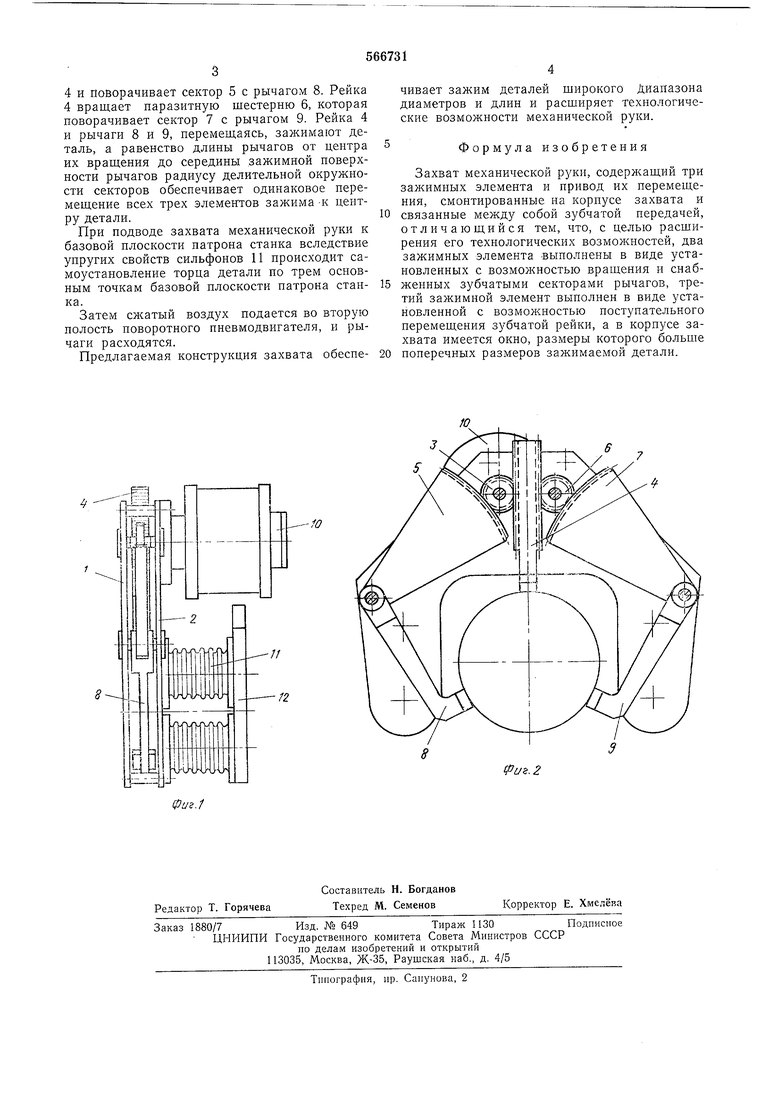
4 и поворачивает сектор 5 с рычагом 8. Рейка 4 вращает паразитную шестерню 6, которая поворачивает сектор 7 с рычагом 9. Рейка 4 и рычаги 8 и 9, перемещаясь, зажимают деталь, а равенство длины рычагов от центра их вращения до середины зажимной поверхности рычагов радиусу делительной окружности секторов обеспечивает одинаковое перемещение всех трех элементов зажима -к центру детали.
При подводе захвата механической руки к базовой плоскости патрона станка вследствие упругих свойств сильфонов 11 происходит самоустановление торца детали по трем основным точкам базовой плоскости патрона станка.
Затем сжатый воздух подается во вторую полость поворотного пневмодвигателя, и рычаги расходятся.
Предлагаемая конструкция захвата обеспечивает зажим деталей щирокого Диапазона диаметров и длин и расширяет технологические возможности механической руки.
