Изобретение относится к обработке металлов давлением, в частности к устройствам для гибки арматуры из проволоки и прутков.
Цель изобретения - расширение номенклатуры изделий и увеличение производительности за счет сокран;ения межоперационного времени.
На фиг. 1 изображена гибочная машина в исходно. положении; на фиг. 2 - с.хема положения деталей машины в .момент завершения гиба на угол 90°; на фиг. 3 - то же, .момент, когда изгибаемый .материал приподнят над гибочны.ми органами и воз- враш,ен в положение над исходным; на фиг. 4 - то же, в момент резки.
Гибочная .ма1нина состоит из станин :, 1, в которой на валу 2 установлен гюворотн з Й диск 3 с гибочными элементами 4 и 5. Перед поворотным диском 3 ta поворотной планке 6 в вертикально.м положении установлены аллигаторные ножницы 7, челюсть 8 которых жестко закреплена на ке 6, а 9 онущена ниже планки 6 на уровень жестко закрепленных под планкой 6 у 10рОВ 10 10ЖНИ 1. И уПОрОВ 11 ВОЗврата в исходное положение. При взаимодействии с ограничителями 12 челюсти 8 и 9 ножниц 7 выполняют функции г ротиво- уноров. На валу 2 расположена опора 13 с возможностью вертикального подъема до верха ибочных элементов 4 и 5. Клин 14 установлен между онорой 13 и литой 15, закрепленной на станине 1 машины. Клин 14 снабжен направляющими щечками 16 и 17. Пере.меш.ение поворотного диска 3 на необходимый угол осупд.ествляется путем взаи.модействия рейки 18 с приводной 1нес- терней 19, закренленной на валу 2. Воз- вратно-ностунательное движение рейки 18 осуществляется, например, со.ченоидом 20, а клина - соленоидом 21, включение которых выполняется ЧПУ или другой аналогичной аг 1аратурой автоматики 22. Подача изгибаемого материала 23 осуществляется нодающи.м устройством 24.
Гибочная работает следующим образом.
Подающее устройство 24 перемеш.ает изгибаемый материал 23 между г ротивоуно- рами (челюстями 8 и 9 ножниц) и гибочными элементами 4 и 5. Для изготовления требуемого лоского элемента согласно со- ответству О цей программе ЧПУ или другая аналогичная аппаратура автоматики 22 включает в требуемой последовательности органы привода (соленоиды 20, 21), которые ридают необходимые возвратно- поступательные движения рейке 18 и клину 14. Операции гибки выполняются путем вращения поворотного диска 3, на которо.м установлены гибочные элементы 4 и 5, редством воздействия рейки 18 на приводную п естерню 19. Затем, перемещаясь
1аКЛОННОЙ плоскости ЛИТЫ 15, 14
воздействует на 13, которая нодни- .мает из ибаем з1Й .% атериал 23 над гибочными э; емента и 4 и 5. При дальнеЙ1пе.м движении 14 горизонтальной плоскости 15 опора 13 удерживается в верхнем г оложении (ia уровне верха гибочных элементов), а на рав; яющие щечки 16 и 17 клина 14, воздействуя на И,
Q Г рИВОДЯТ ОВОрОТНу О 6 в ИСХОД1 Ое
родольное оложе 1ие. Одновременно с эти.м поворотный диск 3 совместно с подъемом опоры 13 поворачиЕшетея в исходное юложение, а челюсть 8 или 9 возвращает изгибаемый материал 23 в оложение над
5 исходным. При обратном движе 1ии клина 14 13 0 1ускается п исходное г оложение, а из1 ибаемый материал 23 расг олагается между гибочными элементами 4 и 5. С учетом непрерыв(ой . 1ачи изгибаемого .маQ териала 23 через о ределенный отрезок вре- .мени (из ибаемь Й материал доела на ределенную длину) вь 1олняется следующий
гиб. Отрезка -ОТОВОГО ИЗОГ1 уТОГО ЛОСКОГО
элемента производится при движении клиПа 14 по ГОрИЗО ТаЛЬНОЙ плоскости ЛИ5 ты 15 до взаимодействия наг1равляю цей п.еч- ки 16 с не одвижнь.м .м 10 юворотной ланки 6, а на равляющей щечки 17 - с нижни.м челюсти 9 ножниц 7.
В качестве из -ибаемого материала могут 1 рименяться арматур Ь е 1рутки, а также арматурная роволока в мотках.
Переналадка гибочной машины на вы- уск изделий другой конфи Лфации осу- илествляется изменением 1рограммь ЧПУ или другой анало ичной а аратур автоматики.
