1
Изобретение относится к машино- стррению, в частности к созданию робототехнических комплексов для контактной точечной сварки, и может найти применение в различных отраслях промышленности.
Цель изобретения - повьшение производительности за счет автоматизации замены электродов.
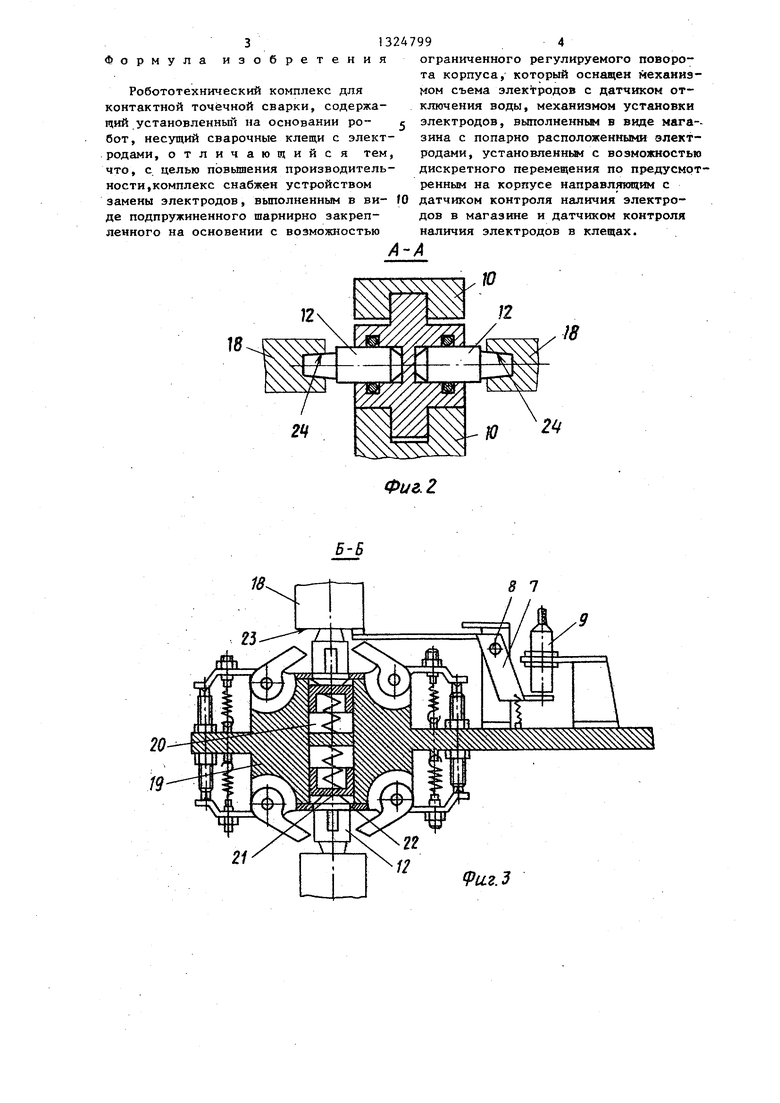
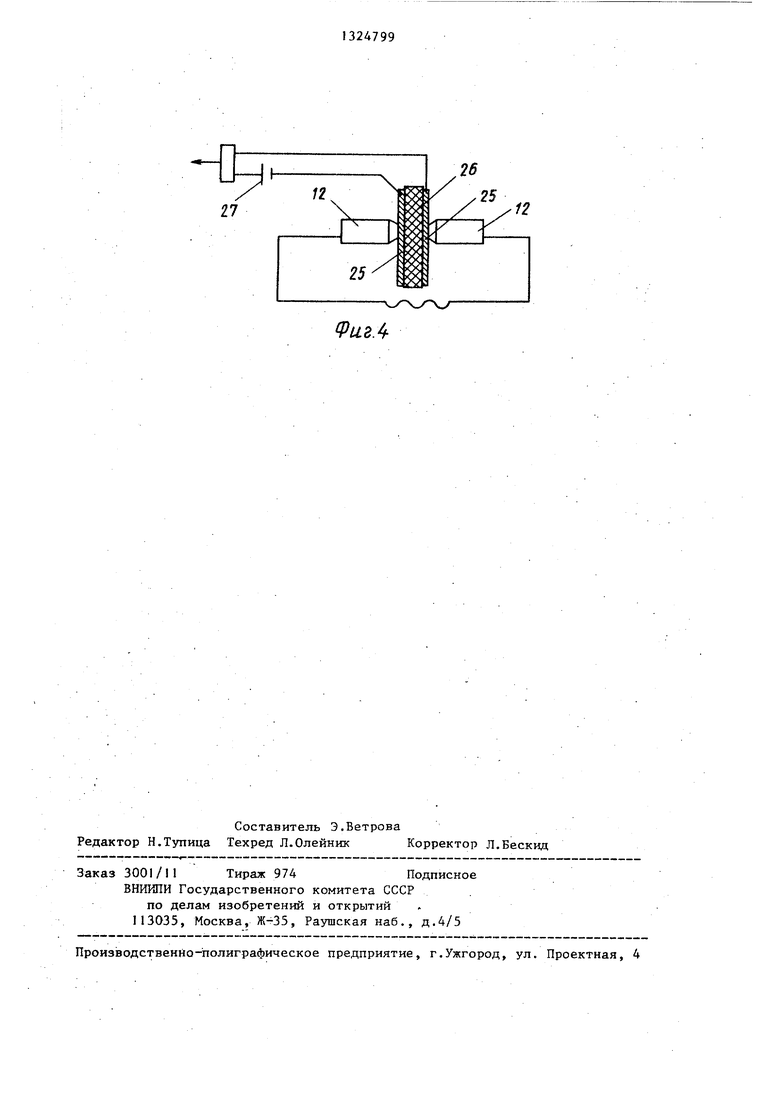
На фиг.1 показано устройство замены электродов, общий вид; на фиг.2 - разрез А-А на фиг.1; на фиг.З - разрез Б-Б на фиг.; на фиг.4 - схема электрической цепи дат- чшса наличия электродов в клещах.
Робототехнический комплекс содержит основание I, робот, несущий сварочные клещи, различное технологическое оборудование, устройства замены
13
электродов и оснастку
Устройство замены электродов содержит установленньй на основании 1 посредством шарнира 2 корпус 3. Корпус 3 выполнен с возможностью перемещения вокруг шарнира 2 с целью ком - пеНсации погрешности позиционирования робота. Роль компенсатора выполняет пружина 4, установленная между основанием 1 и корпусом 3, а перемещение корпуса 3 ограничено регулируемым упором 5.
На корпусе 3 расположены механизм 6 съема электродов с флажком 7, зак- репленньм шарниром 8 и датчиком 9
