готавливаемых про водов. Провод с блока размотки 50 протягивают через фильеру 41 и закрепляют на выступе элемента 6. От электродвигателя 29 через редуктор 27 вращение передается кулачку 26 и звездочке 30, От кулачка 26 через цевки 25 и диск 24 получает прерывистое вращение ось 2 с дисками 3 и 5, От звездочки 30 кру момент через цепь 31 и звездочку 32 передается валу 33, вращающему кулачки команодоаппарата 35 и звездочку 34. Звездочка ЗА приводит в движение цепь 36 с водилом 38„ Водило 38, огибая звездочки 34 и. 37, приводит в возвратно-поступа.1
Изобретение относится к технологическому оборудованию для подготовки электрических проводов к монтажу и . может быть использовано в электротехнической и других отраслях промьиилен- ности„
Цель изобретения - упрощение конструкции.
I. , .
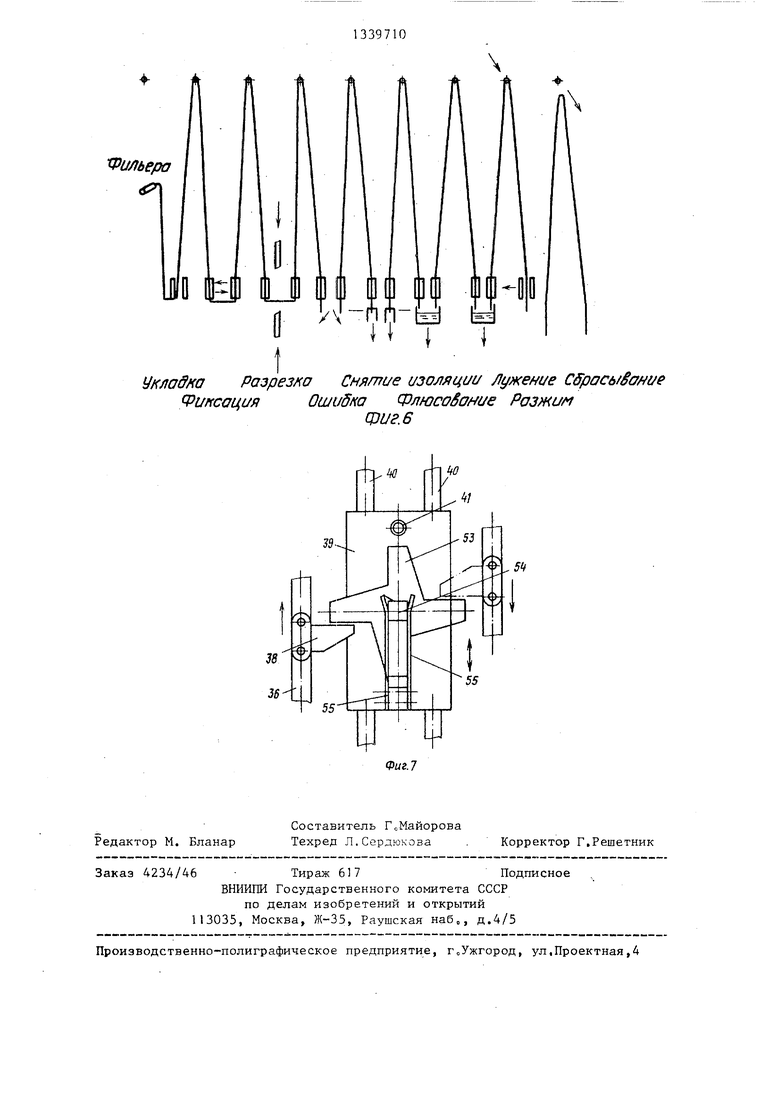
На фиг„1 изображена кинематическая схема автомата; на фиг,,,2 - механизм для зажима провода; на фиг.З - вид А На фиГо2; на фиГо4 - элемент для удержания провода и механизм для сбрасывания обработанного провода,; на фиг„5 - вид Б на фиг.4; на - схема обработки провода; на -- механизм для раскладки провода на устройстве для транспортирования.
