Изобретение относится к транспортно- накопительным системам гибких производств в машиностроении, приборостроении и других отраслях промышленности и может быть использовано при транспортировании и накоплении деталей различной номенклатуры.
Цель изобретения - расширение технологических возможностей - обеспечивается возможностью транспортирования крупногабаритных деталей, не подлежаших установке в накопитель.
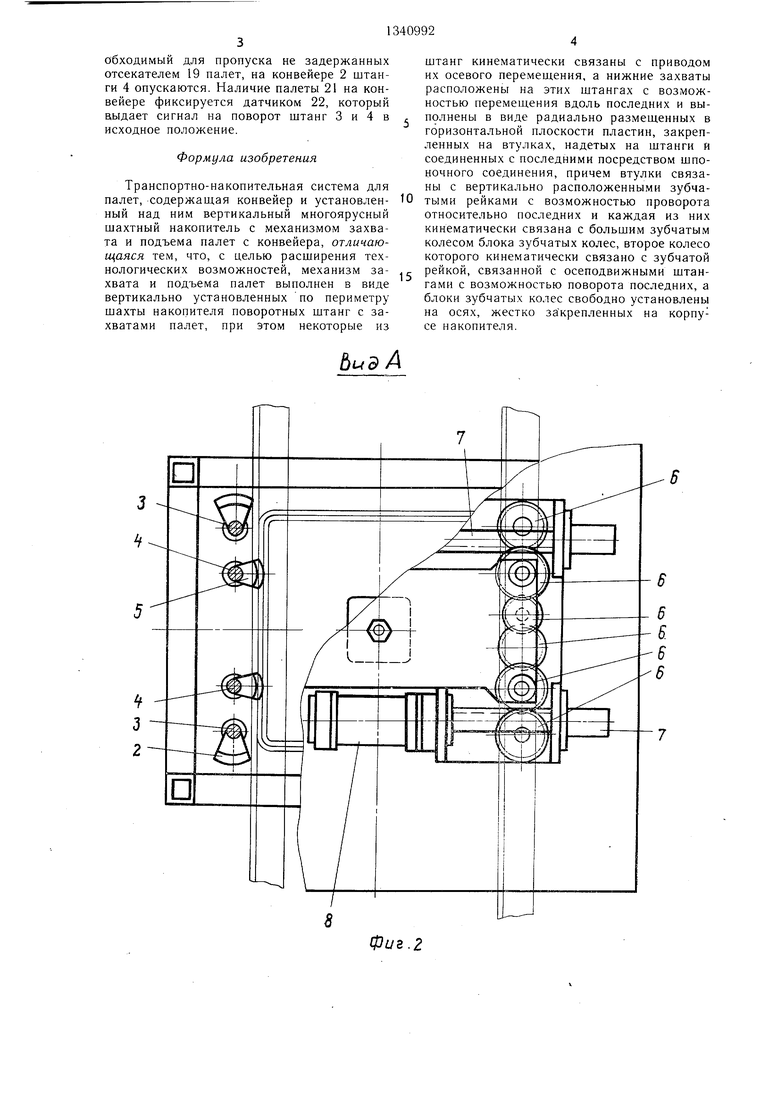
На фиг. 1 изображен накопитель, вид по оси конвейера; на фиг. 2 - вид А на фиг. 1 (крышка не показана); на фиг. 3 - вид Б на фиг. 1; на фиг. 4 - сечение В-В на фиг. 1; на фиг. 5 - дифференциальный зубчато-реечный механизм; на фиг. 6 - сечение Г-Г на фиг. 5.
Транспортно-накопительная система (ТНС) содержит накопитель с каркасом 1, смонтированным над ленточным конвейером 2, и механизмом захвата и подъема палет, включающим четыре крайних вертикально расположенных штанги 3 и четыре средних штанги 4. Штанги 3 и 4 снабжены захватами 5, выполненными в виде радиаль- но расположенных пластин, размешенных по длине штанг с определенным равным шагом. Штанги 3 и 4 смонтированы с возможностью поворота на угол 90° и соединены через систему зубчато-реечных передач б, 7 с приводом 8 в виде силового цилиндра. Штанги 4 дополнительно установлены с возможностью осевого перемеш.ения и соединены через траверсы 9 с приводом 10 перемешения в виде силового цилиндра. В нижней части на штангах 4 смонтированы механизмы увеличения длины хода нижних захватов 11, включающие подвижную относительно штанг 4 траверсу 12, соединенную через зубчатую рейку 13 с большим зубчатым колесом 14 блока шестерен, установленным с возможностью поворота на оси 15. Последняя закреплена на каркасе 1. Малое зубчатое колесо 16 блок-шестерни соединено через зубчатую реЙЕсу 17 со штангами 4. Траверса 12 служит опорным элементом для захватов 11, установленных на штангах 4 с возможностью продольного перемещения и зафиксированных от поворота шпонками. На ленточном конвейере 2 закреплены отсекатели 18 и 19, датчик 20 распознавания палет 21 и датчик 22 положения палет 21 на русле конвейера 2. На каркасе 1 смонтированы датчики 23 наличия палет в накопительных гнездах механизма подъема, т. е. на захватах 5.