0
5
Формула изобретения
1.Гибочная , содержащая установленный ш поворотный
диск с гибочп 1.1и элементами, противоупо- ры, , механизм взаимного осевог о е- ремещения опоры от осительно гибоч ых элементов и механизм резки с г риводом, отличающаяся ге.м, что, с целью расширения номенклатуры изготовляем 5 х издели11 и увеличения производительности, жена дополнительной в виде поворотной ланки, 1ривод перемещения оноры механизма резки и поворота планки вы1 олнен в виде связанного с силовым цилиндром с на 1рав: Я ощими щечка.ми, установленного .между опорой и плитой, нри этом в станины вы 1олне- на наклонная лоскость для взаимодействия с клином, а г ротивоупоры раз.мещены на станине с возможнос:тью пере.мещения в плоскости 1оворотного диска.
2.Машина Ю . 1, отличающаяся тем. что механизм резки в 11 1олне 1 в алли- гаторных ножниц.
7 W-5
23
ч N N
Фиг. 2 1ч«/1 да 11
////////
/
/.
/ / /
78/92
фуг. 5
тту//:
Составитель Е. Швец
Редактор О. ЮрковецкаяТехред И. ВересКорректор А. Зи.мокосов
Заказ 2993/6Тираж 731Подписное
ВНИИПИ Государственного комитета СССР по делам изобретений и открытий
113035, Москва, Ж-35, Раушская наб., д. 4/5 Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
Фиг.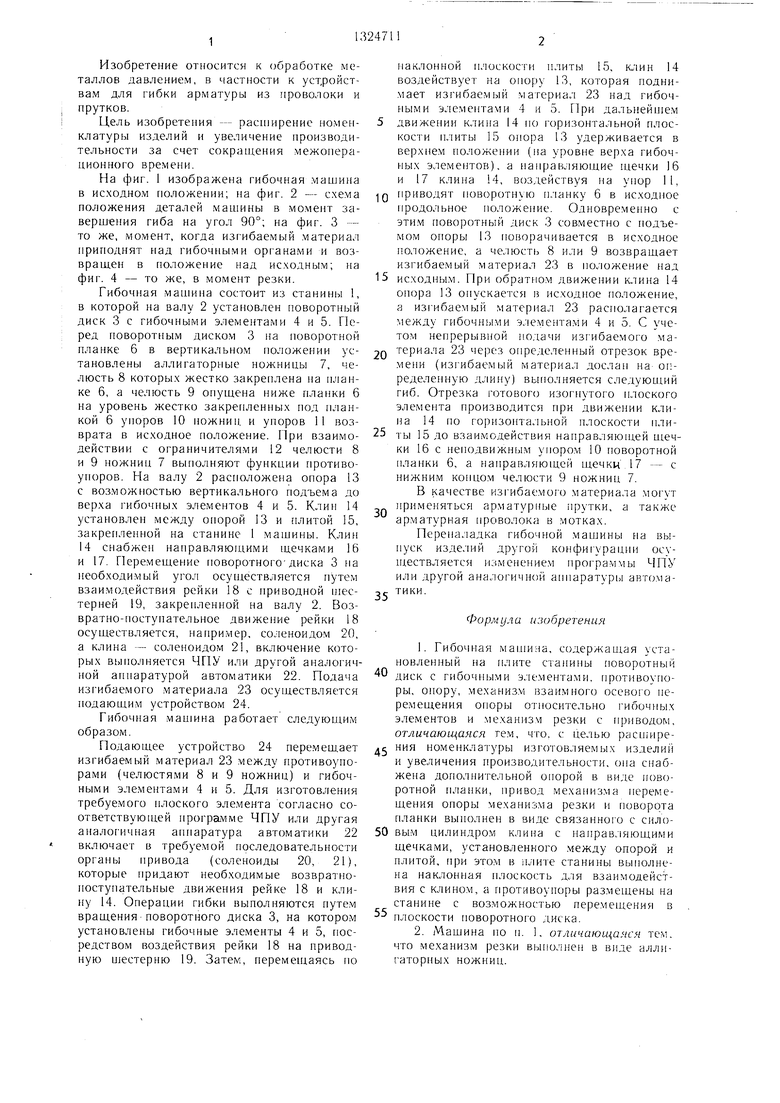
| название | год | авторы | номер документа |
|---|---|---|---|
| Трубогибочный автомат | 1986 |
|
SU1526871A1 |
| ВАЛКОВАЯ ГИБОЧНАЯ МАШИНА | 2006 |
|
RU2308340C1 |
| Машина для гибки трубных панелей | 1979 |
|
SU835563A1 |
| ГИБОЧНЫЙ СТАНОК ДЛЯ ИЗГОТОВЛЕНИЯ ЗМЕЕВИКОВ | 1967 |
|
SU200403A1 |
