Изобретение относится к машино - строению, а именно к роботостроению и может быть использовано для автоматизации технологических операций на нескольких производственных участках.
Цель изобретения - уменьшение занимаемой площади за счет возможности регулировки габаритных размеров робота в зависимости от величины зоны обслуживания.
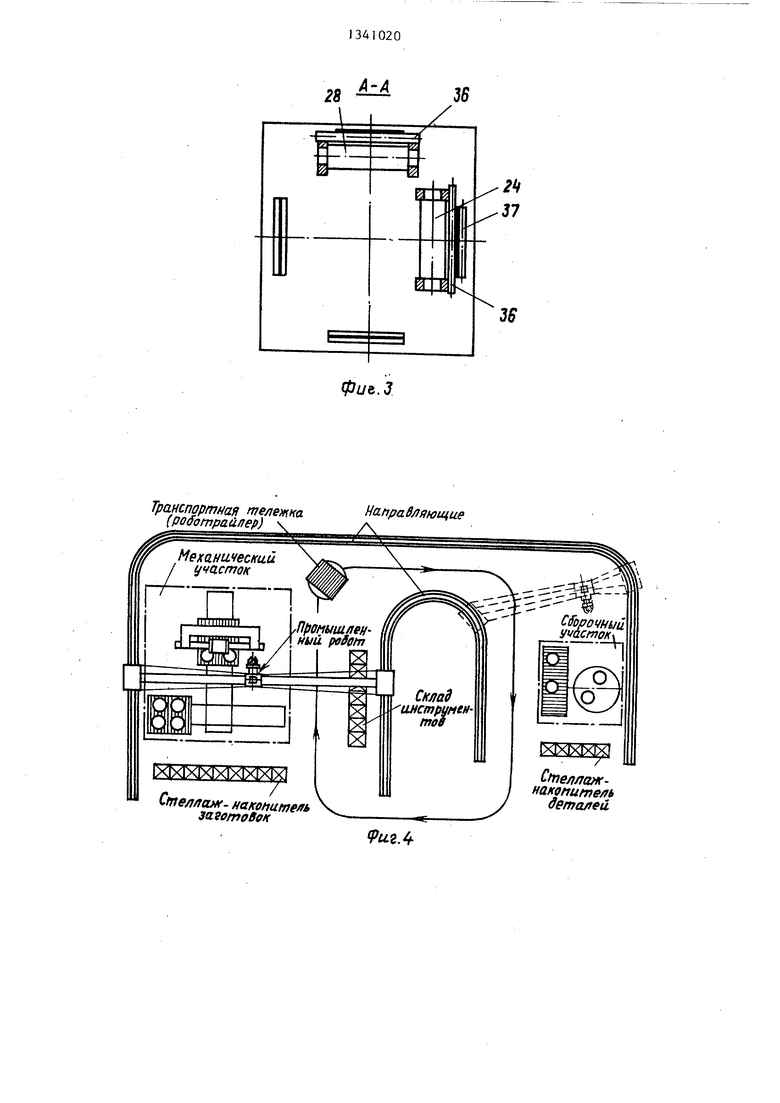
На фиг.1 изображен робот, общий вид; на фиг.2 - конструкция стоек и траверсы с кареткой; на фиг.З - разрез А-А на фиг.2; на фиг.4 - планировка размещения робота при обслуживании нескольких участков; на фиг.5- зона обслуживания участков.
Устройство содержит основание (не показано) с направляющими 1 (фиг.1), подвижные по направляющим 1 салазки 2 и 3, портал 4 с направляющими, траверсу 5, связанную с подвижными по направляющим салазками 6 и 7, каретку 8, в корпусе 9 : , (фиг.2) которой размещена механическая рука 10, приводные гибкие элементы 11-20, выполненные в виде лент, одним концом намотанные на соответствующие приводные барабаны 21-28 и натяжные барабаны 29 и 30, Ленты 11-12 пропущены сквозь щели, выполненные в корпусе 9, и охватывают ролики 31, установленные в пазах корпуса 9. Ленты 13 и 14 пропущены также сквозь щели, выполненные в корпусах 32 и 33 соответственно, охватывают ролики 34 и огибают ролики 35, установленные в этих корпусах. Ленты 15 и 16 пропущены сквозь щели в корпусе 32, а ленты 17 и 18 - сквозь щели в корпусе 33, те и другие охватывают ролики 35. Ленты 13-20 охватывают ролики 36, установленные на салазках 2,3,6 и 7. Ролики 31, 34 -36 стабилизируют прямолинейность перемещений механической руки 10 вдоль трех взаимно перпендикулярных координат y,X,Z при любых промежуточных положениях корпусов 9,32 и 33 между салазками 2,3,6 и 7. Для предотвращения соскальзывания, лент 13 и 14с барабанов 23,24,29 и 30 установлены механизмы 37 прижима ленты.
Устройство работает следующим образом.
Установку на координату X осуществляют синхронным перемещением салазок 2,3,6 и 7 вдоль направляющих по команде из системы управления,.затем механическая рука 10 выводится в рабочую позицию по координатам У и Z.
