Изобретение отноеится к . 1еройным мгниинам, а именно к viaiuHnaM с шагающим ходовым обор лованием.
1Де. 1ь и:и)бретения - новьинение надежности.
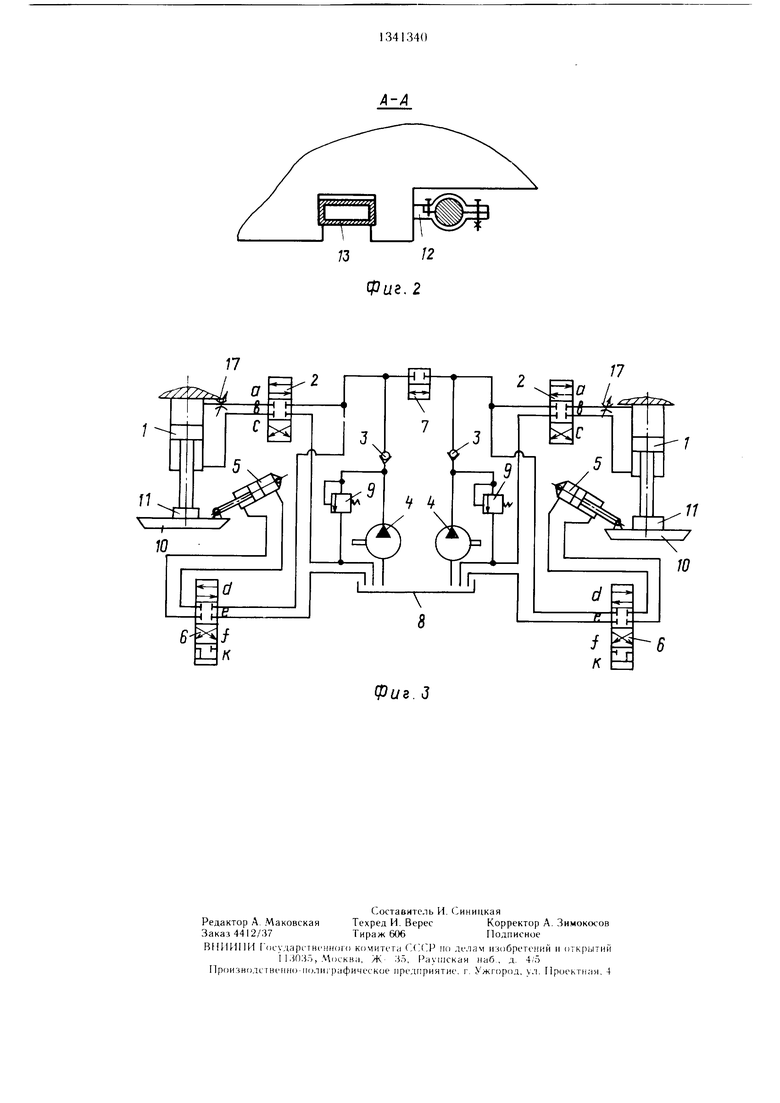
На (})иг. 1 изображен :(кскаватор, вид сбоку; на фиг. 2 сечение .Л - А на ())иг. 1; на фиг. .}гидравлическая схема привода ходового оборудования.
Гидропривод ходового оборудования ша- аюиито :)Кскаватора содержит под ьемные 1 идроии.:1ин.1.|)ы 1, подключенные через рас- нреде. 1ите,1и 2 и обратные клапаны . к насосным усгановкам 4; тяговЬ)1е гидроцилинд- |) 5, п()дклк.)ченные к насосным установкам 4 через распределители 6, раз 1,еди- нитель 7, бак 8. 11редохраните, к.ча- паны 9, опорные башмаки (, скользу- ны 11 опорных бан1мак()в, тяги 12, оноры Ь5 ско.чьжения, направляющие 14 опор ско, жения, базу 1Г), стре.пу 16 и д 1оссель 17.
7
Гидропривод ходов()1Ч) оборудования ina- ган)П1его экскаватора работает сле- дук)П1им образом.
