113
Изобретение относится к магаино- строению и может быть использовано в промьппленных роботах и манипуляторах.
Цель изобретения - повьшение точности базирования и надежности работы фиксацией детали в двух плоскостях.
На фиг. 1 показано захватное уст- ройство, продольный разрез; на фиг. 2 т6 же, вид сверху.
Захватное устройство закрепляется на исполнительном механизме 1, например, механической руки, промьш- ленного робота или манипулятора, состоит из корпуса 2 и закрепленного на нем силового цилиндра 3 со штоком 4. На корпусе 2 закреплены с возможностью проворота на осях 5 щечки 6, вы- полненные с пазами 7, а к штоку 4 силового цилиндра 3 прикреплен под- вижной элемент 8, вьтолненный в виде планки.
На подвижном зажимном элементе 8 закреплены пальцы 9, расположенные в пазах 7 щечек 6. На корпусе 2 симметрично относительно продольной оси расположены колонки 10,. на кй- торых установлен неподвижный зажимной элемент 11 с рабочей поверхностью 12, являющейся базирующей поверхностью транспортируемого изделия 13. Между торцом колонки 10 и неподвижным зажимным элементом I1 с целью точного выставления изделия вдоль оси исполнительного механизма размещены компенсируищие шайбы 14. Последние прикреплены к корпусу винтами 1 5 , а неподвижный зажимной элемент 11 гайками 16.
Захватное устройство работает следующим образом.
5 0
5
0
5
0
С помощью робота или манипуляторе захватное устройство вводится в рабочую зону, где размещается на одной оси с подлежащим транспортировке изделием 13. Затем захватное устройство надвигается на транспортируемую деталь таким образом, что рабочие поверхности 12 неподвижного зажимного элемента 11 скользят вдоль образующих изделия 13. Когда деталь оказывается в зоне между нижними и верхними щечками 6, поступает команда от датчика (не указан) на подачу давления в силовой цилиндр 3 и щток 4 с закрепленным на нем подвижным зажимным элементом 8, прижимая изделие 13 к рабочим пов ерхностям 12 неподвижного зажимного элемента 11. При этом происходит зажатие и центрирование детали.
Одновременно с подвижным зажимным элементом 8 перемещаются закрепленные на нем пальцы 9, которые скользят по пазам щечек 6. Последние поворачиваются вокруг осей 5 и охватывают торцы изделия 13, препятствуя его перемещению вдоль вертик 1льной оси.
Формула изобретения
Захватное устройство, содержащее корпус, зажимные элекенты, один из которых приводной, а другой жестко соединен с корпусом, отличающееся тем, что, с целью повыг шения точности базирования и надеж- - ности работы, оно снабжено двумя пирами шарнирно установленных на корпусе щечек с пазами, а в приводном зажимном элементе установлены дополнительно введенные пальцы с возможностью расположения их в пазах щечек.