Установку на координату У производят одновременным вращением приводных барабанов 21-24. При наматывании лент 11 и 13 на барабаны 21 и 23 ленты 12 и 4 сматываются с барабанов 22 и 24 и механическая рука 10 перемещается влево (фиг.1)
Перемещение руки 10 вправо осуществляют реверсивным вращением приводных барабанов 21-24.
Установку на координату Z производят одновременным вращением приводных барабанов 25-28. При наматывании лент 15 и 17 барабаны 25 и 27
ленты 16 и 18 сматываются с барабанов 26 и 28 и механическая рука 10 перемещается вверх. Перемещение руки 10 вниз осуществляют реверсивным вращением приводных барабанов 25-28.
По мере того, как корпуса 32 и 33 смещаются по оси от среднего положения, натяжные барабаны 29 и 30 и ба- рабаны 23 и 24 поворачиваются в ту или иную сторону, подтягивая или
отпуская ленты 19,20,13 и 14.
При перемещениях механической руки с одного производственного участка на другой (фиг.4 и 5), когда сдвигаются, раздвигаются, направляющие
или изменяется направление движения, порядок работы его приводов в основ-, ном аналогичен описанному. Отличие состоит в том, что ленты 11,12,15- 18 (фиг,2) работают, а ленты 13,14,
19 и 20 освобождаются, при этом
слабина выбирается вращением барабанов 23,24,29 и 30, Механизмы 37 прижима предотвращают соскальзывание ленты с барабанов 23,24,29 и 30.
Формула изобретения
Промьшшенный робот, содержащий основание с направляющими, на которых установлены две стойки с траверсой, каретку с механической рукой, смонтированную на траверсе с возможностью перемещения вдоль нее, и привода каретки, траверсы и механичес- кой руки, отличающийся тем, что, с целью уменьшения занимаемой площади путем обеспечения возможности регулировки габаритных размеров робота в зависимости от вели
чины зоны обслуживания, основание снабжено дополнительными опорами с направляющими, каждая стойка выполнена в виде двух салазок с роликами и связывающих салазки гибких элементов, траверса выполнена в виде двух корпусов с роликами и гибких элементов, связывающих эти корпуса с кареткой, которая также снабжена дополнительными роликами, причем основные и дополнительные направляющие смонтир ованы на основании с воз
нежностью регулировки расстояния между ними, салазки каждой стойки размещены на упомянутых основной и дополнительной направляющих, корпуса траверсы размещены на гибких элементах соответствующих стоек, а поворотные выходные элементы приводов каретки и траверсы вьтолнены в виде барабанов с намотанными на них дополнительными гибкими элементами, которые контактируют с соответствующими роликами салазок, корпусов и каретки.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для механической обработки | 1985 |
|
SU1491669A1 |
| Исполнительный орган промышленного робота | 1987 |
|
SU1493462A1 |
| Исполнительный орган промышленного робота | 1987 |
|
SU1437220A1 |
| Исполнительный орган промышленного робота | 1988 |
|
SU1521589A1 |
| Следящий электропривод с барабанно-роликовым исполнительным элементом | 2023 |
|
RU2815271C1 |
| Исполнительный орган рулевого привода | 2020 |
|
RU2774113C2 |
| Исполнительный орган рулевого привода | 2020 |
|
RU2774236C2 |
| Исполнительный орган промышленного робота | 1988 |
|
SU1530441A1 |
| Промышленный робот | 1986 |
|
SU1371896A1 |
| Автоматический станок для штамповки изделий из листового материала | 1949 |
|
SU84445A1 |


Изобретение относится к машиностроению, а именно к роботостроению, и может быть использовано для авто- мат 1зации технологических операций на нескольких производственных участках. Цель изобретения - уменьшение занимаемой площади за счет возможности регулировки габаритных размеров робота в зависимости от величины зоны обслуживания. При регулировке расстояния между направляющими 1 гибкие - элементы 16 и 11 соответственио стоек и траверсы с помощью приводов натягиваются, обеспечивая треб.уёмые размеры между салазками 2,3, 6 и 7 .и корпусами 32 и 33. Привод салазок, корпусов и каретки 8 с механической рукой 10 также осуществляется с помощью гибких элементов. 5 .ил. сл ,t
///////
Фиг. 2
//////
xl-xt
фи&.З
Транспортная (pofotnpauflep)
IX1X1XIXIX1X1XIXM
Ctneflftcuff- на/cofjumfM 3ti9otnoBpK
Направляющие /
tXlXIXEXIXI
/
Сп1елла е- иакопите/tk demoflfu
.г.
fuSefee пространство машпу/т- тора при oScffj/MufuHuu стеялажй-накопится
Рабочее пространство нанипулятора на нехй- ническом участке
Paffffvee прострою
Sff HuHunyaftmopa
на сборочном участке
Vut.Si
Редактор М.Петрова
Заказ 1818/2Тираж 908Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, А
Составитель Ю.Вильчинский
Техред М.Ходанич - Корректор С.Шекмар
| Манипулятор | 1978 |
|
SU770784A1 |