При подъеме укскавато()а жидкость подается от насосной установки 4 через обрат- НЫ11 K. ianan 3, позипию а расп|)еделителя 2 в по)П1певук) полость нодьемногч) (пдроци- липд()а 1. Экскаватор при этом новорачи- )ается за.чней по ходу движения кромки базы 1 Г) (кромки со cTO)ofibi стре : кскава 1 ора I. Вместе с экскаватором поворачивается и подbCMiUiiii i идроци-чиндр 1 HITOK которого перемеп1ает скользун 1 I по ходу движения экскаватора. В это время распреде.иггель (i находится в положении k, т.е. обеспечивает н, 1авакмнее по.юженпе ско, 1ьзуна 11. При неремеп1ении экскаватора распредсмиге.ть 2 паходичся в по.ю- женип 1), а распределитель fiо положепии 1. Жи.чкость от nacocnoii установки 4 подается через обратный к.1апан 3, распределите.пь ( (поз. I) в uiTOKoisyK) но- , К)сть ТЯГОВОМ) ги. цюцилиндра 5. Экскаватор nepcMenuie гея в сгорону, п|)огив(Я1ол()Ж- нук) стреле Iti. при этом скол1)3уны 11 ско. 1Ьзят но 01П) бап1макам И), задняя кромка базы 15 во.ючится по i рупту. Опора 13 скольжения в это время неподвижна и воснринимас п.)гибак)П1ие на1рузки, которые нередаются от но.гьемноп) гидроцили1 дра 1 через тягу 12, жая пп ок I идроцилиндра 1.
20
При опускании экекаватора распреде- .питель 2 находится в ноложении с, распределитель 6в ноложении k. Насосная установка 4 гкхчает жидкость в HITOKO5 вую полость нод1,емпого гидроцилиндра 1, из норп1невой НОЛОС1И жидкость дросселируется регулируемым дросселем 17 для плав- lioro опускания экскаватора. Экскаватор пово)ачивается вок)у1 задней кромки базы
.Q 15. при этом скользуны 11, находясь в плавающем положении, перемеп1ак)тея пазад, в сторону стрелы 16.
После опускания экскаватора дроссель 17 полностью открывается, происходит нодьем опорных ба1пмаков 10.
15 П)и пе)емеп1.ении опо)пых башмаков 10 в исходное юложение распределитель 2 пере- водитея в по.южение 1), распреде, 1итель 6 в по,1ожен11е il; жидкосп, от Hacocnoii установки 4 подается через обратньи к.танан 3 и рас11реде;1ите, 1ь Г) в по)1пневую нолоеть тягоЕюго идропи. 1ипдра 5, а из 1нтоковой по.юсти идет на в бак 8.
При опускапип опорных бан1мак()в 10 на г)унт |)аспредели гель 2 переводится в положение а, распре.дел1ггель (iв иоложе25 ние е; жидкое ь от насосной установки 4 подается в порп1певук) no,iocri) подьемпо- го гп.чропи. шндра 1, а из п1токовой полос гп по1-| паег в бак 8. Да.К с пик. 1 иов- Г()р;яетс5г Л. 1Я пер(.ода на ин.1ивидуа,1ьный п|1пвод рабоП) нк 1н.1чается авгоматически
30 p;i С1,едппите,1ь 7.
.1ч и: чГ}рсгени.ч
Гпдроп)ивод ходов И() оборудования ша- raionieixj экс каватора, вкл1очаюпи1Й onopiuiie
35 бап1макп, соедипеппые со ско. 1ьзунами, .а- К нм1леп111)1ми па П1тока подьемпых гидро- пилппдров. распо.1оже1П1ЫХ на по)())отной плаг(|орме, тяговые гидропилипдры и гид- poaniia)a lypy ун)авле1П1я гид)оци. И1Ндрами, огличтощпис / тем, что. с целью новьппения надежности, приво.ч снабжен вертикал1)Н() распо,тожен11ыми (i пово|)отпой платформе опорами скольжения, парал.те.1ЬН(.) оеям кого- рыч расположеШ) оси подьемных шдропи- , 1ипдров, при этом их П1ТОКИ и опоры ско.тьд5 жения связаны между собой посредством ГЯ1, а i идроаипара гу|)а имеет насосы и гид- )орас11реде,1и 1е,чи, с которыми соединены гя- говые гидр(И1Илиндры с возможностью обеспечении п. 1авак)пи 1ч) И(),1оже1П(я гидропи- , 1ипдров под ьема.