На. столе 1 установлена вертикальная ось 2, на которой неподвижно закреплен нижний диск 3 с механизмами 4, Для зажима провода, расположенными равномерно по его периметру, и уста- новлен с помощью шлицевого соединения с возможностью перемещению вдоль нее верхний диск 5. На последнем установлены элементы 6 для удержания провода расположенные по его периметру и со- осно механизмам 4 диска 3с,
Каждый механизм 4 (фиги2 и З) состоит из корпуса- 7 с двумя неподвижными губками 8, на котором закреплен
тельное движение по направляющему элементу 40 ползун 39 с фильерой 41 о В процессе поворота диска 3 механизмы 4 попадают в зону расположения копира 52о Ролики механизма 4, взаимодействуя с копирам, раскрывают губки для прохода фильеры 41, в этот момент происходит сбрасывание провода в тару с элемента f При дальнейшем повороте дисков 3 и 5 провод попадает в узел обрезки, где отрезается в середине между механизмами 4,, Затем горизонтальные участки провода отгибаются вниз, и провод перемещают в узлы снятия изоляции, флюсования и лужения о 7 ил„
направляющий элемент 9 с подпружиненным штоком 10. На одном конце шток а 10 на оси 11, установлен ролик 12, на втором закреплен клин 13, На осях 14, закрепленных в корпусе 7, установлены два двуплечих поворотных рычага, на одних плечах которых расположены подвижные губки 15, а другие плечи подпружинены к губкам 15 пружиной 16 и установлены с возможностью взаимодействия с клином„ На рычагах выполнены скосы со стороны оси механизма 4 и расположены они по обе стороны
от ОСИо
На клине 13 и направляющем элементе 9 установлена пружина 17, предназначенная для удерживания клина 13 в исходном положении.
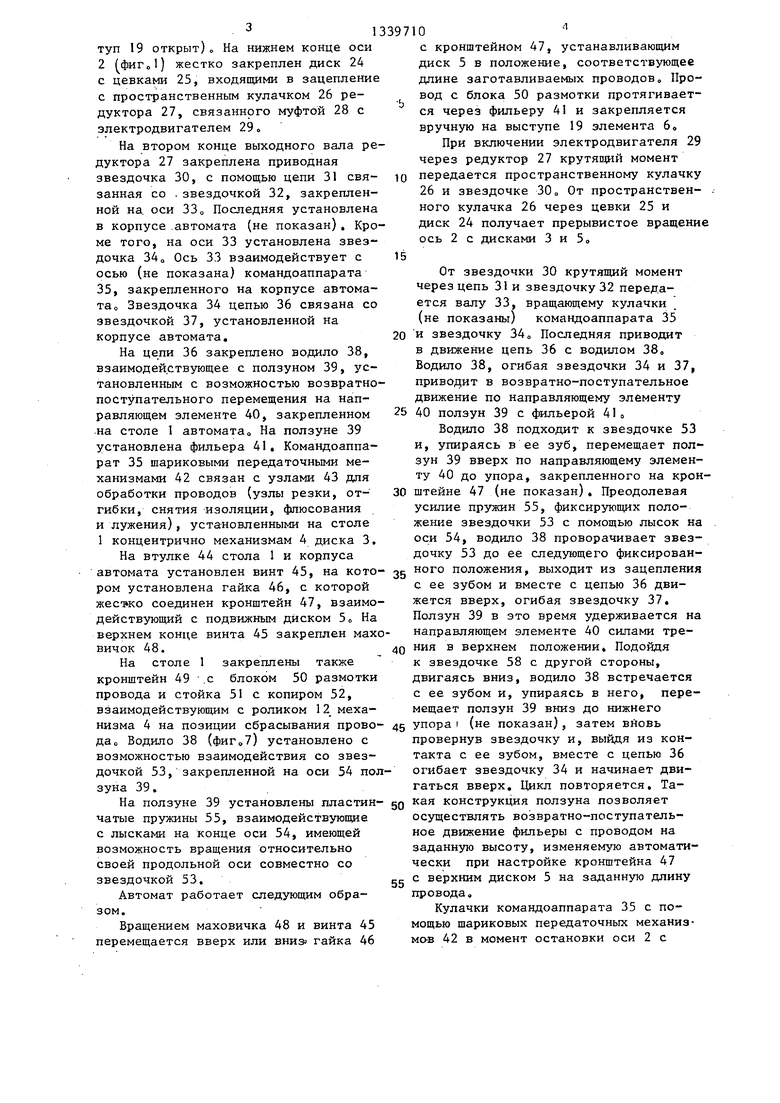
Элемент 6 для удержания провода выполнен в виде кронштейна 18 с выступом 19 о В кронштейне 18 на оси 20 установлен механизм для сбрасывания обработанного провода в тару выполненный в виде двуплечего поворотного рычага 21, снабженного упорной площадкой 22 и имеющего скощенную переднюю поверхность для укладки провода на выступ 19 о
На кронштейне 18 установлена пружина 23 сжатия, второй конец которой закреплен на площадке 22„ Пружина 23 предназначена для удерживания рычага 21 в исходном ноложении (выетуп 19 открыт). На нижнем конце оси 2 (фиг„1) жестко закреплен диск 24 с цевками 25, входящими в зацепление с пространственным кулачком 26 редуктора 27, связанного муфтой 28 с электродвигателем 29.