По дополнительной программе роб перемещает сварочные клещи к устро 5 ству замены электродов. Далее движ нием сварочных клещей сжимают элек рододержатели I8, вводя электроды 12 в механизм 6 съема электродов, при этом электрододержатели 18 сва 0 рочных клещей, упираясь поверхност 23 во флажок 7, перемещают флажок вокруг шарнира 8 и флажок, взаимодействуя с датчиком 9, формирует с нал на отключение подачи охлаждающ воды. Затем производится съем элек родов 12. Движением сварочных клещ электрододержатели 18 разводятся и роботом перемещаются к магазину II новыми электродами. Электрододержатели 18 движением сварочньк клещей сводятся и электроды 12 устанавливаются в гнезда 24 электрододержат лей сварочных клещей. Затем, не ра водя электрододержатели 18, движе- иием робота клещи перемещают магазин П на гааг установки электродов вьтодя на позицию установки новую пару электродов, о чем сигнализиру датчик 14, взаимодействуя с подпружиненным толкателем 13.
20
25
30
После перемещения магазина 11 н шаг электрододержатели 18 разводят ся и клещи движением робота подвод
отк йочения охлаждающей воды, механизм 35 к датчику 17 наличия электродов в
установки электродов, выполненный н виде двух направляющих 10, магазина 11 с электродами 12, подпружиненного толкателя 13 с датчиком 14 перемещения магазина, датчика 15 наличия электродов 12 в магазине 11 с флажком 16, а также датчика 17 контроля наличия электродов в электрододержа- телях 18 сварочных клещей.
