приставку 5, выполненную в виде пово ротных от храпового механизма 8 роторов 6, снабженных механизмом подачи штучных изделий или сыпучих материалов, привод которого содержит пол зуи, механизмом блокировки подачи и переталкивателями заготовок. Привод храпового механизма выполнен в виде рычага, на который могут воздействовать патроны стеклообрабатывающего ротора и который в свою очередь кон1
. Изобретение относится к тепловой обработке стекля.нных трубок и может быть использовано в химической, медицинской и горно-добывшощей промышленности.
Цель изобретения - упрощение конструкции.
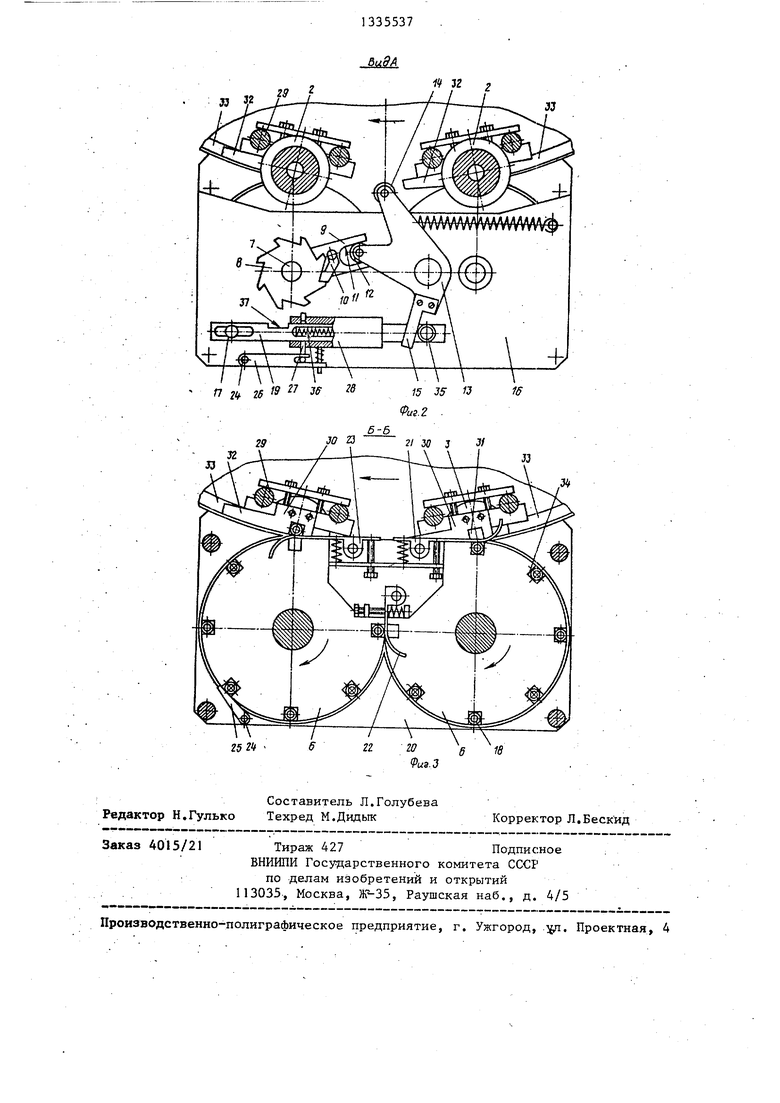
Pia фиг. 1 изображено устройство для обработки стеклянных трубок, общий вид; на фиг. 2 - вид А на фиг. 1 на фиг. 3 - разрез на фиг. -1.