| СПОСОБ ПОЛУЧЕНИЯ ИЗДЕЛИЙ С КРИВОЛИНЕЙНЫМИ УЧАСТКАМИ ИЗ ПРОФИЛЬНЫХ ТРУБ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2012 |
|
RU2508958C1 |
| СПОСОБ ГИБКИ ПРОФИЛЬНЫХ ТРУБ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2365450C1 |
| Гибкая линия изготовления металлической тары | 1985 |
|
SU1328037A1 |
| Устройство для изготовления замкнутых строповочных петель из мерного отрезка заготовки | 1990 |
|
SU1787618A1 |
| УНИВЕРСАЛЬНЫЙ СТАН ХОЛОДНОЙ ПРОКАТКИ | 1997 |
|
RU2156173C2 |
| Устройство для гибки труб | 1980 |
|
SU978974A1 |
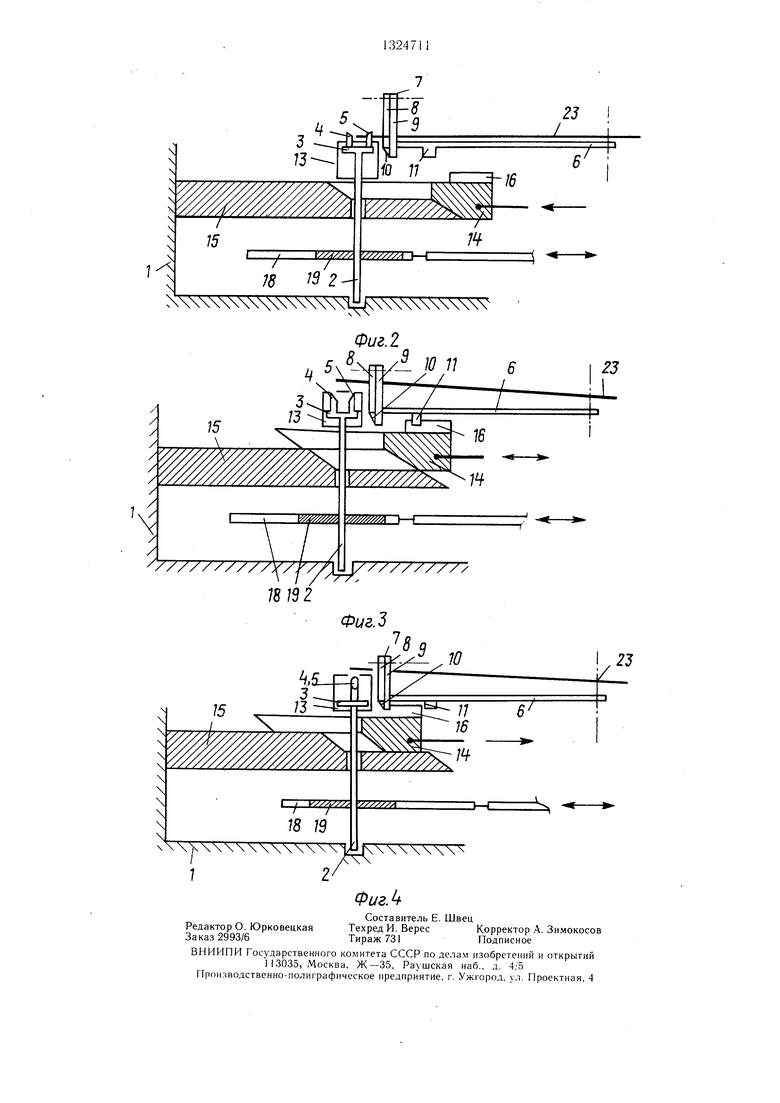
Изобретение относится к обработке металлов давлением, в частности к устройствам для гибки арматуры из проволоки и прутков. Цель изобретения - расширение номенклатуры изделий и увеличение производительности. Гибочная машина состоит из поворотного диска с гибочными элементами 4 и 5, противоупоров, опоры 13 механизма подъема опоры до верха гибочных элементов, механизма резки 7. Привод механизма подъема опоры и механизма резки выполнен в виде клина 14 с направляющими щечками 16 и 17, который расположен между опорой 13 и плитой 15 станины. Гибка выполняется при вращении поворотного диска. При движении клина по наклонной поверхности плиты происходит подъем опоры, а при дальнейшем движении клина направляющие щечки воздействуют на механизм резки и готовая деталь отрезается 1 з.п.ф-лы, 4 ил. (С (Л 00 to 4 Фиг,.1
| Электрогидравлический регулятор скорости гидротурбины | 1959 |
|
SU123231A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
| Способ очистки нефти и нефтяных продуктов и уничтожения их флюоресценции | 1921 |
|
SU31A1 |