Формула изобретения
Захват механической руки, содерл ащий три зажимпых элемента и привод их перемещения, смонтированные на корпусе захвата и
связанные между собой зубчатой передачей, отличающийся тем, что, с целью расширения его технологических возможностей, два зажимных элемента выполнены в виде установленных с возможностью вращения и снабженных зубчатыми секторами рычагов, третий зажимпой элемент выполнен в виде установленной с возмол ностью поступательного перемещения зубчатой рейки, а в корпусе захвата имеется окно, размеры которого больше
поперечных размеров зажимаемой детали.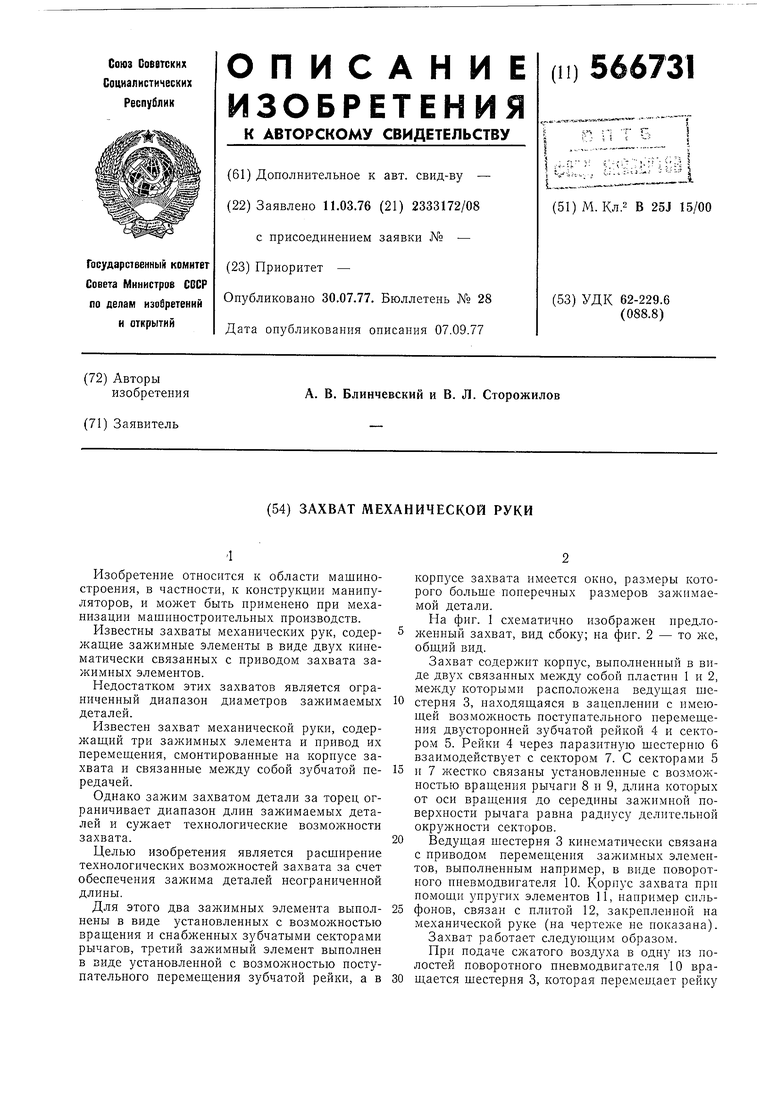
| название | год | авторы | номер документа |
|---|---|---|---|
| Схват промышленного робота длябОбиН C пРяжЕй | 1979 |
|
SU806406A1 |
| Манипулятор | 1988 |
|
SU1618639A1 |
| Механическая рука | 1979 |
|
SU850350A1 |
| Загрузочное устройство | 1985 |
|
SU1298038A1 |
| Манипулирующее устройство | 1985 |
|
SU1261792A1 |
| Схват робота | 1986 |
|
SU1350004A1 |
| Схват | 1983 |
|
SU1098790A1 |
| Манипулятор | 1985 |
|
SU1313691A1 |
| Манипулятор | 1991 |
|
SU1813620A1 |
| Зажимное устройство | 1984 |
|
SU1256900A1 |
/2
iflus.2