Устройство для обработки стеклян- , ных трубок содержит стеклообрабаты- вающий-ротор 1 с верхними 2 и нижними 3 патронами, рядом с которым на раме 4 установлена приставка 5, состоящая из одного или нескольких дополнительных роторов 6. На валу 7 ведущего дополнительного ротора 6 расположены храповое колесо 8 и водило 9 с собачкой 10. В пазу 11 водила 9 располагается ролик 12, з акреплен- ный на рычаге 13 храпового механизма, на котором расположены также ролик 14 и упор 13. На верхней плите 16 приставки 5 установлен механизм 17, обеспечивающий подачу штучных изделий или сыпучих материалов в заготовку 18, Перемещение элементов механизма 17 осуществляют ползуном 19. На нижней плите 20 закреплены подпружиненные рычаги 21-23 переталкивате- лей, В плите 16 расположена ось 24, с одной стороны которой закреплен щу
25,а с другой - подпружиненный рыча
26,связанный с фиксатором 27, установленным в корпусе 28 механизма 17. На колонках 29 стеклообрабатывающего ротора 1 закреплены ограничители 30,
35537
тактирует с ползуном привода механизма подачи. Перета:1киватели выполнены в виде подпружиненных рычагов со скосами, со стороны подхода трубок на стеклообрабатывающем роторе закреплены ограничители, снабженнь1е гнездами, расположенными соосно с патронами ротора. Изобретение позволит автоматизировать трудоемкие операции снаряжения Б массовом производстве индикаторных трубок. 3 ил.
имеющие с одной, стороны соосные с патронами гнезда .31 для трубок,, а с другой - выступы 32, контактирующие с трубками при переходе их Из дополнительного ротора 6 в стеклообраба- тывающий ротор 1. Приставка 5 выполнена со столиками 33, поддерживающими трубки при переходе из ротора в -ротор. Дополнительные роторы 6 выполнены с гнездами 34. На ползуне 19 закреплены ролик 33 и пружина 36, а также выполнен паз 37. Кинематичес- связь между дополнительными рото5 рами осуществляют системой шестерен (не показана).
Устройство работает следующим образом.
Заготовку 18.подают в стеклообра0 батывающий ротор 1 и захватывают патронами 2 и 3. В процессе перемещения заготовки 18 ее нагревают, после чего производят формование. Далее нижний патрон 3 освобождает заготов5 ку 18 и опускается ниже уровня столика 33 приставки 3.
Когда под заготовкой 18 оказывается столик 33, верхний патрон 2 раскрывается и заготовка 18 оказывается
п на столике 33. Дальнейщее движение заготовки 18 по окружности стеклообрабатывающего ротора 1 при раскрытых патронах 2 и 3 обеспечивают ограничители 30, снабженные гнездами 31.
При подходе заготовки 18 к ведомо му дополнительному ротору 6 она отклоняет подпружиненный рычаг 21, который в момент совпадения гнезда 31 с гнездом 34 дополнительного ротора 6 переталкивает зах отовку 18 в гнез-
до 34, При повороте ротора 6 выпадению заготовки 18 препятствуют верхняя 16 и нижняя 20 плиты приставки 5. При движении э аготовки 18 по ведомому дополнительному ротору 6 происходит ее охлаждение, а по ведущему - подача штучного изделия или сыпучего ма:тери- ала, например при изготовлении индикаторных трубок.
Поворот дополнительных 6 роторов происходит в то время, когда верхний 2 патрон ротора I воздействует на ролик 14 рычага 13, При этом рычаг 13 поворачивается и роликом 12 перемещает водило 9 с собачкой 10.
Одновременно упор 15 рычага 13 подходит к ролику 35, закрепленному на ползуне 19, и отводит поеледний.деформируя пружину 36, В конце хода ползуна 19 его паз 37 оказывается напротив фиксатора 27, Рабочий ход механизма 17 осуществляется за счет пружины 36. В том случае, если на позиции под механизмом 17 нет заготовки 18, щуп 25 вместе с подпружиненным рычагом 26 поворачивается и фиксатор 27 входит в паз 37, препятствуя перемещению ползуна 19 при обратном ходе рычага 13.