У
К
ВНИИГШ Заказ 1818/2
Тираж 908
Произв.-полигр. пр-тие, г. Ужгород, ул. Проектная,
Подписное
ектная, 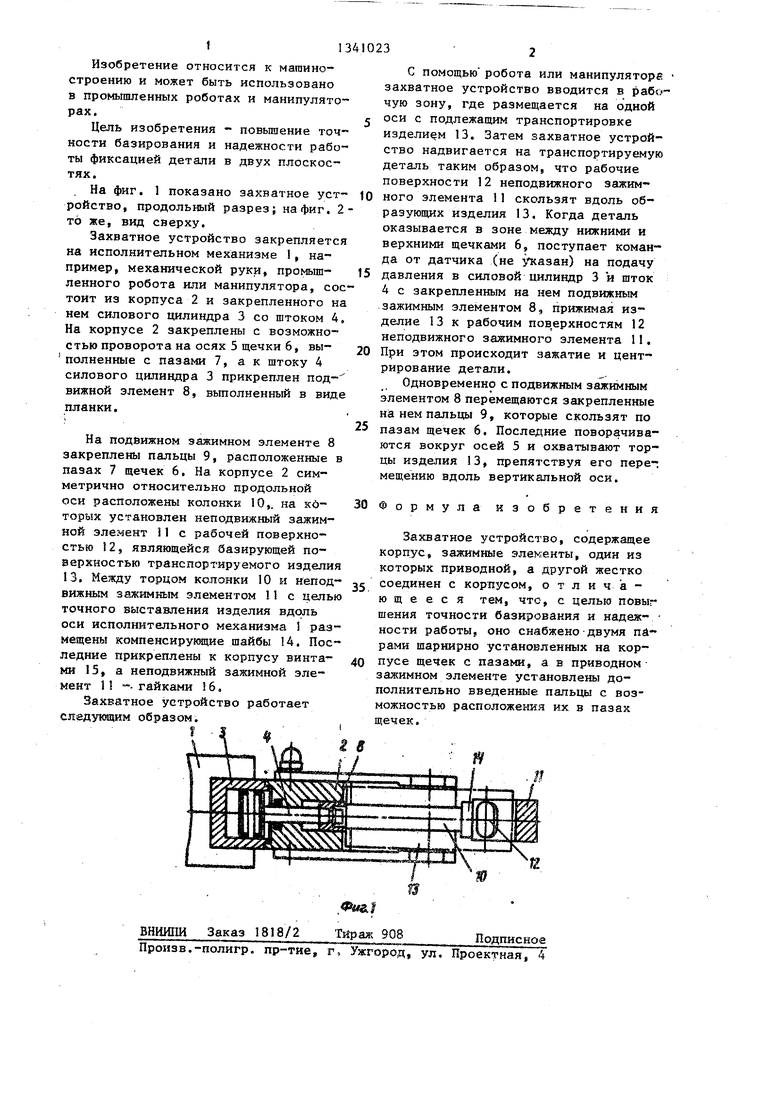
| название | год | авторы | номер документа |
|---|---|---|---|
| Захватное устройство манипулятора | 1987 |
|
SU1521581A1 |
| Схват робота | 1990 |
|
SU1761463A1 |
| МНОГОПОЗИЦИОННОЕ ЗАХВАТНОЕ УСТРОЙСТВО МАНИПУЛЯТОРА | 1992 |
|
RU2033918C1 |
| Приспособление-спутник для закрепления комплекта собираемых деталей к сборочному автомату | 1984 |
|
SU1541000A1 |
| Центрирующее захватное устройство | 1985 |
|
SU1283099A1 |
| Грузозахватное устройство | 1991 |
|
SU1787922A1 |
| Автомат для изготовления проволочных пружин сложной конфигурации | 1987 |
|
SU1461571A1 |
| Захватная головка манипулятора | 1986 |
|
SU1342727A1 |
| Технологический комплекс для обработки цилиндрических деталей | 1989 |
|
SU1761436A2 |
| Захватное устройство | 1991 |
|
SU1815213A1 |
Изобретение относится к машиностроению и может быть использовано в промьшленных роботах и манипуляторах. Целью изобретения является повышение точности базирования и надежности работы, достигаемое фиксацией детали в двух плоскостяк. Захватное устройство состоит из кор6 пуса 2, в котором установлен непри- водной зажимной элемент 11. На корпусе 2 закреплены щечки 6 с возможностью вращения на осях 5, установленных в корпусе 2. В щечках 6 находятся пазы 7, в которых рас по- ложены пальцы 9, установленные в подвижном зажимном элементе 8. Захватное устройство подводится к де тали 13 таким образом, что рабочие поверхности 12 неприводного зажимного элемента 11 скользят вдоль образующих детали 13. Когда деталь 13 оказывается в зоне между нижними и верхними щечками 6, включается привод, перемещающий зажимной элемент 8, который прижимает деталь 13 к рабочим поверхностям 12 зажимного элемента 11. Одновременно с зажимным элементом 8 перемещаются в пазах 7 пальцы 9, поворачивая относительно осей 5 щечки 6, которые охватывают торцы детали 13. 2 ид. сл 00 4
| Захват манипулятора | 1982 |
|
SU1033310A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
