Изобретение относится к захватным устройствам промышленных роботов для перемещения деталей.
Аналогом заявляемой конструкции является мембранный патрон [1]. Патрон имеет П-образную в сечении мембрану, пневмоцилиндр со штоком, к которому прикреплена мембрана, зажимные кулачки, установленные на мембране. К недостаткам данной конструкции следует отнести сложность изготовления мембраны, неполный контакт кулачков с деталью при зажиме, а также невозможность переустановки кулачков с целью переналадки на новый тип деталей.
Наиболее близким к заявляемому устройству прототипом является патрон мембранный [1], имеющий пневмоцилиндр одностороннего действия с пружинами, штоком и поршнем, плоскую мембрану с привернутыми на ней кулачками и противовесами. Торцевые упоры жестко установлены в корпусе патрона.
Данное устройство имеет следующие недостатки. Во-первых, жесткие кулачки при деформировании мембраны в процессе зажима имеют некоторый угол поворота, что приводит к образованию точечного контакта с деталью, увеличивающего локальное давление на стенку тонкостенной детали и способное привести к ее необратимому деформированию. Во вторых, данный патрон не позволяет переставлять зажимные кулачки в новое положение применительно к детали другого размера.
Задачами настоящего изобретения являются стабилизация контактного давления кулачков на тонкостенную деталь, обеспечение возможности поворота кулачков при деформировании мембраны в процессе зажима и быстрой переустановки кулачков в новое положение при необходимости перемещения роботом детали других размеров.
Эти задачи разрешаются за счет того, что на мембране закреплены промежуточные базирующие пластины из немагнитного материала с центральными отверстиями в форме усеченной пирамиды. Снизу от установочных отверстий запрессованы постоянные магниты, связанные магнитным потоком с входящими в отверстия пластин центральными выступами корпусов кулачков, выполненных из ферромагнитного материала. Корпуса кулачков имеют возможность их переустановки по отношению к базирующим пластинам. Кроме того, кулачки установлены по отношению к корпусам на плоских пружинах и имеют возможность переустановки по всем сторонам корпусов. Быстрая переустановка кулачков обеспечивается наличием осесимметричного сжимающего механизма, который имеет верхний и нижний упоры. Нижний упор подпружинен относительно мембраны, а верхний упор контактирует с внутренними концами рычагов, установленных на осях в пазах базирующих пластин, профрезерованных в каждой из пластин от отверстия до ее края в сторону оси схвата. Наружные концы рычагов упираются в нижние торцы выступов корпусов кулачков.
Конструкция схватов поясняется чертежами.
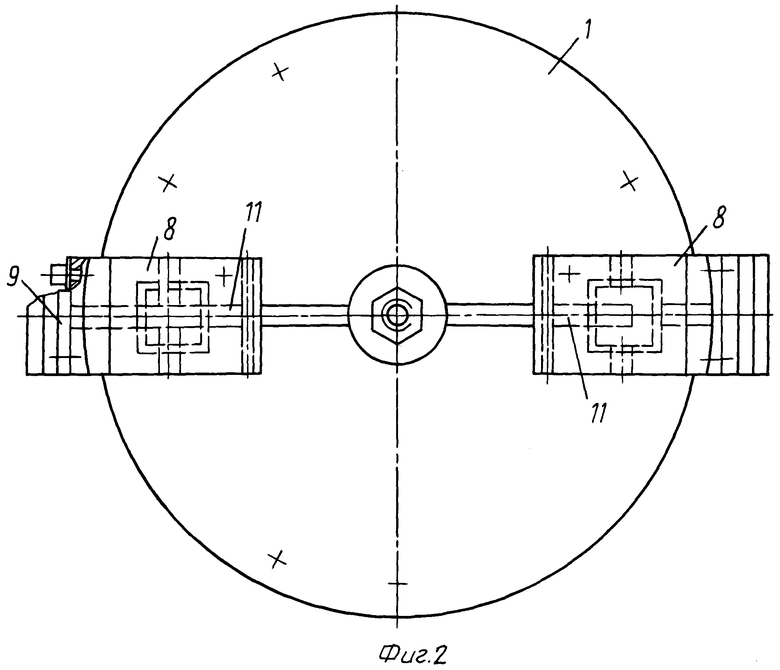
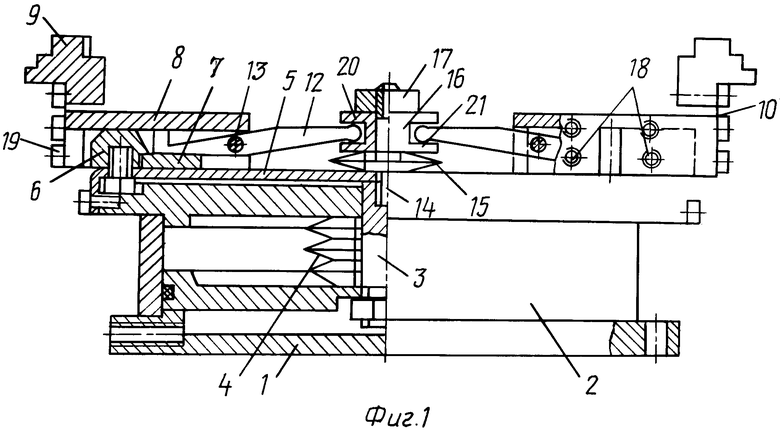
На фиг.1 приведен разрез схвата, а на фиг.2 - вид на схват со стороны детали.
