(Л
i(i .
4
О СО
со
| название | год | авторы | номер документа |
|---|---|---|---|
| Загрузочное устройство для автоматических листообрабатывающих комплексов | 1985 |
|
SU1337175A1 |
| Автоматизированный комплекс для штамповки | 1985 |
|
SU1291253A1 |
| Устройство для стапелированияшТучНыХ зАгОТОВОК | 1979 |
|
SU804124A1 |
| Устройство для поштучной выдачи заготовок | 1987 |
|
SU1456271A1 |
| Магазинное устройство робототехнологического комплекса | 1987 |
|
SU1542669A1 |
| УСТРОЙСТВО ДЛЯ СТАПЕЛИРОВАНИЯ ШТУЧНЫХ ЗАГОТОВОК | 1972 |
|
SU335031A1 |
| Устройство для поштучной выдачи заготовок | 1986 |
|
SU1324728A1 |
| Устройство для групповой сборки легкодеформируемых деталей | 1985 |
|
SU1255355A1 |
| Автоматизированный комплекс для многономенклатурной штамповки деталей из штучных заготовок | 1986 |
|
SU1637909A1 |
| Автоматизированный комплекс для многономенклатурной штамповки деталей из штучных заготовок | 1986 |
|
SU1532149A1 |
Изобретение относится к обработке давлением, а именно к области листоштамповочного производства, и может быть использовано при автоматизации стапелирования штучных заготовок. Целью изобретения является по- вьппенне надежности за счет повьппения , динамических характеристик. Для достижения цели заготовки, подаваемые в кассету на опору 18, своим весом опускают последнюю. DJTOK 16 выталкивает ролик 15 из гнезда диска 7.Диск под действием груза 12 поворачивается, а ролик 15, перекатываясь по диску 7, попадает в следукяцее гнездо под действием груза 14. Ролик 15 взаимодействует t косынкой 19 и поднимает косынку, шток 16 и опору в исходное положение. 4 ил.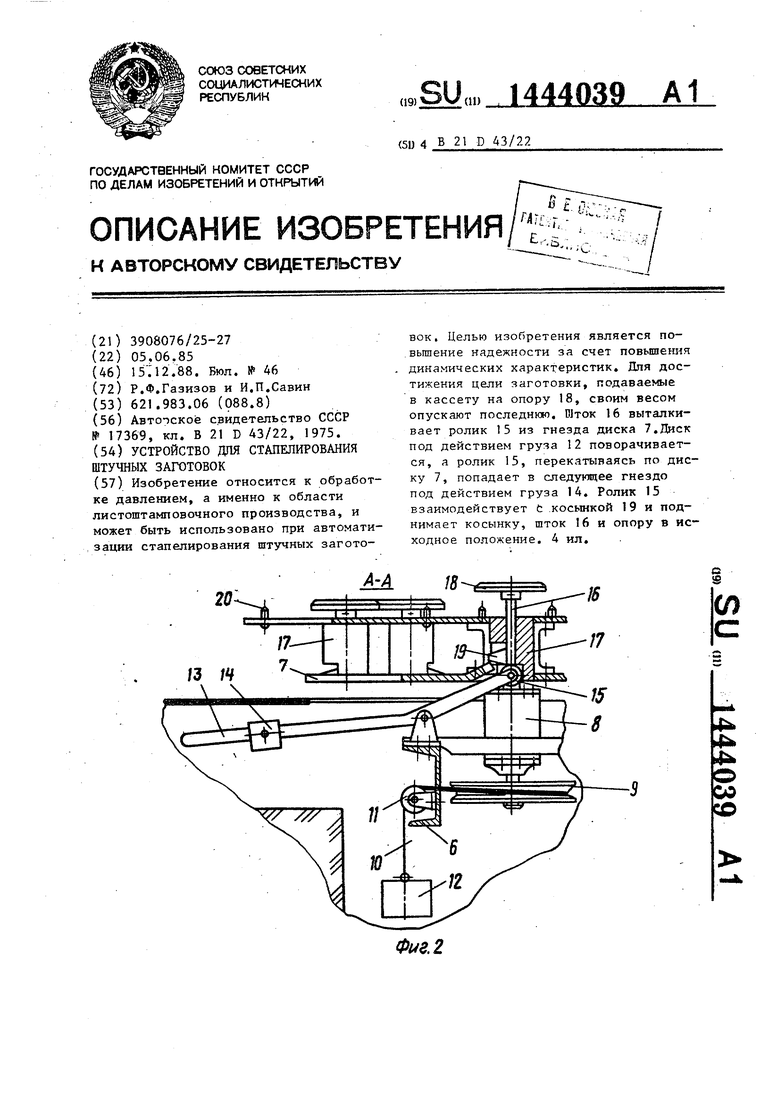
Фиг. 2
Изобретение относится к листоштам- повочному производству, и может быть использовано при автоматизации штуч- ньпс заготовок.
Цель изобретения - повьшение надежности.