Механизм 6 съема электродов (фиг.З) содержит корпус 1 9 с глухим центральным отверстием 20, в котором размещены подпружиненные выталкиватели 21. Соосно отверстию 20 на корпусе 19 установлены ловители 22. Электродо- де1Х1катель 18 имеет упорные поверх- ности 23, электроды 12 установлены в гнезда 24.
Датчик 17 выполнен из двух медных йластин 25, разделенных стенкой 26 из диэлектрика, а пластины подключены к источнику электрического тока - сварочному трансформатору 27.
-
р3247992
Предлагаемый комплекс работает следующим образом.
По дополнительной программе робот перемещает сварочные клещи к устрой- 5 ству замены электродов. Далее движением сварочных клещей сжимают элект- рододержатели I8, вводя электроды 12 в механизм 6 съема электродов, при этом электрододержатели 18 сва- 0 рочных клещей, упираясь поверхностью 23 во флажок 7, перемещают флажок 7 вокруг шарнира 8 и флажок, взаимодействуя с датчиком 9, формирует сигнал на отключение подачи охлаждающей воды. Затем производится съем электродов 12. Движением сварочных клещей электрододержатели 18 разводятся и роботом перемещаются к магазину II с новыми электродами. Электрододержатели 18 движением сварочньк клещей сводятся и электроды 12 устанавливаются в гнезда 24 электрододержате- лей сварочных клещей. Затем, не разводя электрододержатели 18, движе- иием робота клещи перемещают магазин П на гааг установки электродов, вьтодя на позицию установки новую пару электродов, о чем сигнализирует датчик 14, взаимодействуя с подпружиненным толкателем 13.
15
20
25
30
После перемещения магазина 11 на шаг электрододержатели 18 разводятся и клещи движением робота подводят
электрододержателях.
Затем движением клещей электродами 12 обжимаются пластины 25 датчика 17, при этом замыкается электрическая цепь: пластины 25 - клещи - вторичная обмотка трансформатора 27 сварочных клещей, в систему управления робота вьщается сигнал о том, что замена электродов произведена и поступает сигнал на подачу охлаждающей воды.
Когда магазин 11 освобождается от электродов 12, об их отсутствии сиг- 50 нализирует датчик 15, взагоюдействуя с флажком 16.
По этому сигналу оператором про - изводится замена пустого магазина.
Использование изобретения позволяет повысить производительность за счет автоматизации замены электродов и компенсации погрешности позиционирования робота.
55
Формула изобретения
Робототехнический комплекс для контактной точечной сварки, содержащий установленньп на основании ро- бот, несущий сварочные клещи с электродами, отличающийся тем что, с целью повышения производительности,комплекс снабжен устройством замены электродов, выполненным в ви- де подпружиненного шарнирно закрепленного на основении с возможностью
ограниченного регулируемого поворота корпуса, который оснащен механизмом съема злектродов с датчиком отключения воды, механизмом установки электродов, выполненньм в виде мага-- зина с попарно расположенньв ш электродами, установленньм с возможностью дискретного перемещения по предусмрт- ренньм на корпусе направляющим с датчиком контроля наличия электродов в магазине и датчиком контроля наличия электродов в клещах.
