Изобретение относится к машиностроению и приборостроению и может быть использовано в автоматическом сборочпом обо- рудовании.
Целью изобретения является новышение качества сборки за счет исключения повреждения noeepxHOcfefl сопрягаемых детален.
На фиг. 1 изображено положение собираемых деталей в момент их контакта; на фиг. 2 - то же, при сообщении одной из них поискового движения.
Процесс сборки осундествляется следующим об1)азом.
Втулка 1 неподвижно закрепляется на позиции сборки, а вал 2 захватывается промышленным роботом (не показан), схват 3 которого соединеп с конечным элементом робота с помощью упругих элементов, и транспортируется в зону сборки и поджимается к торцовой поверхности втулки 1 с некоторой силой. При несовпадении осей втулки i и вала 2 (фиг. 1) он наклоняется, что регистрируется датчиком (не показан) .
По сигналу датчика схват 3 вначале наклоняет вал 2 в нлоскости, перпендикулярной торцовой поверхности втулки 1 и плоскости, проходящей через оси собираемых деталей в момент их поджима, а за5
0
5
тем сообщает ему врапгение вокруг своей оси в направлении оси втулки 1 (фиг. 2). При этом вал 2 катится по фаске или торцовой поверхности втулки 2 без скольжения, до совпадения осей собираемых деталей, что регистрируется датчиком, после чего поисковое движение вала 2 прекращается и производится сопряжение деталей.
Формула изобретения Способ манипулирования при получении соединений типа вал-втулка, при котором втулку устанавливают неподвижно, а вал ориентируют посредством захватного устройства, транспортируют в зону сборки, поджимают к торцовой поверхности втулки, наклоняют и сообщают ему поисковое движение, при этом регистрируют уменьще- ние усилия поджатия при совпадении сопрягаемых поверхностей деталей, после чего производят сборку, отличающийся тем, что, с целью повыщения качества сборки, вал наклоняют так, чтобы его ось и ось втулки лежали в одной плоскости, после чего вал дополнительно наклоняют в плоскости, перпендикулярной указанной плоскости и торцовой поверхности втулки,и сообщают ему вращение вокруг собственной оси в направлении оси втулки.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ манипулирования | 1981 |
|
SU984791A1 |
| Устройство для сборки деталей типа вал-втулка | 1985 |
|
SU1284767A1 |
| СПОСОБ СБОРКИ ДЕТАЛЕЙ ВАЛ-ВТУЛКА | 2013 |
|
RU2542201C2 |
| Устройство для сборки | 1985 |
|
SU1271701A1 |
| Способ сборки многоэлементных конструкций и устройство для его осуществления | 1987 |
|
SU1458126A1 |
| Устройство для автоматической сборки деталей | 1989 |
|
SU1703346A2 |
| Схват | 1985 |
|
SU1284828A1 |
| Сборочно-захватная головка манипулятора | 1984 |
|
SU1191281A1 |
| Захват манипулятора | 1985 |
|
SU1288057A1 |
| Устройство для автоматической сборки деталей | 1987 |
|
SU1495039A1 |
Изобретение относится к машиностроению и приборостроению и позволяет осуществлять сборку соединений типа вал- втулка без повреждения их рабочих поверхностей. Перед началом сборки детали втулка 1 устанавливается неподвижно, а вал 2 с помощью схвата 3 транспортируется в зону сборки и поджимается к торцовой поверхности втулки 1 с некоторой силой, величина которой контролируется. При этом вал 2 наклоняется так, что его ось и ось втулки лежат в одной плоскости. Далее вал 2 наклоняют в плоскости, перпендикулярной указанной выше плоскости и торцовой поверхности втулки, а затем сообщают ему вращение вокруг собственной оси в направлении от втулки. При совпадении осей сопрягаемых поверхностей, о котором судят по величине усилия поджима, вращение вала прекращается и осуществляется сборка. 2 ил. (Л со ьо 00 со фиг. 1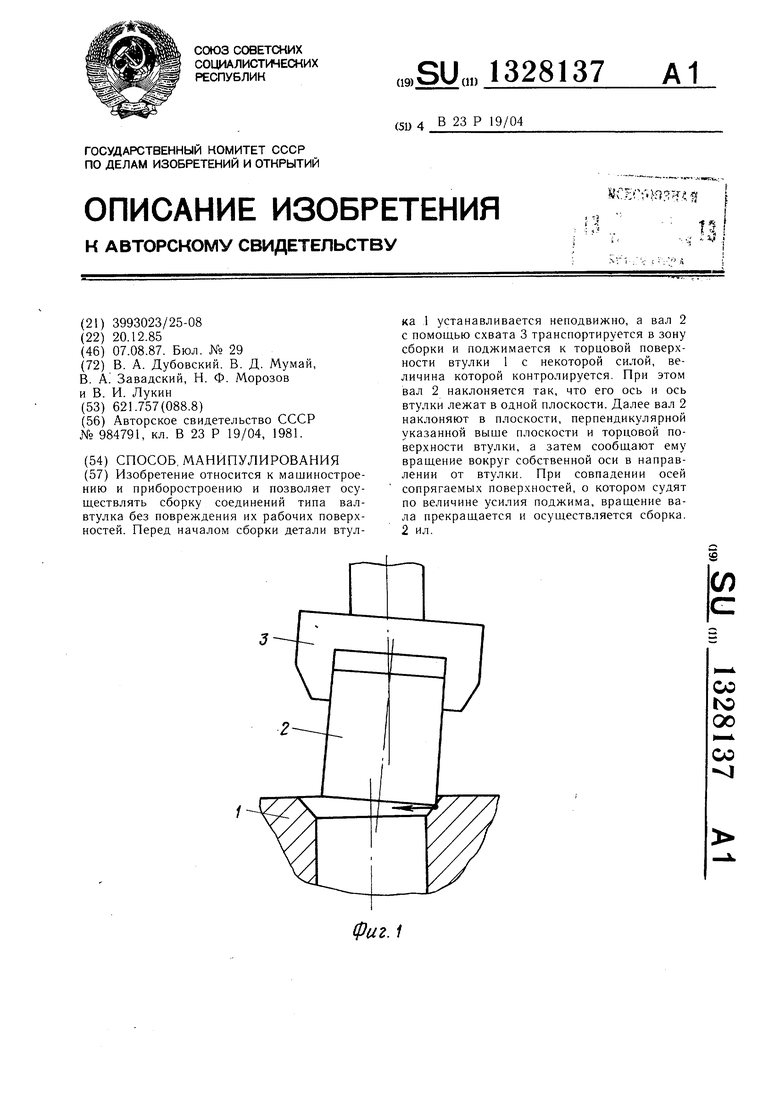
Фиг. 2
Редактор (. IlcKapi 3;|к;13 :М:5 1/;7
Составитель В. Судков
Техред И. ВересКорректор А. Обручар
Тираж 974Подписное
ВПШ-ИИ- Государственного комитета СССР гш делам изобретений и открытий
1 13033, Москва, Ж-35, Раушекая иаб., я. 4/5 Производственно-полиграфическое предприятие, г. Уж1 ород, ул. Проектная. 4
| Способ манипулирования | 1981 |
|
SU984791A1 |
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