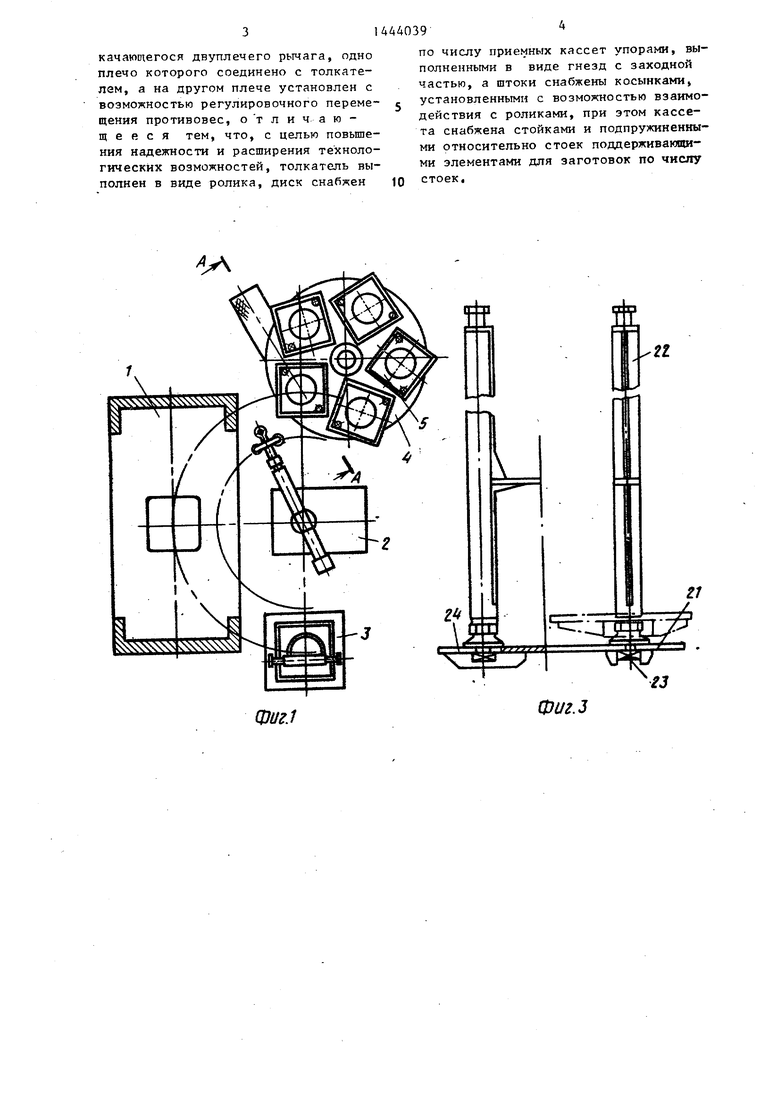
На фиг,1 показан автоматизированный комплекс (в который включено устройство для стапелирования); на г, 2 - разрез А-А на фиг.1; на фиг. 3 - кассета, общий вид;нафиг,4- стойка кассеты, разрез.
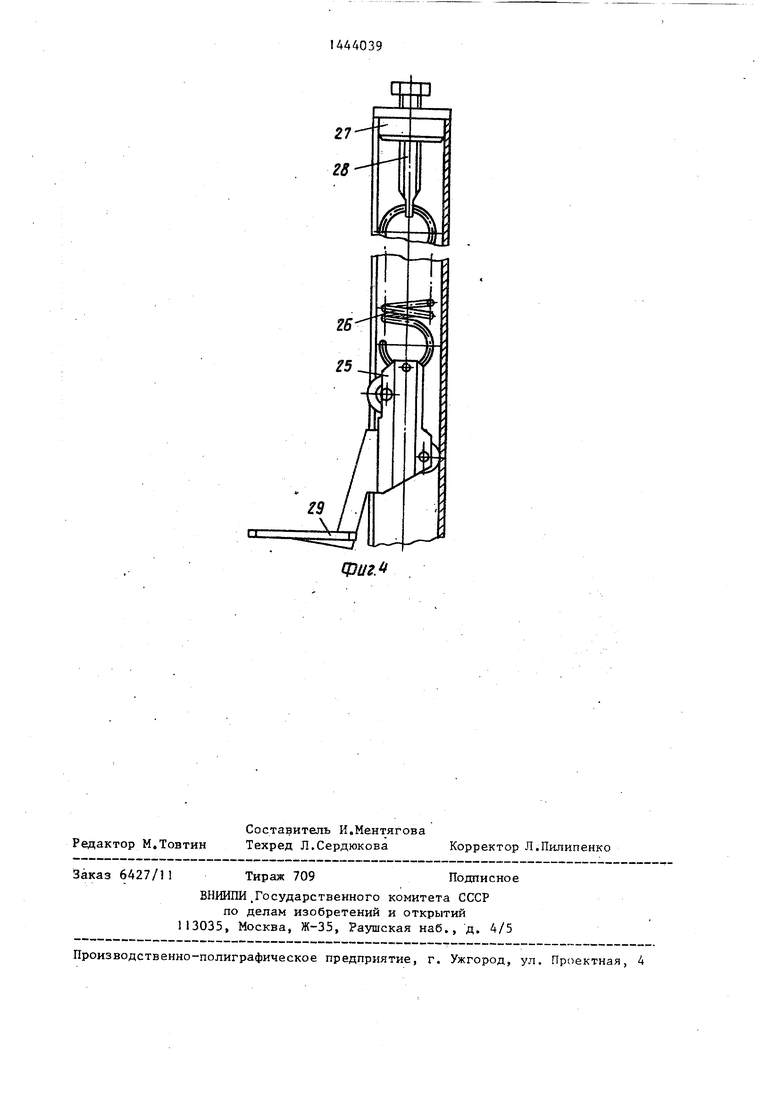
Автоматизированный комплекс содержит пресс 1, робот 2, загрузочное устройство 3 и устройство 4 для пелирования с кассетами 5. Устройство 4 для стапелирования состоит из Ьснования 6, диска 7, ротора 7, закрепленного на основании 6 пос- редством подпшпника 8; бараба- на 9, закрепленного на конце вала диска 7. Трос 10, перекинут через блок 11, один конец которого закреплен на барабане 9, на дру- гом конце подвешен груз 12, двуплечий рычаг 13, закрепленный на основании 6, на одном плече рычага монтирован груз 14 с возможностью передвижения его и фиксации, а на конце ДРУ гого плеча закреплен ролик 15. Штоки 16, установлеШ) с возможностью осевого перемещения в подшипник-ах 17. На верхнем конце, штоков закреплены опоры 18, а к нижнему концу прикрепле- ны косынки 19, которые размещаются в прорезях подшипников 17. Штыри 20 предназначены для установки кассет для заготовок. Кассета.(фиг,3,4) состоит из основания 21, на котором закреплены стойки 22 трубчатой конструкции при помощи болтов 23 с возможностью перемещения стоек в пазе 24. Каретки 25 установлейы совместно с пружинами 26 изнутри стоек 22. Пру- жины 26 соединены со стойками при помощи гаек-крышек 27 и регулирующих болтов 28. Каждая стойка кассеты снабжена опорными элементами для заготовок в виде лапок 29, прикреплен- ных к кареткам 25. Лапки перемещаются в пазах, вьшолнегап 1х в стойках 22 , Устройство работает следуклцим образом.
Промьш1ленный робот 2 своим-зах- , ватным органом доставляет из рабочей зоны пресса 1 отштампованную деталь и останавливается над установленной
0 5 0 Q 5 «
5
на штырях 20 кассетой, затем деталь опускается в кассету (фиг.З), Деталь падает и ложится на лапки 29. По мере возрастания стопы отштампованных деталей лапки 20 опускаются вместе с каретками 25, подвешенными на пружинах 26. Таким образом высота падения деталей поддерживается примерно одинаковой. Когда лапки 29 опустятся в свое нижнее положение стопа деталей будет давить на опоры 18 и шток 16. При достижении определенного веса, заранее