40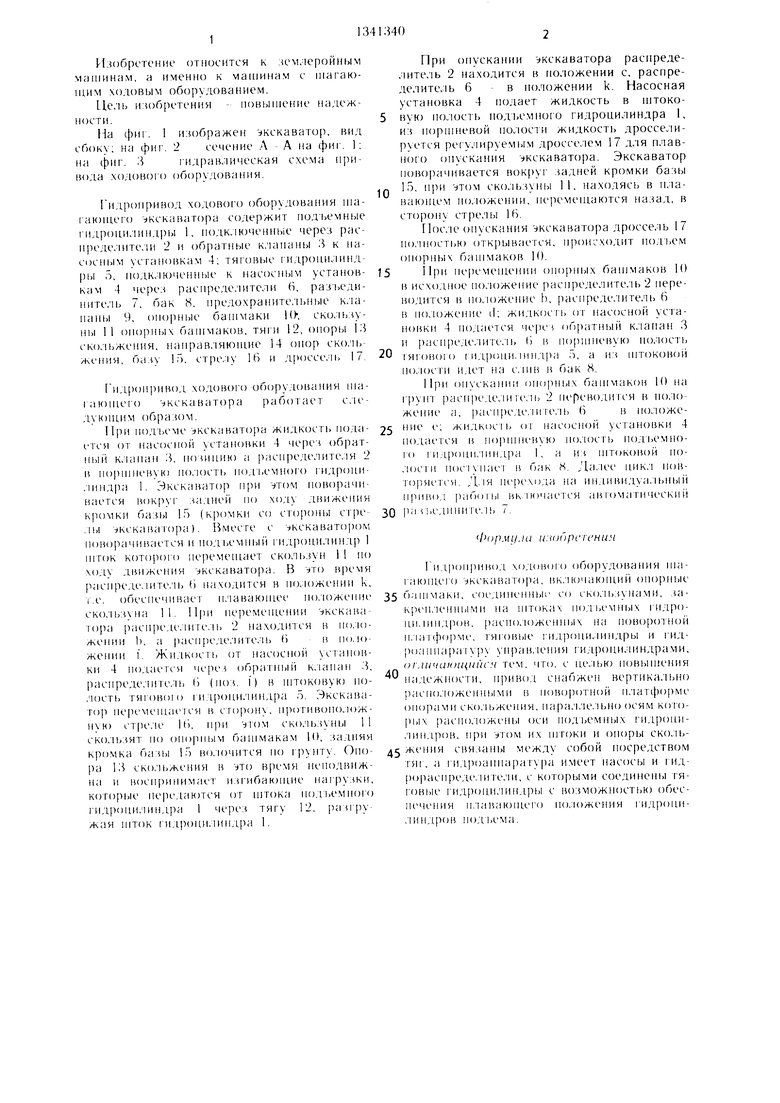
| название | год | авторы | номер документа |
|---|---|---|---|
| Ходовое оборудование шагающего экскаватора | 1987 |
|
SU1470878A1 |
| Шагающее ходовое оборудование | 1987 |
|
SU1447999A1 |
| Шагающее ходовое оборудование | 1986 |
|
SU1342986A1 |
| Шагающее ходовое оборудование | 1986 |
|
SU1384692A1 |
| Гидропривод ходового оборудования шагающего экскаватора | 1985 |
|
SU1247478A1 |
| Гидропривод ходового оборудования шагающего экскаватора | 1984 |
|
SU1234541A1 |
| ШАГАЮЩЕЕ ХОДОВОЕ ОБОРУДОВАНИЕ | 1993 |
|
RU2034963C1 |
| Шагающее ходовое оборудование экскаватора | 1987 |
|
SU1434043A1 |
| Ходовое оборудование шагающего экскаватора | 1987 |
|
SU1467142A1 |
| Гидропривод шагающего ходового оборудования экскаватора | 1987 |
|
SU1460142A1 |
Изобретение относится к землеройным ма1иинам, а именно к машинам с шагающим .