пределы рамы 2, а выступ 6 упирается в скос 10.
После сопротивления с грузом 14 упор 5 поднимается (фиг.2) сначала вертикально, поскольку поворачиватьс (падать) в сторону скоса 10 ему не позволяет планка 7, верхний конец которой упирается в кольцо 11, удерживаемое в вертикальном положении направляющими стойками 12. Поднимаясь, упор 5 ударяет снизу на кольцо 11, в результате чего последнее выходит из углублений 13. Освобожденные рычаги 3 под действием собственного веса опускаются, увеличивая расстояние между- крюком и рамой 2, и поворачиваются, одновременно поднимается точка пересечения рычагов 3 и свободно надетое на них кольцо 11, а нижние части рычагов 3 сближаются. Это происходит до тех пор, пока рама 2 не ляжет на груз 14.
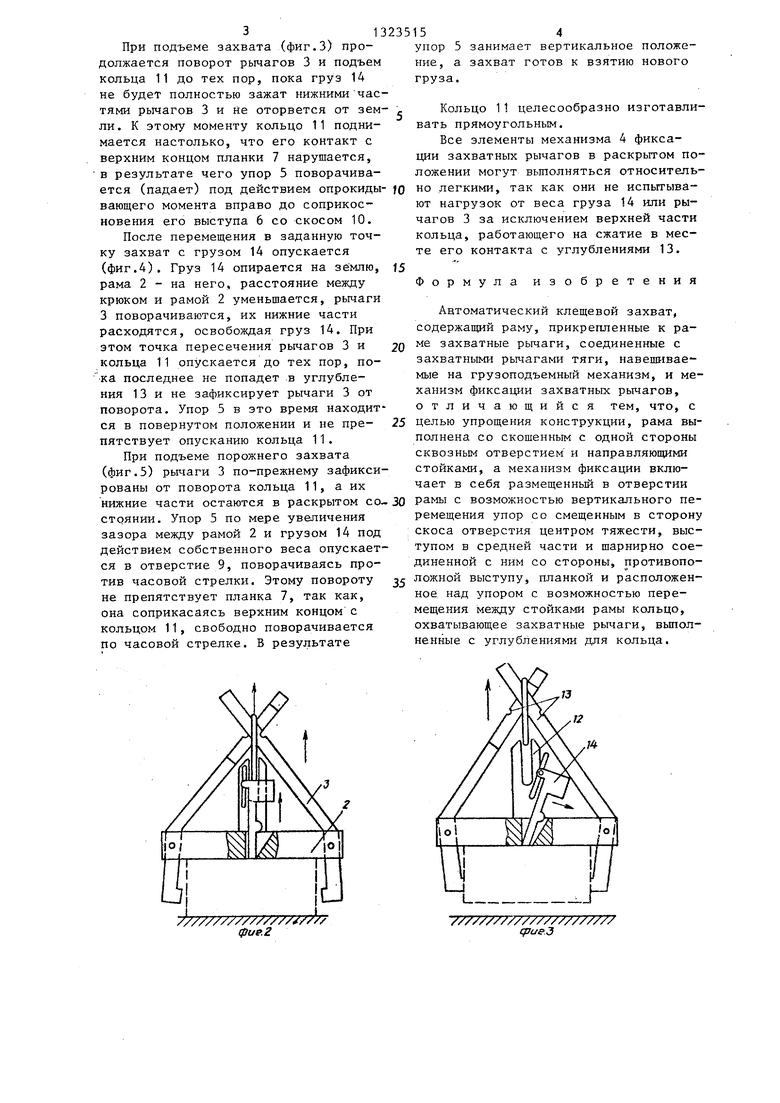
при подъеме захвата (фиг.З) продолжается поворот рычагов 3 и подъем кольца 11 до тех пор, пока груз 14 не будет полностью зажат нижними частями рычагов 3 и не оторвется от земли. К этому моменту кольцо 11 поднимается настолько, что его контакт с верхним концом планки 7 нарушается, в результате чего упор 5 поворачивается (падает) под действием опрокиды- JQ но легкими, так как они не испытывавающего момента вправо до соприкосновения его выступа 6 со скосом 10.