установленного регулированием силы поджима посредством груза 14 на рычаге 13, шток 16 выталкивает ролик 15 из гнезда и, лишенный упора, диск 7, под действием груза 12 проворачивается до тех пор,пока находяршйся по нижней плоскости диска 7, ролик 15 не попадет в сле- дунлдее гнездо. При закатывании ролик поднимает косынку 19, прикрепленнзпо к штоку 16, при этом шток 16, находившийся в нижнем положении, поднимается, а ролик 15, упираясь в вертикальную базирующую стенку гнезда фиксирует диск 7. Очередная кассета устанавливается для приема заготовок. После заполнения всех кассет они снимаются, а вместо них устанавливаются пустые, диск 7 приводится в исходное положение проворотом в обратную сторону, груз 12 при этом занима ет свое верхнее положение. Устройство готово к следующему циклу. При изменении номенклатуры обрабатываемых деталей предварительно регулируется сила поджима изменением места груза 14 на плече рычага 13 и переставляются стойки 22 кассеты.
Изобретение .позволяет повысить динамические характеристики устройства.
Формула изобретения
Устройство для стапелирования штучных заготовок, содержащее размещенные на основании периодически вращающийся в горизонтальной плоскости от индивидуального привода диск,несущий приемные кассеты с расположенными внутри них подвижными в вертикальном направлении опорами со гатоками, и узел контроля высоты пакета заготовок, включающий стержень, имеющий средство поджима к опоре в виде шар- нирно установленного на основании
качаю01егося двуплечего рычага, одно плечо которого соединено с толкателем, а на другом плече установлен с возможностью регулировочного перемещения противовес, обличающееся тем, что, с целью повышения надежности и расширения технологических возможностей, толкатель выполнен в виде ролика, диск снабжен
V
Фиг.1
по числу приемных кассет упорами, выполненными в виде гнезд с заходной частью, а штоки снабжены косынками, установленными с возможностью взаимодействия с роликами, при этом кассета снабжена стойками и подпружиненными относительно стоек поддерживающими злементами для заготовок по числу стоек.
2t
Z1
::g5K
TJ
23
Фиг.з
Фиг,
| Подвижной контакт к контактной доске для механической подачи сигналов по азбуке Морзе | 1929 |
|
SU17369A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
