1
13Д
Изобретение относится к машиностроению и может быть использовано в манипуляторах,, предназначенных для автоматизации операций загрузки и выгрузки деталей.
Цель изобретения повышение надежности и расширение технологических возможностей за счет того, что з.ахват снабжен компенсирующими элементами ,
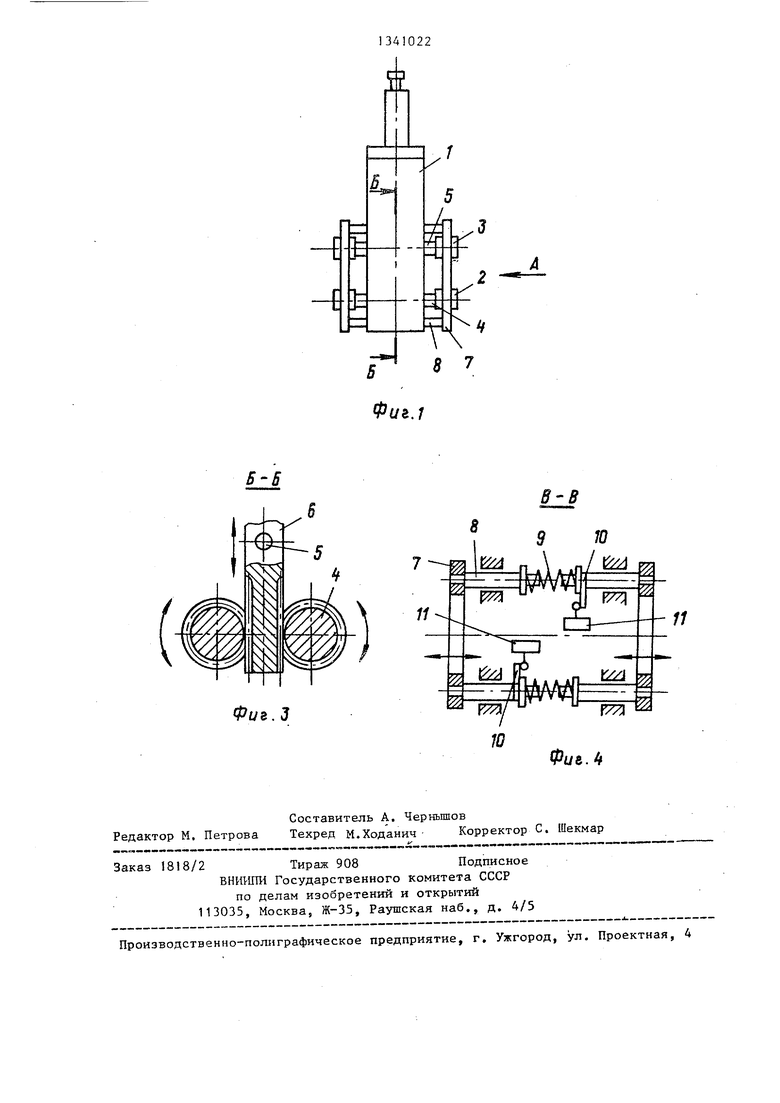
На фиг о 1 показан вариант конструкции захвата для подшипниковых щитов электродвигателей; на фиг. 2 вид А на фиг. 1; на фиг.. 3 - разрез Б-Б на фиг, 1; на фиг. 4 разрез В-В на фиг. 2,
Захват содержит корпус 1,, зажимные кулачки 2 и 3, установленные по обе стороны корпуса 1 на вал шестер- нях 4 и осях 5 приводного реечного механизма 6, компенсирующие базы (элементы) 7, установленные по обе стороны корпуса 1 на подвижных направляющих 8, подпружиненных относи- тельно одна другой пружинами 9, упоры 10, установленные на подвижных направляюпщх 8, элементы I автомати ки, установленные на корпусе 1.
Захват работает следующим обра- 3 ом.
Захват рукой манипулятора выводится в исходное положение для взятия детали, рзсположеяной в накопителе или подающем устройстве. Приводной реечный механизм 6 устанавливает зэлшмь-ме кулачки 2 и 3 в исходное положениеi, поЗБОпяющее вводить их на базовую поверхность детали, Движв - нием руки манипулятора зажимные кулачки 2 и 3 вводятся на базовую поверхность детали до нажатия на компенсирующую базу 7., которая вместе с подвижными направляюш.ими 8 переме™ щается,, сжимая пружины 9 до тех nop пока упор 10 войдет в контакт с элемектом 11 автоматики(, после чего руха манипул51тора останавливается.
2
Величина хода компенсирующей базы 7 определяется технологическим процессом и регулируется положением элементов 11 автоматики. Затем приводной реечный механизм 6 перемещает зажимные кулачки 2 и 3 и зажимает деталь.; при этом пружины 9 остаются сжатыми, а компенсирующая база 7
смещена от исходного положения на заданную величину. Движением руки манипулятора захват с зажатой деталью перемещается в, станочное приспособление (кулачковый патрон) .обра
батывающего оборз дования. Срабатывает приводной реечный механизм.6 и ставит зажимные кулачки 2 и 3 в исходное положение. Деталь освобожда ется от зажимных усилий и под дей-
ствием пружин 9 и К1эмпе сир5тощей
базы 7 досылается до базовой псверх- дости. Освобожденная от зажимных у силий и сбазированная по торцу деталь зажимается станочным приспособлением, одновременно производя-базировку поперечного положения о,си детали.