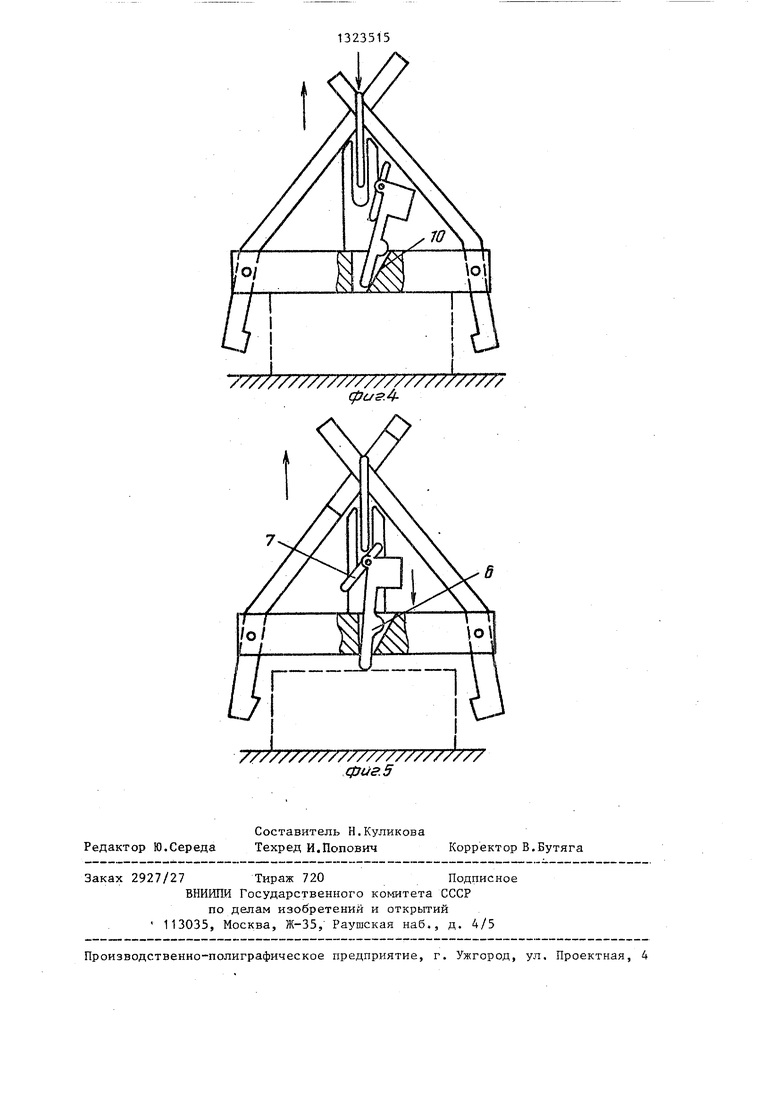
После перемещения в заданную точку захват с грузом 14 опускается (фиг.4). Груз 14 опирается на землю, рама 2 - на него, расстояние между крюком и рамой 2 уменьшается, рычаги 3 поворачиваются, их нижние части расходятся, освобождая груз 14. При этом точка пересечения рычагов 3 и кольца 11 опускается до тех пор, по- ка последнее не попадет в углубления 13 и не зафиксирует рычаги 3 от поворота. Упор 5 в это время находится в повернутом положении и не препятствует опусканию кольца 11.
При подъеме порожнего захвата (фиг.5) рычаги 3 по-прежнему зафиксированы от поворота кольца 11, а их нижние части остаются в раскрытом со стоянии. Упор 5 по мере увеличения зазора между рамой 2 и грузом 14 под действием собственного веса опускается в отверстие 9, поворачиваясь против часовой стрелки. Этому повороту не препятствует планка 7, так как, она соприкасаясь верхним концом с кольцом 11, свободно поворачивается по часовой стрелке. В результате
5 занимает вертикальное положение, а захват готов к взятию нового груза.
Кольцо 11 целесообразно изготавливать прямоугольным.
Все злементы механизма 4 фиксации захватных рычагов в раскрытом положении могут вьтолняться относитель15
0
ют нагрузок от веса груза 14 или рычагов 3 за исключением верхней части кольца, работающего на сжатие в месте его контакта с углублениями 13.
