Изобретение относится к станкостроению и может быть использовано в средствах перегрузки приспособлений-спутников при создании гибких производственных систем.
Целью изобретения является упрощение конструкции.
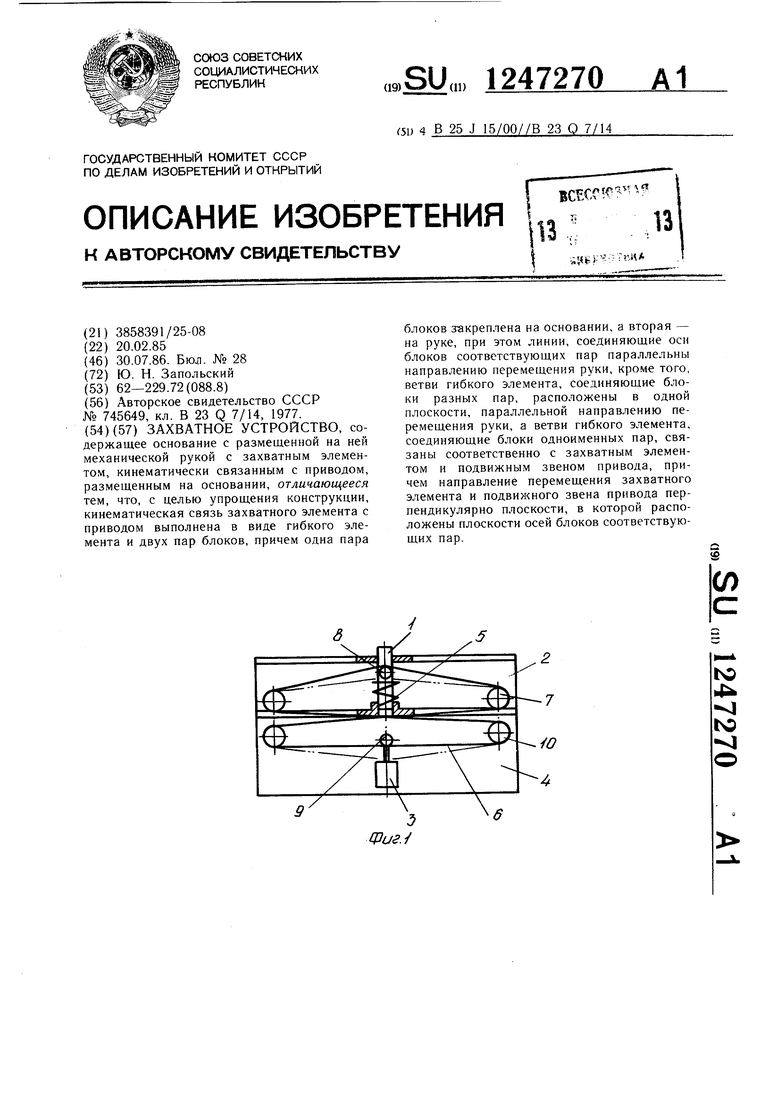
На фиг. 1 схематически представлено уст- рйство в исходном положении руки транспортного робота, общий вид; на фиг. 2 - то же, при выдвинутой руке; на фиг. 3 - схема устройства с телескопической рукой; на фиг. 4 - сечение А-А на фиг. 3.
Захватное устройство содержит захватный элемент - палец 1, установленный на руке 2 с возможностью перемещения, привод пальца в виде электромагнита 3, установленного на основании 4, пружину 5, установленную между рукой 2 и пальцем 1, гибкий элемент в виде каната 6, перекинутого через блоки 7, установленные на концах руки 2, блок 8, закрепленный на пальце, блок 9 - на электромагните 3 и блоки 10 - на основании 4. Ветви каната 6, находящегося между блоками 7 и 10, параллельны. При выдвижении руки 2 возможно перемещение пальца на величину, пропорциональную величине непараллельности указанных ветвей (фиг. 1).
В захватном устройстве телескопической руки транспортного робота (фиг. 3) канат б дополнительно огибает блоки 11, установленные по краям ползуна 12. Такое рещение
позволяет сократить габариты транспортного робота, используемого в гибких производственных системах.
В захвате руки транспортного робота (фиг. 4) канат б соединен с пальцем 1 своими концами. В этом случае исключается блок,
0 установленный на пальце.
Захватное устройство работает следующим образом.