В случае наличия заготовки 18 при отходе рычага 13 осуществляется рабочий-ход механизма 17, Передача заготовки 18 из ведомого ротора 6 в ведущий происходит в зоне совпадения их гнезд под воздействием подпружиненного рычага 22 переталкивателя, В зоне передачи заготовки 18 в ротор 1, до подхода патронов 2 и 3, ее удерживает от выпадения выступ 32 ограничителя 30, При совпадении гнезд подпружиненный рычаг 23 переталкива- теля смещает заготовку 18 в гнездо 31, При дальнейшем движении заготов
ки 18 по столику 33 происходит ее подъем к верхнему 2 патрону ротора 1. Патрон 2 захватывает заготовку 18, а после съема ее со столика 33 происходит подъем нижнего патрона 3 и захват им нижнего конца заготовки 18, Далее на роторе 1 выполняются следующие операции.
Использование изобретения позволит автоматизировать трудоемкие операции снаряжения в массовом производстве индикаторных трубок.
Форму.л а изобретения
Устройство для обработки стеклянных трубок, содержащее стеклообраба- тывающий ротор с верхними и нижними патронами, его привод, по крайней мере один дополнительный ротор, смонтированный около стеклообрабатьгоаю- щего ротора с возможностью поворота от храпового механизма, а также перетапкиватели трубок, отличающееся тем, что, с целью упрощения конструкции, оно снабжено элементами j поддерживающими трубки при .переходе их из ротора в ротор, вьшол- ненными в виде столиков и закрепленных на стеклообрабатывающем роторе ограничителей, имеющих с одной стороны соосные с патронами гнезда для трубок, с другой - выступы, контакти- рующке с трубками при переходе их .
из дополнительного ротора в стекло- обрабатывающий ротор, при этом привод храпового механизма выполнен в виде рычага с двумя роликами, один из которых взаимодействует с водилом храпового механизма, а другой - с патронами стеклообрабатывающего ротора, а переталкиватели трубок выполнены в виде подпружиненных рьпагов со скосами со стороны подхода трубок.
33 2
zszt
Л
18
Редактор Н.Гулько
Составитель Л.Голубева Техред М.Дидык
Заказ 4015/21
Тираж 427Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, , Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, , Проектная, 4
Корректор Л.Бескид

| название | год | авторы | номер документа |
|---|---|---|---|
| Автоматическая роторная линия снаряжения индикаторных трубок | 1977 |
|
SU659354A1 |
| АВТОМАТИЧЕСКАЯ ЛИНИЯ ДЛЯ СОРТИРОВКИ | 1967 |
|
SU191752A1 |
| Автомат снаряжения индикаторных трубок | 1980 |
|
SU901012A1 |
| Автомат снаряжения индикаторных трубок | 1983 |
|
SU1168375A1 |
| Автомат для упаковки индикаторных трубок в кассеты и механизм заталкивания индикаторных трубок в кассеты | 1984 |
|
SU1268473A1 |
| Транспортно-технологический ротор | 1988 |
|
SU1586795A1 |
| Автомат снаряжения индикаторных трубок | 1988 |
|
SU1520023A1 |
| Устройство для подачи и удаления изделий из рабочей зоны пресса | 1990 |
|
SU1787058A3 |
| Загрузочное устройство | 1978 |
|
SU749626A1 |
| Плоскопрокатное устройство для поперечно-клиновой прокатки | 1988 |
|
SU1569066A1 |
Изобретение относится к тепловой обработке стеклянных трубок и может быть использовано в химической, медицинской и горно-добывающей промьш- ленности. Цель изобретения - ynpotne- ние конструкции автомата. Автомат содержит стеклообрабатывающий ротор с верхними 2 и нижними 3 патронами н (/) : DO СП ел ZfS Фаг. /
| Патент США № 4330317, кл | |||
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
| Способ получения фтористых солей | 1914 |
|
SU1980A1 |
| АВТОМАТИЧЕСКАЯ ЛИНИЯ ДЛЯ СОРТИРОВКИ | 0 |
|
SU191752A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
