1
Изобретение относится к области станкостроения, Б частности,к механизации и автоматизации загрузки-выгрузки деталей Б металлорежущих станках.
Известна конструкция автоматического манипулятора для обслуживания нескольких единиц технологического оборудования, например, для многостаночного обслуживания имеющая кисть руки с одним ила двумя схватами ll .
Недостатком известной конструкции манипулятора является необходимость переноса деталей одним, для каждой из них, захватом от позиции загрузки на позицию обработки что снижает технологические
возможности манипулятора.
Кроме этого, известный манипулятор требует значительного вспомогательного времени при обслуживании оборудования, что снижает его производительность.
Цель изобретения является расширение технологических возможностей манипулятораи повышение его производительности.
Это достигается тем, что кисть руки
выполнена в виде многопозиционкой го- ловкн-накопателя, установленной с воэможностью поворота относительно оси кисти.
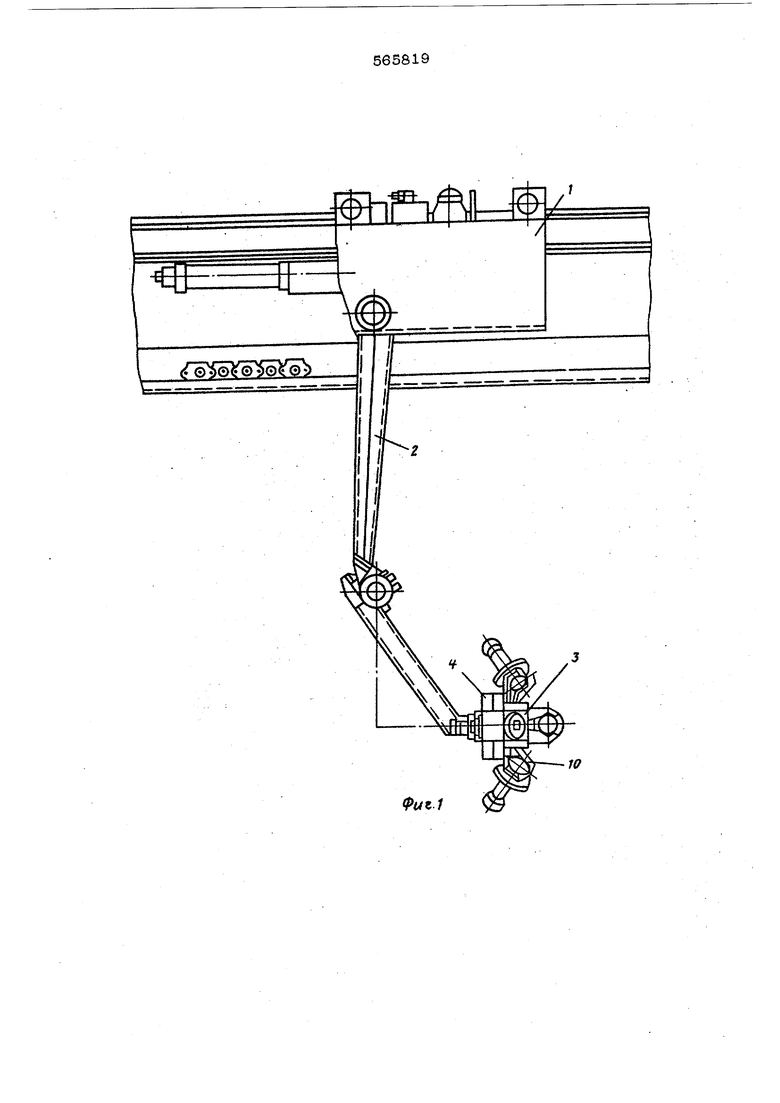
На фиг, 1 показан автоматический манипулятор, общий вид, на фиг. 2 - поворотная головка-накопитель; на фиг. 3 - схема относительного расположения поворотной головки-накопителя и оборудования.