На втором конце выходного вала редуктора 27 закреплена приводная звездочка 30, с помощью цепи 31 связанная со . звездочкой 32, закрепленной на. оси 33о Последняя установлена в корпусе .автомата (не показан), Кроме того, на оси 33 установлена звездочка 34 а Ось 33 взаимодействует с осью (не показана) командоаппарата 35, закрепленного на корпусе автомата о Звездочка 34 цепью 36 связана со звездочкой 37, установленной на корпусе автомата.
На цепи 36 закреплено водило 38, взаимодей.ствующее с ползуном 39, установленным с возможностью возвратно- поступательного перемещения на направляющем элементе 40, закрепленном на столе 1 автомата На ползуне 39 установлена фильера 41, Командоаппа- рат 35 шариковыми передаточными механизмами 42 связан с узлами 43 для обработки проводов (узлы резки, отгибки, снятия изоляции, флюсования и лужения)I установленными на столе 1 концентрично механизмам 4 диска 3,
На втулке 44 стола 1 и корпуса
ь
10
с кронштейном 47, устанавливающим диск 5 в положение, соответствующее длине заготавливаемых проводов. Провод с блока 50 размотки протягивается через фильеру 41 и закрепляется вручную на выступе 19 элемента 6
При включении электродвигателя 29 через редуктор 27 крутящий момент передается пространственному кулачку 26 и звездочке 30„ От пространствен- ного кулачка 26 через цевки 25 и диск 24 получает прерывистое вращение ось 2 с дисками 3 и 5
15
От звездочки 30 крутящий момент через цепь 31 и звездочку 32 передается валу 33, вращающему кулачки (не показаны) командоаппарата 35
20 и звездочку 34 Последняя приводит в движение цепь 36 с водилом 38. Водило 38, огибая звездочки 34 и 37, приводит в возвратно-поступательное движение по направляющему элементу
25 40 ползун 39 с фильерой 41 о
Водило 38 подходит к звездочке 53 и, упираясь в ее зуб, перемещает ползун 39 вверх по направляющему элементу 40 до упора, закрепленного на крон30 штейне 47 (не показан), Преодолевая усилие пружин 55, фиксирующих положение звездочки 53 с помощью лысок на оси 54, водило 38 проворачивает звездочку 53 до ее следующего фиксирован- автомата установлен винт 45, на кото- 35 положения, выходит из зацепления ром установлена гайка 46, с которой с ее зубом и вместе с цепью 36 дви- жесэко соединен кронштейн 47, взаимо- жется вверх, огибая звездочку 37. действующий с подвижным диском 5 о На Ползун 39 в это время удерживается на верхнем конце винта 45 закреплен махо- направляющем элементе 40 силами тре- вичок 48.40 верхнем положении. Подойдя
На столе 1 закреплены также к звездочке 58 с другой стороны, кронштейн 49 .с блоком 50 размотки двигаясь вниз, водило 38 встречается
с ее зубом и, упираясь в него, перемещает ползун 39 вниз до нижнего
низма 4 на позиции сбрасывания прово- 45 Упора i (не показан), затем вновь дао Водило 38 (фиг) установлено с провернув звездочку и, выйдя из кон- возможностью взаимодействия со звез- такта с ее зубом, вместе с цепью 36 дочкой 53, закрепленной на оси 54 пол- огибает звездочку 34 и начинает дви- зуна 39,гаться вверх. Цикл повторяется, ТаНа ползуне 39 установлены пластин- 50 конструкция ползуна позволяет
провода и стойка 51 с копиром 52, взаимодействующим с роликом 12 мехачатые пружины 55, взаимодействующие с лысками на конце оси 54, имеющей возможность вращения относительно своей продольной оси совместно со звездочкой 53,
Автомат работает следующим образом.
