Изобретение относится к ма1г.:шострое- нию и может найти применение в качестве захватных устройств манипуляторов во всех отраслях народного хозяйства.
Цель изобретения - расширение технологических возможностей за счет обеспечения захвата нескольких деталей с их одновременным центрированием.
На чертеже изображено захватное устройство, общий вид.
Захватное устройство содержит корпус 1 и поворотное кольцо 2, установленные с возможностью их взаимного проворота и связанные с приводом (не показан). В корпусе 1 расположены оси 3, а в поворотном кольце 2 - оси 4. Оси 3 и 4 поочередно связаны с упругим кольцом 5, на котором закреплены захватные рычаги б и 7, несущие на концах подпружиненные в осевом направлении губки 8 и 9.
Захват работает следующим образом.
Для зажима объекта захват вводится в рабочую зону, а захватные рычаги располагаются у паруж 10Й или внутренней поверхности объекта в зависимости от его конфигурации. Корпус 1 и поворотное кольцо 2 разворачиваются приводом в разных направлениях, при этом в зонах сближения осей 3 и 4 происходит выгибание участкои упругог О кольца 5 и закрепленные на нем захватные рычаги 6 губками 8 зажимаю- - объект по внутренней поверхности, а в зонах удаления осей 3 и 4 происходит выпрямление участков упругого кольца и закрепленные на нем захватные рычаги 7 -убками 9 зажимают объект по внутренней поверхности. При изменении направлепий проворота в зонах удаления осей 3 и 4 происходит выпрямление участков упругого кольца 5 и закрепленные на нем захватные рычаги 6 губками 8 зажимают объект по внешней tio- верхности, а в зонах сближения осей 3 и 4
0
5
0
5
происходит прогибание участков упругого кольца 5 и закрепленные на нем захватные рычаги 7 губками 9 зажимают объект по внешней поверхности. Освобождение объектов осуществляется в обратной последовательности. Подпружиненность губок 8 и 9 в осевом направлении позволяет исключить часть губок при захвате деталей сложной конфигурации. Захват хрупких объектов без их повреждения обеспечивается закреплением захватных рычагов 6 и 7 на упругом кольце, а при работе с объектами неправильной геометрической формы обеспечивается надежность захвата, которая достигается за счет деформируемости упругого кольца.
За счет упругосги кольцй с чередующимися вогнутыми и выпуклыми относительно оси устройства участками обеспечивается захват хрупких объектов, объектов непра- вил;,ной геометрической формы, захват нескольких деталей с их одновременным центрированием.
Формула изобретения
Захватное устройство, содержащее корпус, поворотное кольцо с приводом и захватные рычаги, каждый из которых установлен на упругом элементе, связанном с корпусом и поворотным кольцом, отличающееся тем, что, с целью расширения технологических возможностей за счет обеспечения захвата нескольких деталей с их одновременным центрированием, упругий .элемент, выполнен в виде но меньшей мере одного кольца с чередующимися вогнутыми и выпуклыми относительно оси устройства, участками, точки перехода с одного участка на другой которого поочередно связаны с корпусом и поворотным кольцом, при этом захватные рычаги закреплены в точках перегибов вогнутых и выпукльлх участков кольца.
| название | год | авторы | номер документа |
|---|---|---|---|
| Захватная головка манипулятора | 1986 |
|
SU1342727A1 |
| Захват манипулятора | 1978 |
|
SU722758A1 |
| Схват манипулятора | 1986 |
|
SU1366393A1 |
| Захватное устройство промышленного робота | 1985 |
|
SU1313697A1 |
| Захват манипулятора | 1990 |
|
SU1779582A1 |
| Приспособление к манипулятору для захвата и удаления полых деталей | 1975 |
|
SU527286A1 |
| Схват промышленного робота длябОбиН C пРяжЕй | 1979 |
|
SU806406A1 |
| Захватное устройство | 1984 |
|
SU1237423A1 |
| Групповой схват | 1986 |
|
SU1333576A1 |
| Схват манипулятора | 1986 |
|
SU1390019A1 |
Изобретение относится к области машиностроения и может быть использовано в захватных устройствах манипуляторов. Целью изобретения является расширение технологических возможностей за счет обеспечения захвата нескольких деталей с их одновременным центрированием. Это достигается тем, что в устройстве захватные рычаги 6 закреплены на упругом элементе - замкнутом кольце 5, связанном с корпусом 1 и поворотным кольцом 2, при этом губки захватных рычагов подпружинены и размещены в них с возможностью возвратно- поступательного перемещения. 2 ил. (Л со со со 05 со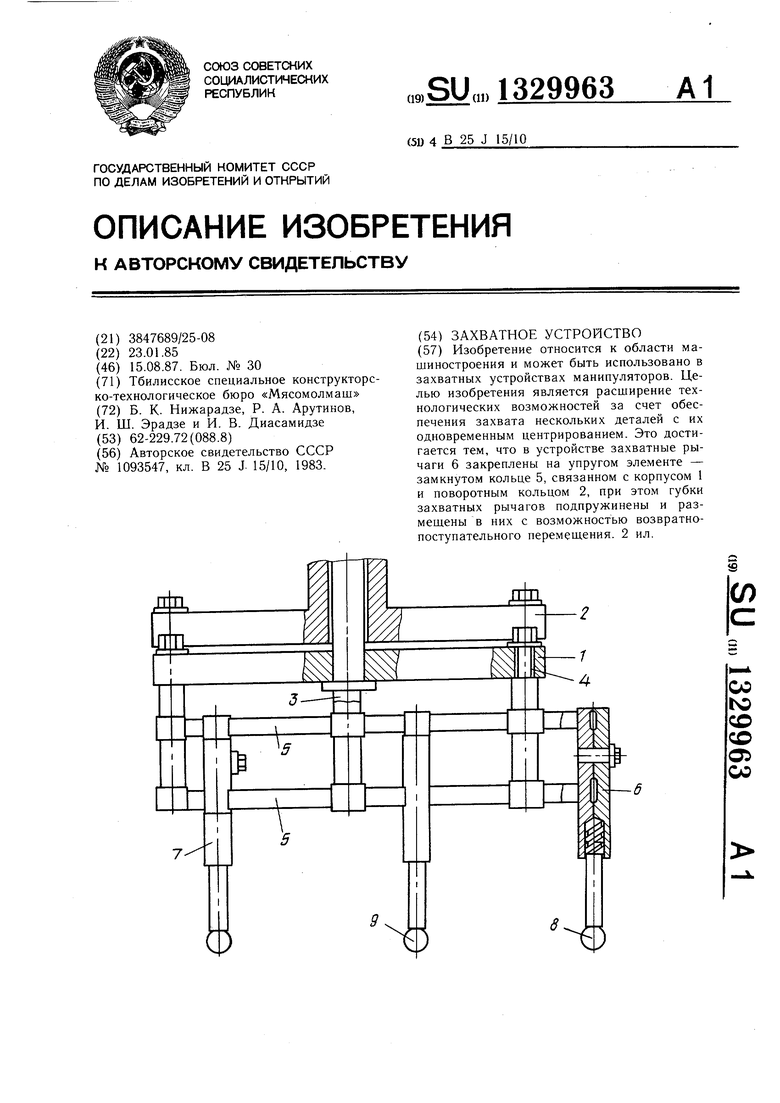
| Схват манипулятора | 1983 |
|
SU1093547A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