| название | год | авторы | номер документа |
|---|---|---|---|
| Сварочные клещи для контактной точечной сварки | 1985 |
|
SU1291333A1 |
| Клещи для контактной точечной сварки | 1990 |
|
SU1798088A1 |
| Устройство для шаговой подачи | 1986 |
|
SU1395440A1 |
| Робототехнический сборочно-сварочный комплекс | 1987 |
|
SU1537475A1 |
| Робот для контактной точечной сварки | 1985 |
|
SU1258654A1 |
| Механизм автоматической сварки пистона с траверзой анода к полуавтоматической линии сборки пакетов радиоламп | 1975 |
|
SU606176A1 |
| Машина для контактной точечной сварки жеребеечной ленты | 1977 |
|
SU748976A1 |
| Двухэлектродная головка для контактной сварки | 1990 |
|
SU1731542A1 |
| Клещи для сварочных точечных машин | 1989 |
|
SU1698014A1 |
| Автомат для сборки и сварки изделий | 1974 |
|
SU567569A1 |
Изобретение относится к машиностроению, в частности к созданию ро- бототехнических комплексов для контактной точечной сварки на базе гиб- .ких производственных систем, и может найти применение в различных отраслях промышленности. Целью изобретения является повьпвение производительности за счет автоматизации замены электродов. Робот перемещает сварочные клещи к устройству замены электродов. Клещи сжимают электродо- держатели, вводя электроды в механизм съема электродов 6. При этом формируется сигнал на отключение воды и производится съем электродов. Клещи разводятся и роботом перемещаются к магазину 11 с новыми электродами. Сварочные клещи сживаются, и электроды устанавливаются в электро- додержателе. Робот перемещает клещами магазин 11 на шаг расположения электродов, о чем сигнализирует датчик 14. Консоли клещей разводятся, и клещи подводятся к датчику наличия электродов в электрододержателях 17. При наличии электродов выдается сиг- . нал на подачу охлаждающей воды. Об освобождении магазина 11 от электродов сигнализирует датчик 15, взаимо- действукяций с флажком 16. 4 ил. W DO Ю 4 СО СО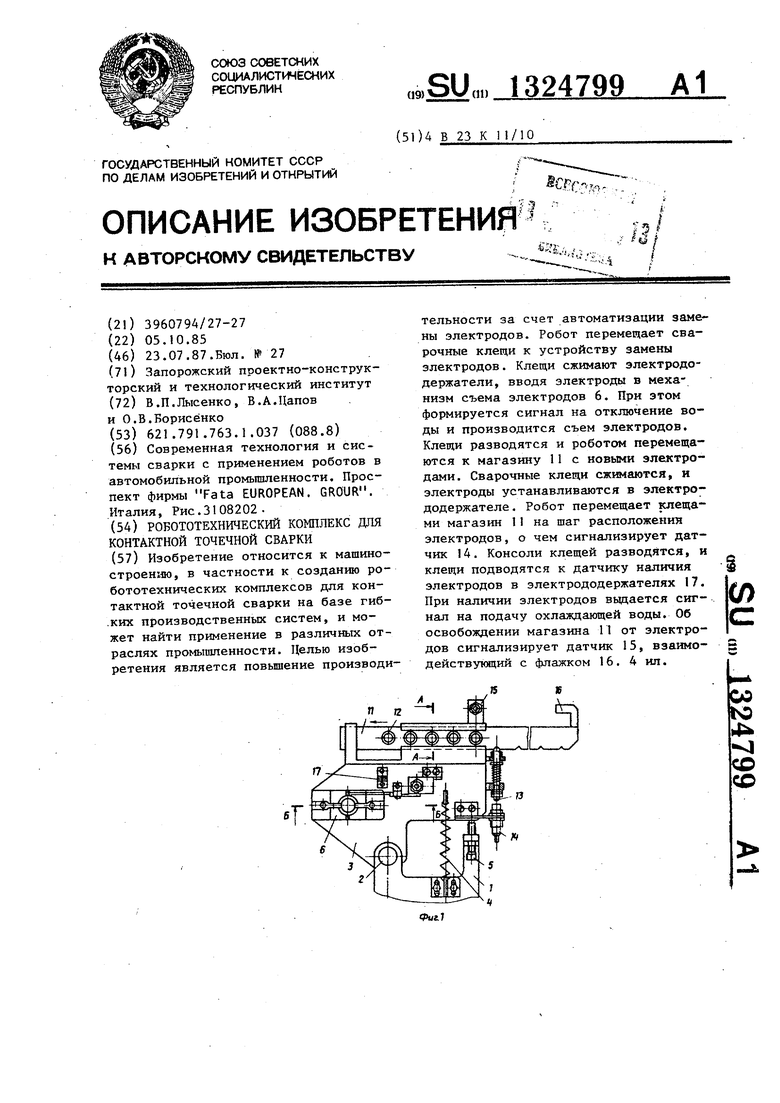
Фиг. 2
гз21
8 7
fpuz.3
26
12
Фив4
| Современная технология и системы сварки с применением роботов в автомобильной промышленности | |||
| Проспект фирмы Fata EUROPEAN | |||
| GROUR | |||
| Италия, Рис.3108202 . |