Вращением маховичка 48 и винта 45 перемещается вверх или вниз гайка 46
55
осуществлять возвратно-поступательное движение фильеры с проводом на заданную высоту, изменяемую автоматически при настройке кронштейна 47 с верхним диском 5 на заданную длину провода.
Кулачки командоаппарата 35 с помощью шариковых передаточных механиз- мо-в 42 в момент остановки оси 2 с
с кронштейном 47, устанавливающим диск 5 в положение, соответствующее длине заготавливаемых проводов. Провод с блока 50 размотки протягивается через фильеру 41 и закрепляется вручную на выступе 19 элемента 6
При включении электродвигателя 29 через редуктор 27 крутящий момент передается пространственному кулачку 26 и звездочке 30„ От пространствен- . ного кулачка 26 через цевки 25 и диск 24 получает прерывистое вращение ось 2 с дисками 3 и 5
15
От звездочки 30 крутящий момент через цепь 31 и звездочку 32 передается валу 33, вращающему кулачки (не показаны) командоаппарата 35
и звездочку 34 Последняя приводит в движение цепь 36 с водилом 38. Водило 38, огибая звездочки 34 и 37, приводит в возвратно-поступательное движение по направляющему элементу
40 ползун 39 с фильерой 41 о
Водило 38 подходит к звездочке 53 и, упираясь в ее зуб, перемещает ползун 39 вверх по направляющему элементу 40 до упора, закрепленного на кронштейне 47 (не показан), Преодолевая усилие пружин 55, фиксирующих полоение звездочки 53 с помощью лысок на . си 54, водило 38 проворачивает звез5
осуществлять возвратно-поступательное движение фильеры с проводом на заданную высоту, изменяемую автоматически при настройке кронштейна 47 с верхним диском 5 на заданную длину провода.
Кулачки командоаппарата 35 с помощью шариковых передаточных механиз- мо-в 42 в момент остановки оси 2 с
