Изобретение относится к обработке метахтов давлением и может быть использовано при автоматизации штаьшо- вочного производства в различных отраслях машиностроения.
Цель изобретения - упрощение конструкции комплекса. . На фиг. 1 показан комплекс,, вид сверху; на фиг.2 - то же, вид сбоку.
Автоматизированный комплекс для штамповки содержит пресс 1, на столе которого установлен штамп 2, загрузочное устройство 3. У перецней кромки штамповочной плиты пресса 1 расположен примьшшеннын робот 4„ Механизм для перемещения промышленного робота вдоль рабочей зоны пресса состоит из двух боковых параллельных звеньев 5 и 6, которые крепятся к прессу 1 с помощью шарниров 7 и 8 и между собой связующим звеном 9. Боковые звенья 5 и 6 поворачиваются вправо-влев приводом 10. На связующем звене 9
30
35
расположены узлы 11 вертикального пе- 25 хороший доступ к штампу, что упроща- ремещения рук и узлы 12 перемещения рук перпендикулярно передней кромке подштамповой плиты. Звено 9 выполнено разъемным. Составные части связаны между собой быстродействующим зажимом 13. Автоматизированный кош:- лекс снабжен единой системой управления (не показана), содержащей датчики положения рабочих органов и датчики, наличия заготовок и деталей в штампе и схватах промышленного робота.
Автоматизированный комплекс для штамповки работает следуюащм образом.
Включается привод 10 поворота. Зве-дд нья 5, 6 и 9 поворачиваются в крайнее левое положение. Руки промышленного робота выдвигаются вперед, причем одна располагается над загрузочным устройством 3, другая - над штампом. g Включается привод 11 вертикального пе- ремещения, руки опускаются и берут: левая - заготовку, правая - готовую деталь в штампе. После этого руки
ет его смену и наладку. Формула изобретения
Автоматизированный комплекс для штa ffloвки, содержаш;нй пресс с рабочей зоной, загрузочное и приемное устройства, двурукий промышленный робот с приводны ш мexaнизмa и подъема рук и их возвратно-поступательного перемещения вдоль рабочей зоны пресса и по направлению к рабочей зоне пресса, отличающийся тем, что, с цепью упрощения конструк- 1ЩИ промышленного робота, механизм возвратно-поступательного перемещения рук робота вдоль рабочей зоны пресса выполнен в виде трехзвенного шарнирно рычажного механизма, имеющего два боковых и одно связующее звенья, каждое боковое звено одним концом шарнирно установлено на прессе, а другим шарнирно связано со связующим звеном, при этом связующее звено выполнено
поднимаются и втягиваются в исходное ,-.-. разъемным, а механизмы подъема рук состояние. Включается привод 10 пово- робота и перемещения последних по рота. Звенья 5 и 6, связанные звеномнаправлению к рабочей зоне пресса ус9, поворачиваются в крайнее правое положение. Вновь выдвигаются вперед
тановлеиы на связующем звене трехзвен ного шарнирно-рычажного механизма.
руки, причем одна с заготовкой располагается над штампом, а другая - над тарой (накопителем, передающим
устройством и т.д.). Включается привод 11 вертикального перемещения. Ру-. ки опускаются. Заготовка укладывается в штамп, а готовая деталь - в тару. Руки возвращаются в исходное
положение. Происходит включение рабочего хода пресса 1 и в штампе 2 производится штамповка, после чего цикл повторяется.
При смене штампов комплекс останавливают и разъединяют звено 9, рас- фиксировав зажим 13, после чего разводят в разные стороны звенья 5 и 6 вместе с узлами перемещения рук перпендикулярно передней кромке подштамповой плиты и y3naNm вертикального перемещения рук.
