1
(21)4473409/08
(22) 10.08.88
(46) 15.10.91. Бюл.№38
(72) А.Д.Белобров, С.В.Червонников,
Ю.Е.Лахтин и А.И.Белов .
(53)62-229.6 (088.8)
(56)Авторское свидетельство СССР № 1425049, кл. В 23 Q 41/02, 1986.
(54)ТРАНСПОРТНЫЙ РОБОТ С МЕХАНИЗМОМ ПРИЕМА-ВЫДАЧИ ПАЛЕТ
(57)Изобретение относится к машиностроению, в частности к транспортным средствам для обслуживания станков, Цель изобретения - повышение надежности. Механизм приема выдачи палет снабжен промежуточным дополнительным захватом 4. Захваты 8 установлены на качающихся рычагах и выполнены в виде зубчатых колес. При подъеме захват 8 входит в зацепление с зубчатой рейкой 11 палеты 12 и перемещает последнюю на транспортный робот. Далее с зубчатой рейкой 11 входит в зацепление промежуточный дополнительный захват 4. Захват 4 фиксирует палету 12 в транспортном положении или перемещает ее до взаимодействия с противоположным захватом 8. 5 ил.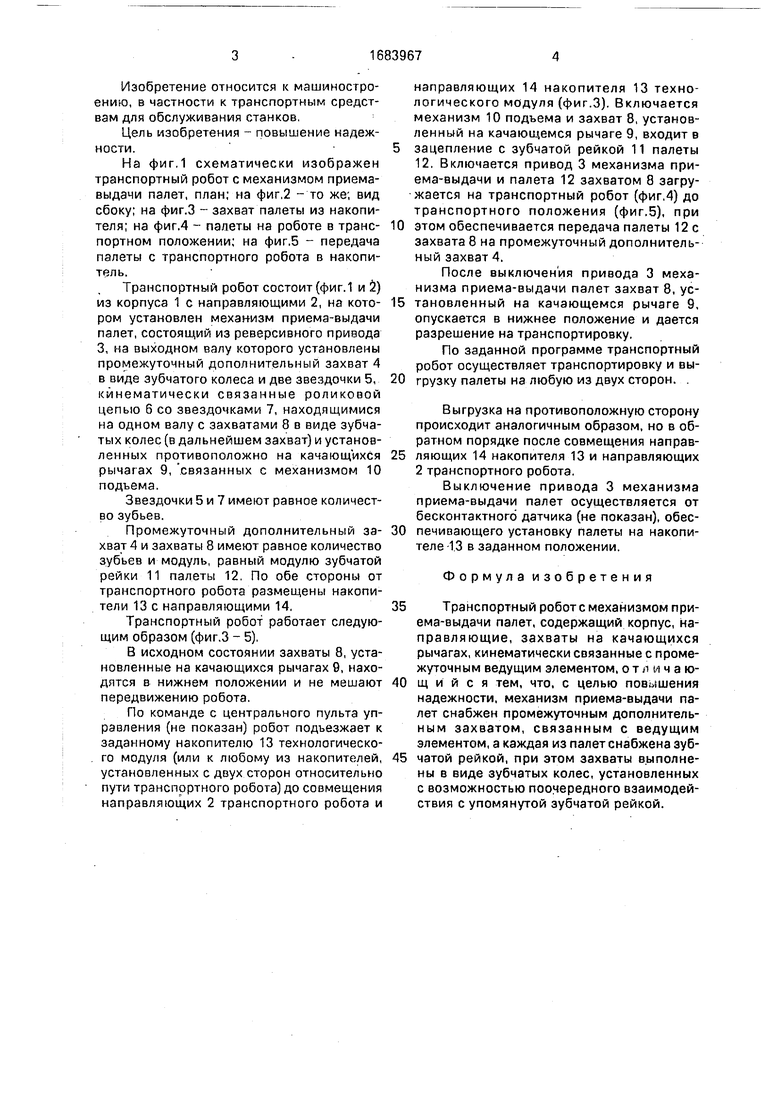
| название | год | авторы | номер документа |
|---|---|---|---|
| Автоматическое загрузочное устройство | 1984 |
|
SU1220783A1 |
| Гибкая автоматизированная линия | 1988 |
|
SU1668104A1 |
| Автоматическая сборочная линия | 1985 |
|
SU1299772A1 |
| Устройство смены палет в гибком производственном модуле | 1986 |
|
SU1425049A1 |
| Гибкий производственный модуль | 1986 |
|
SU1404273A1 |
| Транспортно-накопительная система | 1986 |
|
SU1340992A1 |
| ЗАГРУЗОЧНОЕ УСТРОЙСТВО | 1973 |
|
SU381497A1 |
| Многоцелевой станок с ЧПУ | 1985 |
|
SU1351739A1 |
| Магазин-накопитель деталей | 1986 |
|
SU1366354A1 |
| Механизированный многоярусный накопитель | 1988 |
|
SU1699866A1 |

а
(Л
С
Фиг.З
о
00
со ю
(
i4
Изобретение относится к машиностроению, в частности к транспортным средствам для обслуживания станков,
Цель изобретения - повышение надежности.