Крайнее положение штоков силовых цилиндров 8 и 10 и работа отсекателей 18 и 19 контролируются датчиками (не показаны), выдающими сигналы на пульт 24 управления.
Втулки захватов 11 соединены с втулками 25 с помощью кольцевых буртов 26, обеспечивающих свободный поворот захватов 11 относительно втулок 25 и одновременно препятствующих их взаимному осевому перемещению.
Втулки 27 траверсы 28, к которой прикреплена рейка 17, зафиксированы на
штанге 4, например, с помощью стопорных колец 29, прикрепленных к штангам 4 болтами 30. Кольца 29 исключают перемещение втулок 27 по штангам 4 и не препятствуют повороту штанг 4 в отверстиях втулок 27.
ТНС работает следуюшим образом. При отсутствии на пульте 24 сигнала на накопление или выдачу палет 21 отсекатели 18 и 19 опущены и налеты 21 свободно идут по конвейеру 2.
г при работе ТНС в режиме накопления с пульта 24 поступает сигнал на накопление палет с деталями.
Датчик 20 распознавания пропускает все палеты, кроме нужного типа. При появлении таких палет датчик 20 выдает сигнал
0 на пульт 24 на срабатывание пневморас- пределителей. Отсекатель 18 задерживает налету нужного типа, а отсекатель 19 - все последующие. В момент подхода палеты в исходное положение датчик 22 выдает сигнал на пневмораспределитель, включается пнев5 моцилиндр 8, который через зубчато-реечную передачу 6, 7 поворачивает штанги 3 и 4 на угол 90°, при этом захваты 5 на штангах 4 устанавливаются в положение захвата палет, после чего срабатывает пнев- моцилиндр 10 и через траверсы 9 подни мает систему штанг 4 с палетами 21. Одновременно с помощью механизмов увеличения длины хода палета 21., находящаяся на конвейере 2, поднимается на высоту, большую длины перемещения штанг 4 (например, на удвоенную длину перемешения
штанг), увеличивая тем самым просвет над руслом конвейера 2, что позволяет, не останавливая конвейер, пропускать по нему палеты, не подлежаш.ие помешению в накопитель. Штанги 3 и 4 поворачиваются
0 в исходное положение, палета 21.1 устанавливается на захваты 5 штанг 3, а отсека - тели 18 и 19 отпускают палеты, находящиеся на конвейере. Датчик 23 определяет наличие палет в накопительном гнезде и при наличии палеты штанги 4 опускаются в
5 исходное положение. Последний датчик 23 выдает сигнал на пульт управления о том, что накопитель заполнен.
Работа накопителя в режиме выдачи палет осуществляется в обратном порядке. На пульт 24 поступает сигнал о выдаче
0 палет из накопителя. После прохождения палет любого типа или при отсутствий их в течение какого-то огфеделенного времени датчик 22 выдает сигнал на пульт управления, и отсекатель 19 задерживает палеты. После срабатывания отсекателя 19 штанги 4 поднимаются и все штанги 3 и 4 поворачиваются на угол 90, при этом нижняя палета 21 подхватывается захватами 11. Через определенный интервал времени, не5
обходимый для пропуска не задержанных отсекателем 19 палет, на конвейере 2 штанги 4 опускаются. Наличие палеты 21 на конвейере фиксируется датчиком 22, который выдает сигнал на поворот штанг 3 и 4 в исходное положение.