Автоматический манипулятор состоит из каретки 1, к нижней части которой крепится рука 2 с кистью в виде многопозициной поворотной головки-накопителя 3. Она состоит в свою очередь :из корпуса 4,
внутри которого расположены гидроцилиндр 5 разжима и гидроцилиндр 6 поворота и фиксации ; оск 7 с державкой 8, несушей на себя клинья I.Q к схваты 10, расположенные веерообразно к оси вращения кисти.
При такой компоновке головки-накопнтеля 3 на рабочей позиции оборудования (фиг. 3) находится только одна деталь, которую свободно завести в при- способленивI или закрепить в центрах станка. Остальные детали, расположенные вокруг корпуса головки-накопителя, представляют компактнь1й узел,.с помощью которого можно обспужвпаать объекты рабрче& зоны. Автоматический манипулятор работает следукяаим образом. Каретка 1 перемешается из исходного положения к общему накопителю заготовок на чертеже не показан). Схваты 10 оловки- акопнтеля 3 на одной на позвцкй: раскрыты.. При подходе каретки 1 к накопителю .заготовок рука 2 опускается, шт гидроцнлиндра 5 убирается, клин 9 дейстBj eT на схваты 10, которые зажимают за готовку. После этого срабатывает гидроцилиндр 6 поворота и фиксаций, ось 7 с д жавкой 8 н зажатой заготовкой поворачиваются относительно .корпуса 4. Аналогичным образом загружаются и другие заготовки. При наполнении головки накопителя 3 заготовками рука 2 подиимается и каретка 1 перемешается к первому станку. Рука 2 опускается. СхвЬты 10 головки-накопителя 3 при действии клина 9 зажимают обработанную деталь, и она вьшодится из патрона станка. Далее происходит поворот державки 8 со схватами 10 и с заготовками на одну позицию, после поворота новая заготовка загружается в патрон станка. Схваты 10 азжимают заготовку и рука 2 подымаетя, каретка 1 перемешается ко второму танку. Работа автоматического манипулятора о вторым и последующими станками поворяется аналогвчно. После обслунвшанЕЯ последнего ставка к етка перемешается к накопителю готовых еталей| при подходе к которому рука 2 пускается с готовыми деталями Провсховт их последовательная разгрузка. По окончании разгрузки г чрука подимается и каретка 1 перемешается к наопителю заготовок. Далее цикл повторяется. Формула изобретения . Автоматический манипулятор для многостаночного обслуживания, содержащий подвижную каретку н руку, оснащенную кистью, отличающийся тем, что, с целью расширения тахнслогических возмоягюстей я повышения производительное КЕСть руки маншхулятора выполнена в виде многопозишонной головк -нак{Я1Ятел а, уста новленной с возможностью поворота относительно оси кисти,-. Источники информации, принятые во внгйманне приэкспертизе: 1. Белянин П. Н. Промышленные роботы, М. т Машиностроение, 1975, с.8587.
we./
Фи.г
Фиг. 5
| название | год | авторы | номер документа |
|---|---|---|---|
| Автоматический манипулятор | 1980 |
|
SU944918A1 |
| Гибкий производственный модуль | 1986 |
|
SU1404273A1 |
| Способ загрузки токарных полуавтоматов деталями для их двусторонней обработки и автоматическая линия для его осуществления | 1988 |
|
SU1662807A1 |
| Автоматизированная технологическая единица | 1977 |
|
SU659375A1 |
| Промышленный робот | 1982 |
|
SU1125127A1 |
| Роботизированный технологический комплекс | 1987 |
|
SU1465264A1 |
| Автоматическая линия | 1984 |
|
SU1187962A1 |
| Переналаживаемая роботизированная система | 1981 |
|
SU998097A1 |
| Робототехнический комплекс | 1986 |
|
SU1425036A1 |
| Продольно-обрабатывающий станок | 1987 |
|
SU1511054A1 |