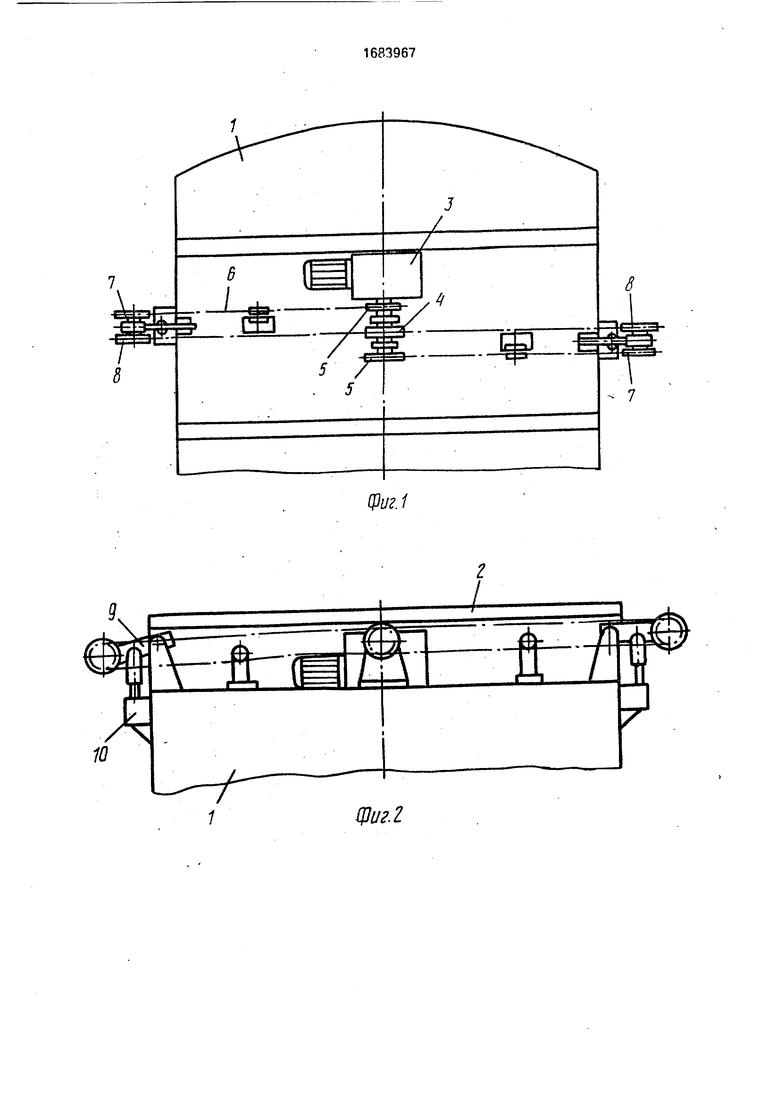
На фиг.1 схематически изображен транспортный робот с механизмом приема- выдачи палет, план; на фиг,2 - то же; вид сбоку; на фиг.З - захват палеты из накопителя; на фиг.4 - палеты на роботе в транспортном положении; на фиг.5 - передача палеты с транспортного робота в накопитель.
Транспортный робот состоит (фиг.1 и 2) из корпуса 1 с направляющими 2, на котором установлен механизм приема-выдачи палет, состоящий из реверсивного привода 3, на выходном валу которого установлены промежуточный дополнительный захват 4 в виде зубчатого колеса и две звездочки 5, кинематически связанные роликовой цепью б со звездочками 7, находящимися на одном валу с захватами 8 в виде зубчатых колес (в дальнейшем захват) и установленных противоположно на качающихся рычагах 9, связанных с механизмом 10 подъема.
Звездочки 5 и 7 имеют равное количество зубьев.