Изобретение позволяет упростить конструкцию робота. Выполнение связующего звена разъемным обеспечивает
хороший доступ к штампу, что упроща-
ет его смену и наладку. Формула изобретения
Автоматизированный комплекс для штa ffloвки, содержаш;нй пресс с рабочей зоной, загрузочное и приемное устройства, двурукий промышленный робот с приводны ш мexaнизмa и подъема рук и их возвратно-поступательного перемещения вдоль рабочей зоны пресса и по направлению к рабочей зоне пресса, отличающийся тем, что, с цепью упрощения конструк- 1ЩИ промышленного робота, механизм возвратно-поступательного перемещения рук робота вдоль рабочей зоны пресса выполнен в виде трехзвенного шарнирно- рычажного механизма, имеющего два боковых и одно связующее звенья, каждое боковое звено одним концом шарнирно установлено на прессе, а другим шарнирно связано со связующим звеном, при этом связующее звено выполнено
тановлеиы на связующем звене трехзвенного шарнирно-рычажного механизма.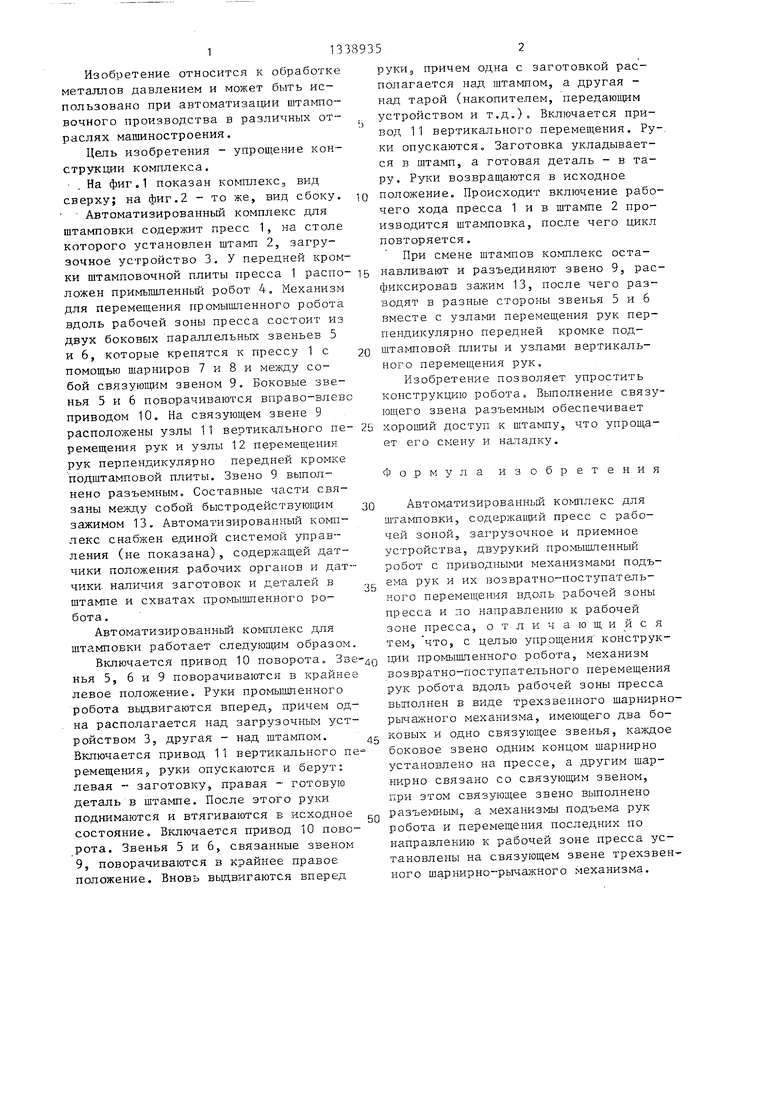
| название | год | авторы | номер документа |
|---|---|---|---|
| Автоматизированная линия штамповки деталей | 1986 |
|
SU1389914A1 |
| Автоматизированный комплекс для штамповки | 1981 |
|
SU997924A1 |
| РОБОТИЗИРОВАННЫЙ КОМПЛЕКС ДЛЯ МНОГОПЕРЕХОДНОЙ ШТАМПОВКИ | 1993 |
|
RU2082527C1 |
| Автоматизированный комплекс для многопереходной штамповки | 1982 |
|
SU1163942A1 |
| Автоматизированный комплекс для многономенклатурной штамповки деталей из штучных заготовок | 1986 |
|
SU1532149A1 |
| Автоматизированный комплекс для штамповки | 1986 |
|
SU1530305A1 |
| Автоматизированный комплекс для штамповки деталей из штучных заготовок | 1985 |
|
SU1238867A1 |
| Технологический комплекс сборки пакета магнитопровода электрической машины | 1990 |
|
SU1819366A3 |
| Роботизированный технологический комплекс для горячей штамповки | 1987 |
|
SU1581455A1 |
| Автоматизированный комплекс для многопереходной штамповки | 1983 |
|
SU1207576A1 |
Изобретение относится к обработке металлов давлением и может быть использовано при автоматизации штамповочного производства в различных областях мапшностроения. Целью изобретения является упрощение конструкции комплекса. Автоматизированный комплекс для штамповки содержит пресс 1, штамп 2, загрузочное устройство 3, промышленный робот 4. Механизм перемещения робота состоит из двух параллельных звеньев 5, 6, прикрепленных к прессу 1 шарнирами 7, 8 и скрепленных мезкду собой звеном 9. Звенья 5, 6 поворачиваются вправо-влево приводом. На звене 9 расположены приводы вертикального перемещения рук перпендикулярно передней кромке штампа. Звено 9 выполнено разъемным. Составные части связаны зажимом 13. Выполнение механизма перемещения составным улучшает доступ к штампу, что упрощает его смену и наладку, 2 ил. с (С ел с со со 00 ;о со ел Фиг.
| Автоматизированный комплекс для штамповки листовых заготовок | 1982 |
|
SU1061896A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