13
дисками 3 и 5 приводят в движение рабочие органы узлов 43, обрабатывающих концы проводов о Когда в процессе поворота диска 3 механизмы 4 попадают в зону, где установлен копир 52, ролики 12 механизмов 4, взаимодействуя с копиром 52, преодолевают усилие пружины 16 и с помощью штока 10 и клина 13 воздействуют на губки 15, проворачивая их на осях 14,
Губки 15, преодолевая усилие пружины 16, отходят от губок 8 корпуса 7 механизма 4, создавая пространство для прохода фильеры 41с В этой же зоне площадка 22 рычага 21 каждого элемента 6 попадает на упор (не показан) , закрепленный на корпусе автомата, отжимается им вниз и, преодолевая усилие пружины 23, проворачи- вает рычаг 21 вокруг оси 20, сдвигая нижний конец рычага 21 на край выступа 19„
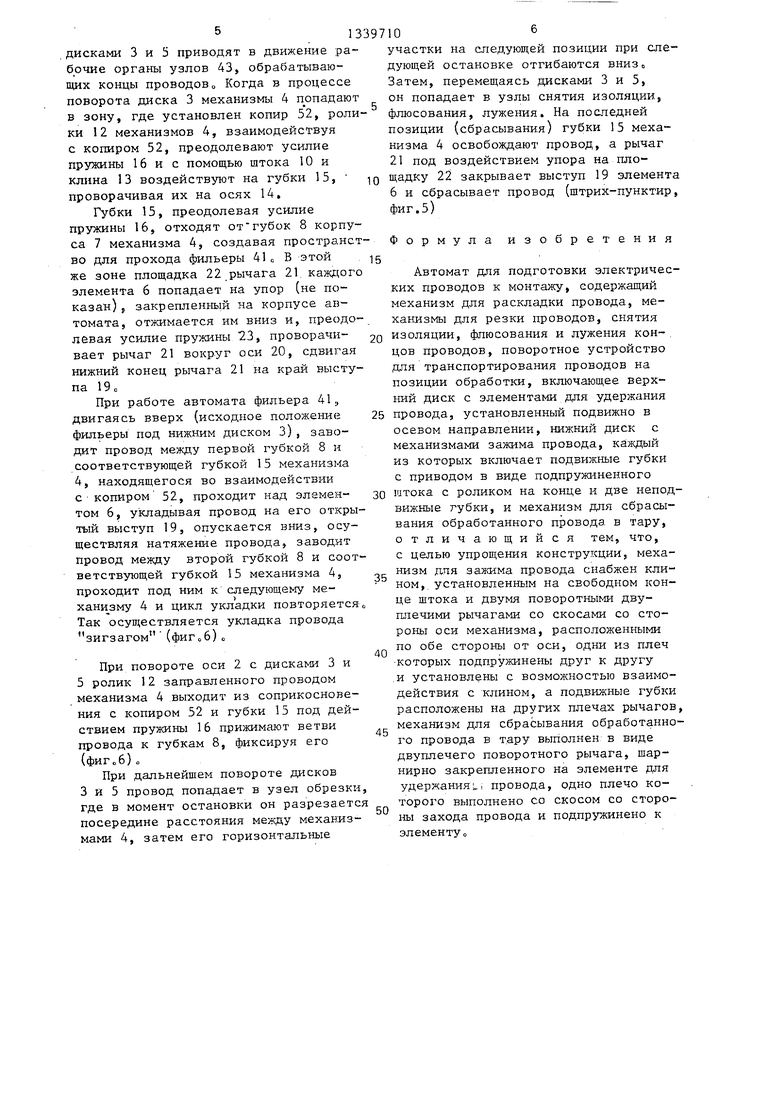
При работе автомата фильера 41., двигаясь вверх (исходное положение фильеры под нижним диском З), заводит провод между первой губкой 8 и соответствующей губкой 15 механизма 4, находящегося во взаимодействии с копиром 52, проходит над элемен- том 6, укладывая провод на его открытый выступ 19, опускается вниз, осуществляя натяжение провода заводит провод между второй губкой 8 и соответствующей губкой 15 механизма 4, проходит под ним к следующему механизму 4 и цикл укладки повторяется Так осуществляется укладка провода зигзагом (фиг о 6)с
При повороте оси 2 с дисками 3 и
5 ролик 12 заправленного проводом механизма 4 выходит из соприкосновения с копиром 52 и губки 15 под действием пружины 16 прижимают ветви провода к губкам 8, фиксируя его
(фиг об) о
При дальнейшем повороте дисков 3 и 5 провод попадает в узел обрезки, где в момент остановки он разрезается посередине расстояния между механизмами 4, затем его горизонтальные