ходовым оборудованием. Цель изобретения - повышение надежности. Для этого привод имеет вертикально установленные в поворотной платформе опоры скольжения 13, параллельно осям которых расположены оси подъемных гидроцилиндров (ГЦ) 1. Штоки ГЦ 1 и опоры скольжения 13 связаны между собой посредством тяг 12. С возможностью обеспечения плавающего положения ГЦ 1 тяговые ГЦ 5 соединены с насосами и гидрораспределителями. При перемещении экскаватора скользуны 11 скользят по опорным башмакам 10 и задняя кромка базы 15 волочится по грунту. Через тягу 12 опора скольжения 13 воспринимает нагрузку от ГЦ 1 и разгружает его П1ТОК. 3 ил. (Л со ОО 4 М///7 / ////1 /У / / // / Г2 //5 15 фиг. 1 /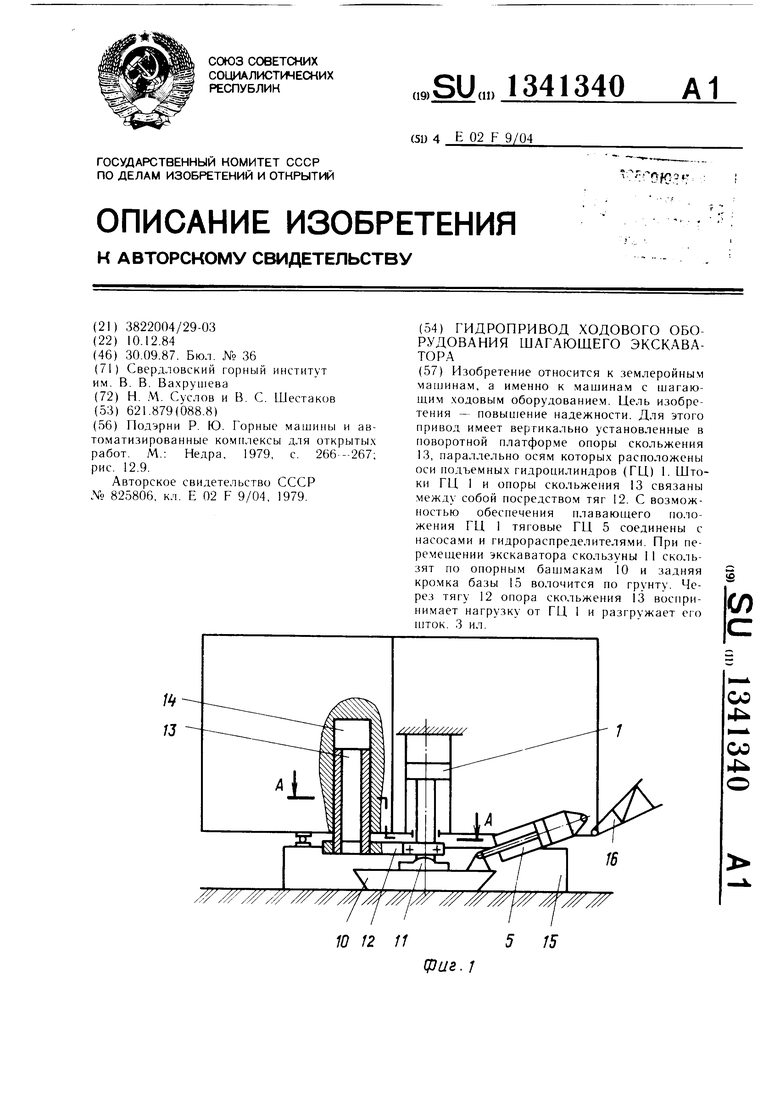
Фиг. J
| Подэрни Р | |||
| Ю | |||
| Гориые машииы и автоматизированные комплексы для открытых работ | |||
| М.: Недра, 1979, с | |||
| Способ нагрева эквипотенциального катода в электронных вакуумных реле | 1921 |
|
SU266A1 |
| Способ гальванического снятия позолоты с серебряных изделий без заметного изменения их формы | 1923 |
|
SU12A1 |
| Механизм шагания экскаватора | 1979 |
|
SU825806A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