Формула изобретения
Транспортно-накопительная система для палет, содержаш,ая конвейер и установленный над ним вертикальный многоярусный шахтный накопитель с механизмом захвата и подъема палет с конвейера, отличающаяся тем, что, с целью расширения технологических возможностей, механизм захвата и подъема палет выполнен в виде вертикально установленных по периметру шахты накопителя поворотных штанг с захватами палет, при этом некоторые из
штанг кинематически связаны с приводом их осевого перемеш,ения, а нижние захваты расположены на этих штангах с возможностью перемеш.ения вдоль последних и выполнены в виде радиально размешенных в горизонтальной плоскости пластин, закрепленных на втулках, надетых на штанги и соединенных с последними посредством шпоночного соединения, причем втулки связаны с вертикально расположенными зубчатыми рейками с возможностью проворота относительно последних и каждая из них кинематически связана с большим зубчатым колесом блока зубчатых колес, второе колесо которого кинематически связано с зубчатой с рейкой, связанной с осеподвижными штангами с возможностью поворота последних, а блоки зубчатых колес свободно установлены на осях, жестко за крепленных на корпусе накопителя.
0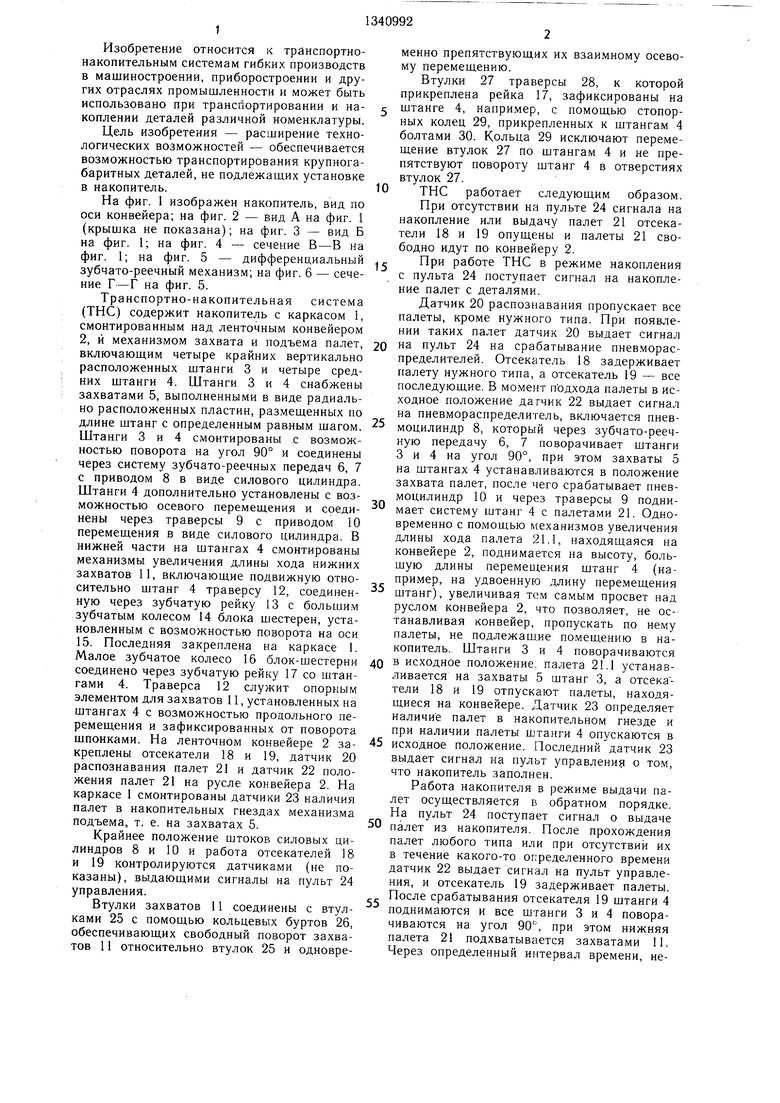
| название | год | авторы | номер документа |
|---|---|---|---|
| Автоматическая сборочная линия | 1985 |
|
SU1299772A1 |
| Устройство загрузки станка для зачистки отливок | 1990 |
|
SU1731408A1 |
| Установка для перегрузки штучных грузов | 1989 |
|
SU1775338A1 |
| Автоматическая линия для производства керамических изделий | 1986 |
|
SU1369898A1 |
| СПОСОБ ИЗГОТОВЛЕНИЯ ЗМЕЕВИКОВ СЛОЖНОЙ ФОРМЫ ИЗ ДЛИННОМЕРНЫХ ТРУБНЫХ ПЛЕТЕЙ И ТРУБОГИБОЧНАЯ УСТАНОВКА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1990 |
|
RU2038886C1 |
| ГИБКАЯ ПРОИЗВОДСТВЕННАЯ СИСТЕМА | 2012 |
|
RU2510320C2 |