5 о g
0
5
ОЬ
участки на следующей позиции при сле дующей остановке отгибаются внизо Затем, перемещаясь дисками 3 и 5, он попадает в узлы снятия изоляции, флюсования, лужения. На последней позиции (сбрасывания) губки 15 механизма 4 освобождают провод, а рычаг 21 под воздействием упора на площадку 22 закрывает выступ 19 элемента 6 и сбрасывает провод (щтрих-пунктир, фиг.5)
Формула изобретения
Автомат для подготовки электрических проводов к монтажу, содержащий механизм для раскладки провода, механизмы для резки проводов, снятия изоляции, флюсования и лужения концов проводов, поворотное устройство для транспортирования проводов на позиции обработки, включающее верхний диск с элементами для удержания провода, установленный подвижно в осевом направлении, нижний диск с механизмами зажима провода, калодый из которых включает подвижные губкй с приводом в виде подпружиненного штока с роликом на конце и две неподвижные губки, и механизм для сбрасывания обработанного провода в тару, отличающийся тем, что, с целью упрощения конструкции, механизм дпя зажима провода снабжен клином, установленным на свободном конце штока и двумя поворотными двуплечими рычагами со скосами со стороны оси механизма, расположенными по обе стороны от оси, одни из плеч которых подпружинены друг к другу .и установлены с возможностью взаимодействия с клином, а подвижные губки расположены на других плечах рычагов, механизм для сбрасывания обработанного провода в тару выполнен в виде двуплечего поворотного рычага, шар- нирно закрепленного на элементе для удержания;., провода, одно плечо которого выполнено со скосом со стороны захода провода и подпружинено к элементу
/V
/5 7 ЮЗ
11 12
Фиг.2 Вид А