Формула из Обретения
Захват мани:пулятора, содержащий корпус, зажимньге кулачки и приводной зубчато -реечный механизм, о т л и - ч а ю щ и и с я тем, чго, с целью повышения надежности и расширения
технологических возможностей, он снабжен компенсирующим элементом, выполненным в виде со штырями, расположенными в отверстиях, вы- полненных в ксфпусе, с возможностью взa iмoдeйcтвия с дополнительно введенными элементами автоматики, при этом компенсирующий элемент расположен в зоне действия зажимных ку- лачхов и подпружинен относительно
корпуса в направлевин, перпенд.ику- лярном направлению перемещения рейки зубчато реечного механизма.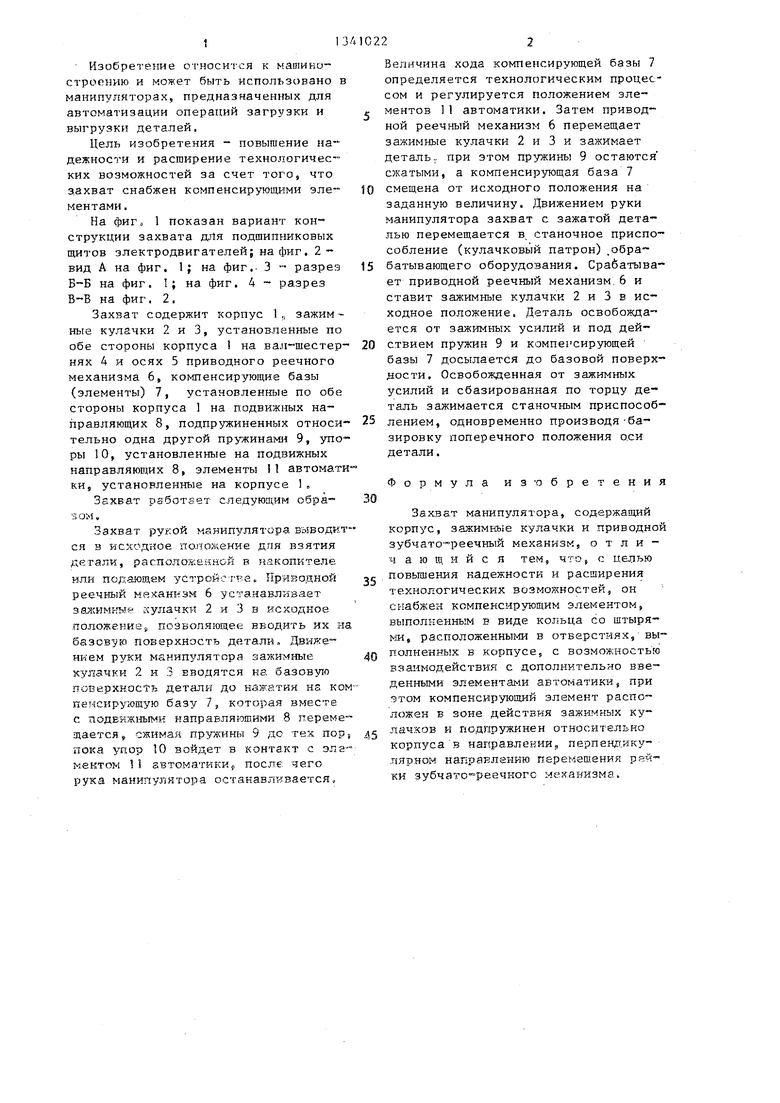
| название | год | авторы | номер документа |
|---|---|---|---|
| Зажимное устройство | 2017 |
|
RU2646298C1 |
| Манипулятор | 1988 |
|
SU1618639A1 |
| Промышленный робот | 1986 |
|
SU1371896A1 |
| Захват | 1977 |
|
SU667396A1 |
| Схват | 1986 |
|
SU1315303A1 |
| Роботизированный технологический комплекс | 1987 |
|
SU1465264A1 |
| Способ загрузки токарных полуавтоматов деталями для их двусторонней обработки и автоматическая линия для его осуществления | 1988 |
|
SU1662807A1 |
| Гибкий производственный модуль | 1986 |
|
SU1404273A1 |
| Многопозиционное зажимное устройство | 1981 |
|
SU975305A1 |
| Схват манипулятора | 1981 |
|
SU965655A1 |
Изобретение относится к машиностроению и может быть использовано в манипуляторах, предназначенных .для автоматизации операций загрузки и выгрузки деталей. Целью изобретения является повышение надежности и расширение технологических возможностей. Компенсирующие элементы 7 компенсируют погрешность позиционирования манипулятора и расположены на , подвижных направляющих 8, подпружиненных относительно корпуса 1 в зоне действия зажимных кулачков 2 и 3. Величина хода компенсирующих элементов 7 контролируется элементами автоматики, установленными в корпусе 1. 4 ил. ноо Вид4 с (Л со 4 К tC В
| Захват механической руки | 1976 |
|
SU566731A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