Для выдвижения пальца 1 срабатывает
с электромагнит 3. Ветвь каната б между блоками 10 прогибается, при этом ветвь каната б между блоками 7 выпрямляется, сжимая пружину 5 и выдвигая палец 1. Для того, чтобы вернуть палец в исходное положение достаточно обесточить электромагнит 3. При
0 этом пружина 5 прогнет ветвь каната б между блоками 7 и вернет палец 1 в исходное положение.
Использование предлагаемого технического решения захвата руки транспортного робота позволяет снизить затраты на изготовление за счет упрощения конструкции.
Фиг. г.
сригь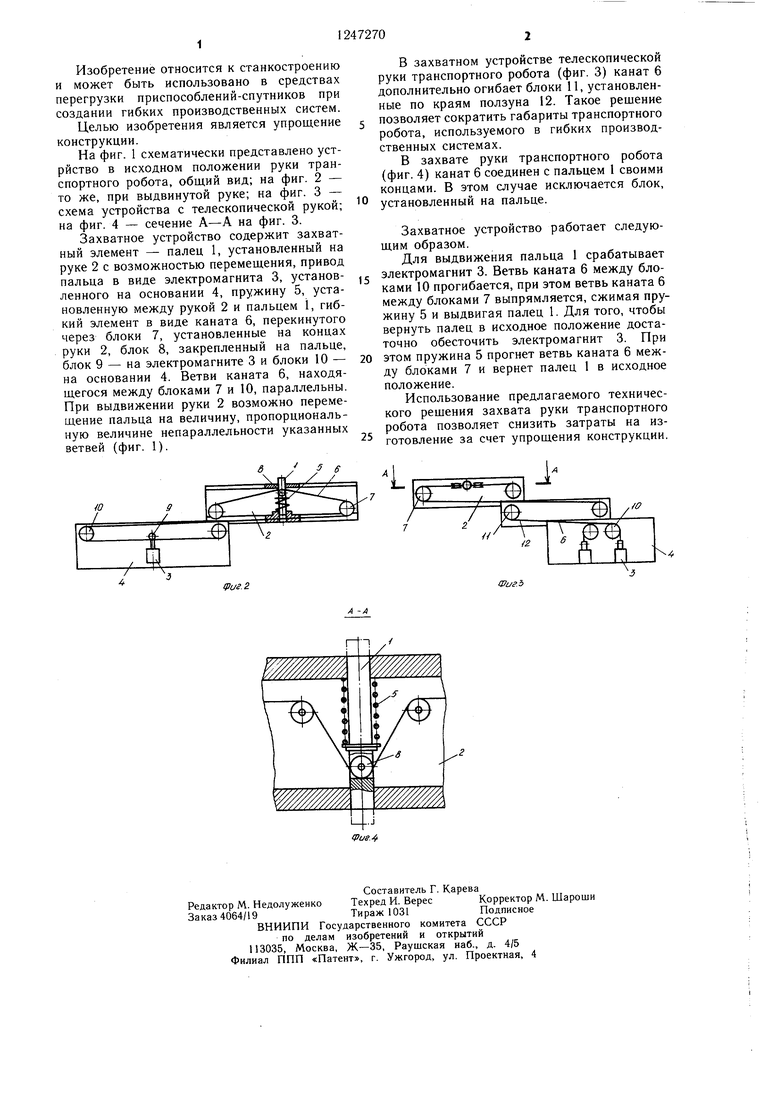
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор для герметизированного пространства | 1988 |
|
SU1618651A1 |
| Устройство для перемещения груза | 1987 |
|
SU1481151A1 |
| Промышленный робот | 1988 |
|
SU1616812A1 |
| Промышленный робот | 1988 |
|
SU1530436A1 |
| Промышленный робот | 1986 |
|
SU1335446A1 |
| Рука транспортного робота | 1985 |
|
SU1328195A2 |
| Гибкий производственный модуль | 1987 |
|
SU1541017A1 |
| ЗАХВАТ ПРОМЫШЛЕННОГО РОБОТА | 1992 |
|
RU2022782C1 |
| УСТРОЙСТВО ДЛЯ ПОШТУЧНОЙ ВЫДАЧИ ЗАГОТОВОК | 1990 |
|
RU2023572C1 |
| Автоматическая линия горячей штамповки | 1988 |
|
SU1538980A1 |
Составитель Г. Карева
Редактор М. НедолуженкоТехред И. ВересКорректор М. Шароши
Заказ 4064/19Тираж 1031Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий
113035, Москва, Ж-35, Раушская наб., д. 4/5
Филиал ППП «Патент, г. Ужгород, ул. Проектная, 4
| Металлорежущий станок с устройством для автоматической смены обрабатываемых деталей | 1977 |
|
SU745649A1 |
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