У
/7
Фиг.З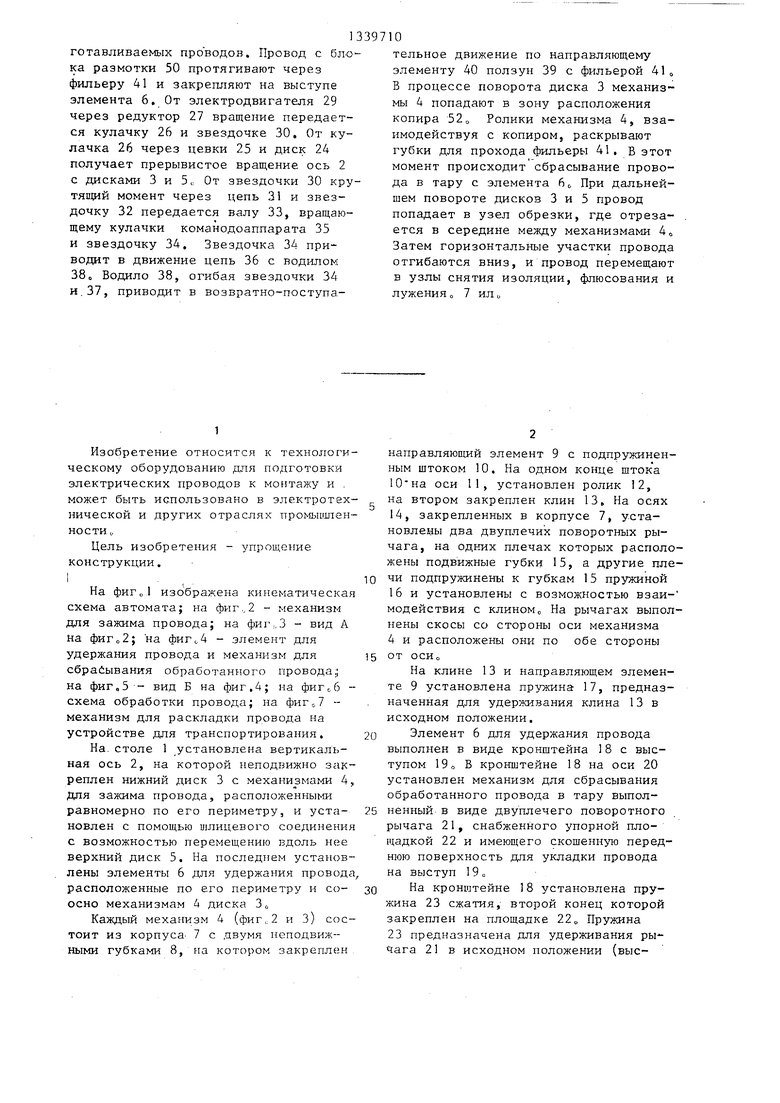
| название | год | авторы | номер документа |
|---|---|---|---|
| Автомат для подготовки электрическихпРОВОдОВ K МОНТАжу | 1978 |
|
SU845207A1 |
| Устройство для подготовки радиоэлементов с осевыми выводами к монтажу | 1986 |
|
SU1370805A2 |
| РОТАЦИОННО-ОБЖИМНОЙ АВТОМАТ НЕПРЕРЫВНОГО | 1966 |
|
SU179739A1 |
| ЙСЕСОЮЗНАЯ ^^^шт-1штт/^ | 1973 |
|
SU389592A1 |
| Автомат для подготовки проводов к монтажу | 1987 |
|
SU1457041A1 |
| Автомат для предмонтажной обработки проводов | 1983 |
|
SU1129681A1 |
| Полуавтомат для лужения деталей | 1984 |
|
SU1194617A1 |
| Устройство для мерной резки, зачистки и лужения монтажных проводов | 1971 |
|
SU437169A1 |
| Автомат для заготовки монтажных проводов | 1979 |
|
SU1008831A1 |
| Автомат для предмонтажной обработки электрических шнуров | 1988 |
|
SU1642542A1 |
Изобретение относится к технологическому оборудованию для подгот товки электрических проводов к монтажу и может быть использовано в электротехнической и других отраслях про- мьшшенностИо Цель изобретения - упрощение конструкции. Вращением маховичка 48 винта 45 перемещают диск 5 в положение, соответствующее длине заJ7 (Л X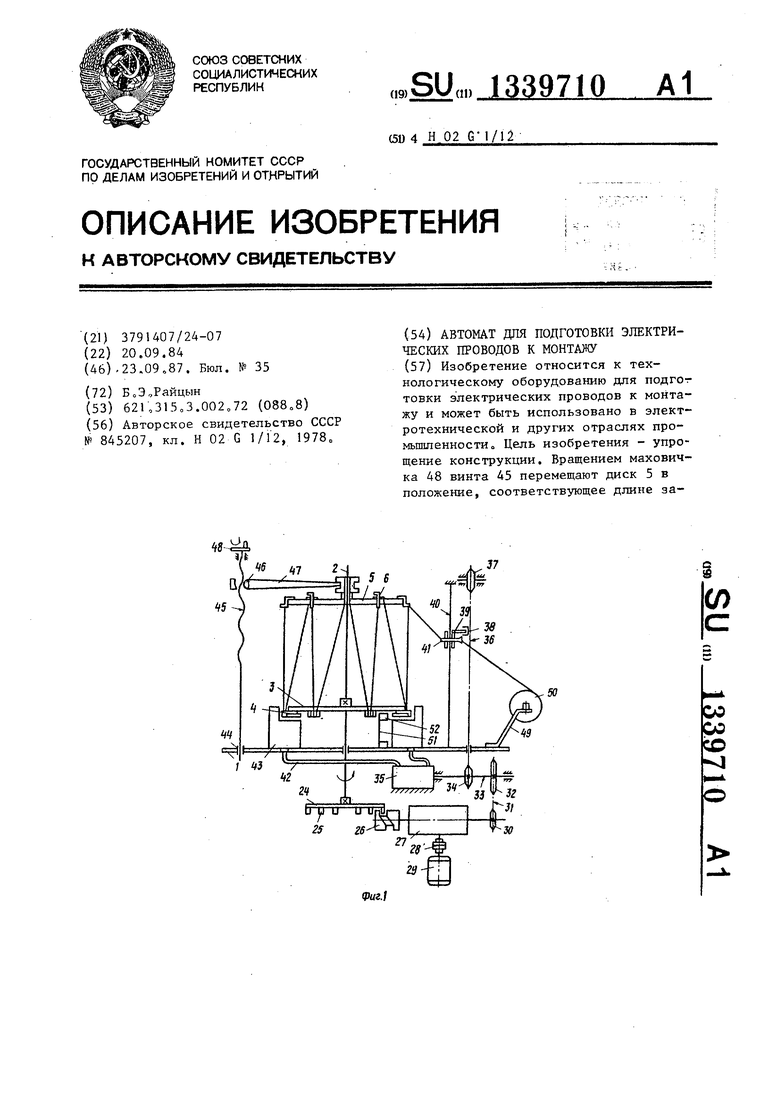
/
18
20
Видб
19
Фиг.
Фиг. 5
Укладма Разрез/ а Снятие изоляции Лужение С рось/ёоние Я ипсацая Ошибка Флюсобоние
ери г, 6
Редактор М. Бланар
Составитель ГоМайорова Техред Л.Сердюкова
Заказ 4234/46 Тираж 617Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб,, д.4/5
Производственно-полиграфическое предприятие, г Ужгород, ул.Проектная,4
Корректор Г,Решетник
| Автомат для подготовки электрическихпРОВОдОВ K МОНТАжу | 1978 |
|
SU845207A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