Промежуточный дополнительный захват 4 и захваты 8 имеют равное количество зубьев и модуль, равный модулю зубчатой рейки 11 палеты 12, По обе стороны от транспортного робота размещены накопители 13 с направляющими 14,
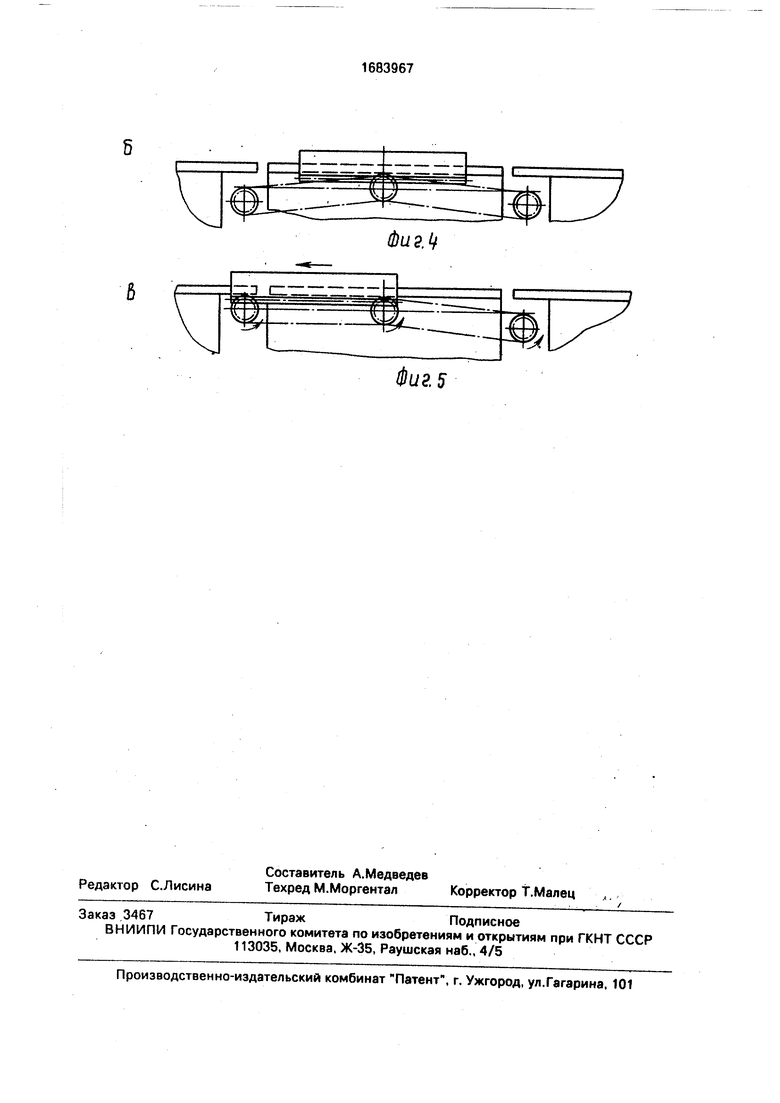
Транспортный робот работает следующим образом (фиг.З - 5),
В исходном состоянии захваты 8, установленные на качающихся рычагах 9, находятся в нижнем положении и не мешают передвижению робота.
По команде с центрального пульта управления (не показан) робот подъезжает к заданному накопителю 13 технологического модуля (или к любому из накопителей, установленных с двух сторон относительно пути транспортного робота) до совмещения направляющих 2 транспортного робота и
направляющих 14 накопителя 13 технологического модуля (фиг.З). Включается механизм 10 подъема и захват 8, установленный на качающемся рычаге 9, входит в
зацепление с зубчатой рейкой 11 палеты 12. Включается привод 3 механизма приема-выдачи и палета 12 захватом 8 загружается на транспортный робот (фиг.4) до транспортного положения (фиг.5), при
этом обеспечивается передача палеты 12 с захвата 8 на промежуточный дополнительный захват 4.
После выключения привода 3 механизма приема-выдачи палет захват 8, установленный на качающемся рычаге 9, опускается в нижнее положение и дается разрешение на транспортировку.
По заданной программе транспортный робот осуществляет транспортировку и выгрузку палеты на любую из двух сторон. .
Выгрузка на противоположную сторону происходит аналогичным образом, но в обратном порядке после совмещения направляющих 14 накопителя 13 и направляющих 2 транспортного робота.
Выключение привода 3 механизма приема-выдачи палет осуществляется от бесконтактного датчика (не показан), обеспечивающего установку палеты на накопителе 13 в заданном положении.
Формула изобретения
Транспортный робот с механизмом приема-выдачи палет, содержащий корпус, на- правляющие, захваты на качающихся рычагах, кинематически связанные с промежуточным ведущим элементом, отличаю0 щ и и с я тем, что, с целью повышения надежности, механизм приема-выдачи палет снабжен промежуточным дополнительным захватом, связанным с ведущим элементом, а каждая из палет снабжена зуб5 чатой рейкой, при этом захваты выполнены в виде зубчатых колес, установленных с возможностью поочередного взаимодействия с упомянутой зубчатой рейкой.
8
10
Щи г. I
Ь
Фиг. Ц
Фиг. 5