Формула изобретения
Автоматический клещевой захват, содержащий раму, прикрепленные к раме захватные рычаги, соединенные с захватными рычагами тяги, навешиваемые на грузоподъемный механизм, и механизм фиксации захватных рычагов, отличающийся тем, что, с целью упрощения конструкции, рама выполнена со скошенным с одной стороны сквозным отверстием и направляющими стойками, а механизм фиксации включает в себя размещенньш в отверстии рамы с возможностью вертикального перемещения упор со смещенным в сторону скоса отверстия центром тяжести, выступом в средней части и шарнирно соединенной с ним со стороны, противопо- ложной выступу, планкой и расположенное над упором с возможностью перемещения между стойками рамы кольцо, охватывающее захватные рычаги, вьшол- ненные с углублениями для кольца.
0
5
;3
t2
74
////////7//////yf//// фие.2
/////777/7/7777//////// сри&З
/////////7////////////////// фа.4S
///////7/////////////У7/7 фиг.д
Редактор Ю.Середа
Составитель Н.Куликова
Техред И.Попович Корректор В.Бутяга
Заках 2927/27 Тираж 720Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4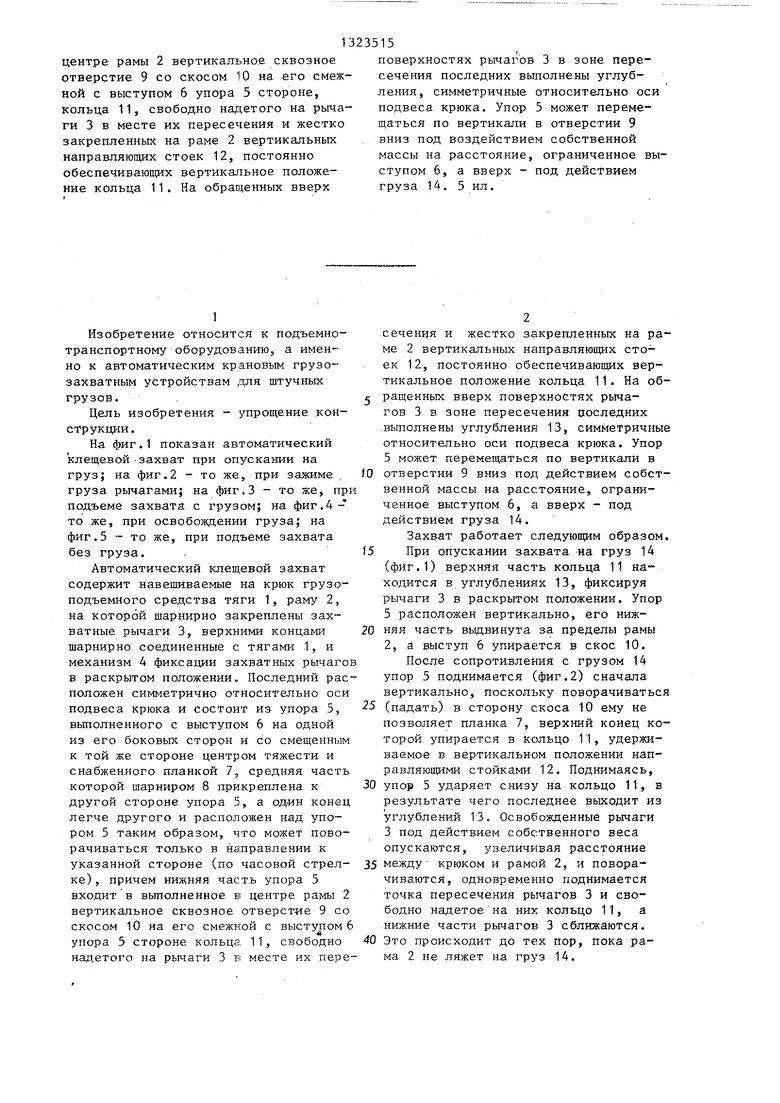
| название | год | авторы | номер документа |
|---|---|---|---|
| АВТОМАТИЧЕСКИЙ ЗАХВАТ РОДОВИКОВА | 2009 |
|
RU2394747C1 |
| Клещевой захват | 1982 |
|
SU1054272A1 |
| Автоматический клещевой захват | 1980 |
|
SU925838A1 |
| Клещевой захват | 1982 |