Изображенный на фиг.1 фланец 1 служит основанием для пневмоцилиндра 2, имеющего поршень со штоком 3 и возвратные пружины 4. На выходном конце штока закреплена мембрана 5, на которой смонтированы промежуточные базирующие пластины 6. Пластины имеют центральные отверстия в форме усеченной пирамиды с сужением в направлении к мембране. Снизу от данных отверстий запрессованы постоянные магниты 7. Пластины имеют соединенные с отверстиями пазы 11, профрезерованные от отверстий в сторону оси схвата. На пластине установлены корпуса кулачков 8, выступы которых плотно входят в аналогичные по форме отверстия пластин 6. Кулачки 9 установлены на плоских пружинах с помощью винтов 19 по наружным торцам корпусов 8. В пазах базирующих пластин на осях 13 смонтированы выталкивающие рычаги 12. Последние своими наружными концами упираются в нижние торцы выступов корпусов кулачков 8, а внутренними концами - в верхний упор 20 сжимающего мезанизма 16, например резьбового. Сжимающий механизм через нижний упор 21 подпружинен относительно мембраны пружиной 15, а сверху него установлена гайка 17, завинченная на шпильку 14, служащая для перемещения упоров сжимающего механизма.
Схват работает следующим образом. При подаче давления воздуха в пневмоцолиндр 2 поршень со штоком 3 перемещаются, сжимая пружины 4, и деформируют мембрану 5 вверх. При этом кулачки 9 разжимаются.
После снятия давления пружины 4 перемещают шток 3, деформируя мембрану 5 вниз, сдвигая таким образом кулачки 9 к оси схвата. За счет упругости пружин 10 кулачки имеют возможность поворачиваться при деформировании мембраны относительно детали, обеспечивая полный поверхностный контакт с последними при наименьшем локальном давлении.
Корпуса кулачков 8 за счет своих выступов в форме усеченной пирамиды плотно втягиваются постоянными магнитами 7 в соответствующие отверстия базирующих пластин 6. Наличие уклонов в отверстиях пластин 6 и входящих в них аналогичных по форме выступов корпусов кулачков 8 позволяет увеличить удерживающее усилие постоянных магнитов 7 за счет сил трения в несколько раз. Для быстрой переустановки корпусов с кулачками служат рычаги 12. При закручивании гайки 17 сжимающего механизма 16 его верхний упор поворачивает рычаги 12 относительно своих осей 13. При этом наружные концы рычагов давят на нижние торцы выступов корпусов 8 и выталкивают их вместе с кулачками 9 из отверстий пластин 6. При вывинчивании гайки 17 пружины 15 возвращают упоры сжимающего механизма вместе с рычагами в исходное положение. При изменении размеров детали, устанавливаемой в схват, корпуса 8 могут быть повернуты относительно базирующих пластин 6 и закреплены с помощью магнитов в новом положении. Кулачки 9 винтами 19 могут быть по отверстиям 18 установлены на другой стороне данных корпусов.
Таким образом, тонкостенная деталь может быть при использовании данной конструкции охвата надежно и мягко закреплена кулачками перед своим перемещением, а сами кулачки имеют возможность быстрой переустановки для закрепления детали другого размера.
Источники известности
1. Станочные приспособления. Справочник, в 2-х т./ Ред. совет Б.Н.Вардашкин (пред.) и др. - Машиностроение, 1984 - Т. 2/ Под ред. Б.Н.Вардашкина, В.В.Данилевского, 1984, 656 с., ил., стр.516.
2. Технологическая оснастка машиностроительных производств. Учебное пособие./ Составитель А.Г.Схиртладзе: в 2 ч. МГТУ “Станкин”, 1998. - Ч. 1. - с. - табл. 2000. ил. 5200. Библиогр.
| название | год | авторы | номер документа |
|---|---|---|---|
| Вакуумный схват манипулятора | 1986 |
|
SU1421533A1 |
| СХВАТ ПРОМЫШЛЕННОГО РОБОТА | 1996 |
|
RU2096167C1 |
| Измерительный схват | 1986 |
|
SU1395481A1 |
| Схват робота | 1990 |
|
SU1761463A1 |
| Загрузочное устройство | 1985 |
|
SU1301630A1 |
| Многоместный патрон | 1981 |
|
SU952462A1 |
| Промышленный робот | 1982 |
|
SU1125127A1 |
| Гибкий производственный модуль | 1986 |
|
SU1315222A1 |
| Схват манипулятора | 1985 |
|
SU1498608A1 |
| Групповой схват промышленного робота | 1988 |
|
SU1535714A1 |
Изобретение относится к области робототехники, а именно к захватным устройствам промышленных роботов для перемещения деталей. Схват содержит пневмоцилиндр одностороннего действия с пружинами, поршнем и штоком, связанным с мембраной, на которой установлены зажимные кулачки. На мембране закреплены промежуточные базирующие пластины из немагнитного материала с центральными отверстиями, выполненными по форме усеченной пирамиды, снизу от которых запрессованы постоянные магниты, связанные магнитным потоком с входящими отверстиями пластин аналогичными по форме выступами корпусов кулачков. Кулачки установлены на корпусах кулачков на плоских пружинах с возможностью их переустановки по отношению к корпусам. Схват снабжен осесимметричным по отношению к штоку пневмоцилиндра сжимающим механизмом, например резьбовым, с верхним упором и нижним упором, подпружиненным относительно мембраны. Изобретение позволит стабилизировать контактное давление кулачков на тонкостенную деталь, быструю переустановку кулачков в новое положение при необходимости перемещения деталей других размеров. 2 з.п. ф-лы, 2 ил.
| Захват | 1985 |
|
SU1271744A1 |
| Схват очувствленного робота | 1984 |
|
SU1227464A1 |
| УСТРОЙСТВО ДЛЯ МЕХАНИЧЕСКОЙ ОБРАБОТКИ | 1993 |
|
RU2085400C1 |