| Транспортный робот с механизмом приема-выдачи палет | 1988 |
|
SU1683967A1 |
| Устройство для укладки в пакет чушек | 1984 |
|
SU1207948A1 |
| Автомат пакетной садки кирпича на печную вагонетку | 1980 |
|
SU944937A1 |
| Устройство смены палет в гибком производственном модуле | 1986 |
|
SU1425049A1 |
Изобретение относится к транспортно- накопительным системам гибких производств в машиностроении, приборостроении и др. отраслях промышленности и может быть использовано при транспортировании, и накоплении деталей различной номенклатуры. Цель изобретения - расширение технологических возможностей - обеспечивается возможностью транспортирования крупногабаритных деталей, не подлежащих установке в накопитель. Для этого смонтированный над ленточным конвейером 2 накопитель налет 21 с деталями имеет механизм захвата и подъема палет 21 с конвейера 2, включаюнлий вертикально расположенные поворотные подвижные и неподвижные штанги 4, 3 с захватами 5. В нижней части подвижных штанг 4 смонтирован механизм увеличения длины хода нижних захватов 11, обеспечиваюших захват палет 21 с конвейера 2. После прохождения налеты 21 и срабатывания отсекателя штанги 4 поднимаются и все штанги 3, 4 поворачиваются на угол 90°, при этом нижняя палета 21 подхватывается захватами 11. Далее после пропуска не задержанных отсекателем палет на конвейере 2 штанги 4 опускаются. 6 ил. S (Л -з 00 4 О СО со го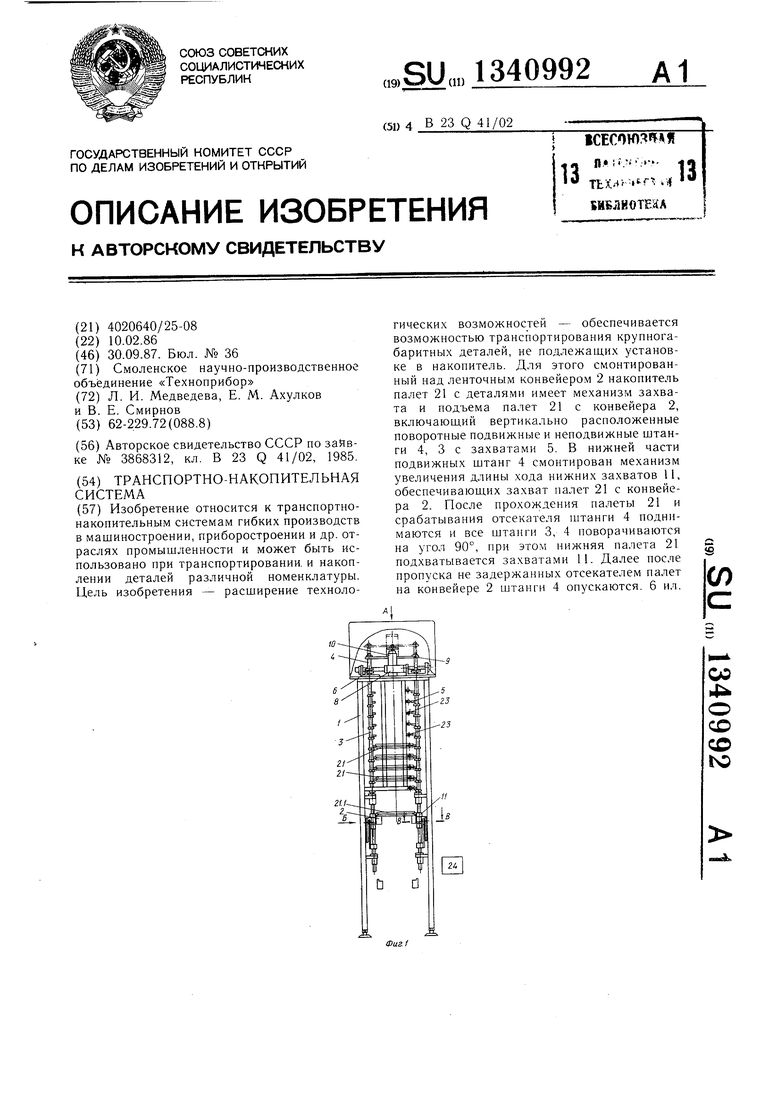
фиг.2
В ид 6
20 18
Фиг.З
к
г- г
фие.6
Составитель А. Котов
Редактор М. ПетроваТехред И. ВересКорректор Н. Король
Заказ 4389/20Тираж 785Подписное
ВНИИПИ Государственного комитета СССР по делам изобретений и открытий
113035, Москва, Ж-35, Раушская наб., д. 4/5 Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная. 4
| Авторское свидетельство СССР по заявке № 3868312, кл | |||
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