|
SU1008137A1 |
| Механизм фиксации захватного устройства | 1983 |
|
SU1105439A1 |
| Захватное устройство для грузов с фигурной головкой | 1977 |
|
SU727553A1 |
| Клещевой захват | 1980 |
|
SU910525A1 |
| Автоматический захват | 1981 |
|
SU977358A1 |
| Автоматический захват | 1981 |
|
SU1020350A1 |
| Захватное устройство | 1982 |
|
SU1055721A1 |
Изобретение относится к области подъемно-транспортного оборудования, а именно к автоматическим крановым грузозахватным устройствам для штучных грузов. Цель изобретения - упрощение конструкции. Автоматический клещевой захват содержит навешиваемые на крюк грузоподъемного средства тяги 1, раму 2, на которой шарнирно закреплены захватные рычаги 3, верхними концами шарнирно соединенные с тягами 1, и механизм 4 фиксации захватных рычагов в раскрытом положении. Механизм 4 фиксации захватных рычагов в раскрытом положении состоит из упора 5, выполненного с выступом 6 на одной из его боковых сторон, и со смещенным к той же стороне центром тяжести и снабженного планкой 7,средняя часть которой шарниром 8 прикреплена к другой стороне упора 5, а один конец легче другого и расположен над упором 5, причем нижняя часть упора 5 входит в выполненное в i (Л ТТТТТТТУ///// // /////// (puff.1 Г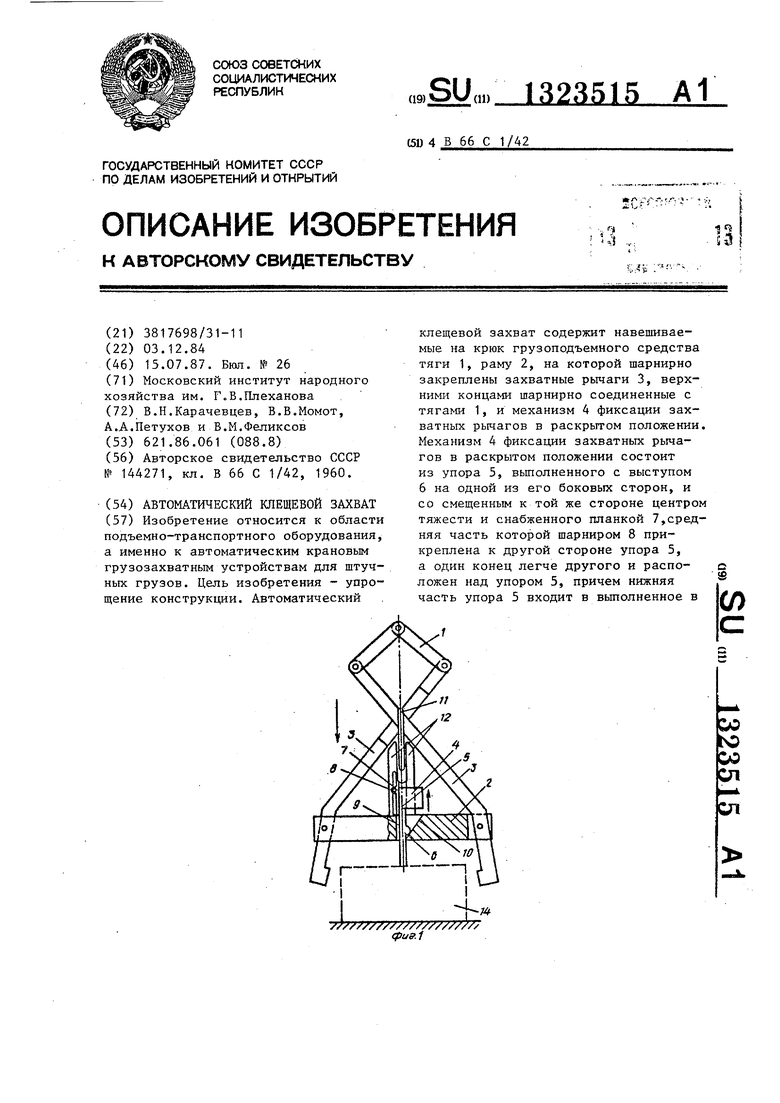
| Клещевой захват | 1960 |
|
SU144271A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
