11
ИчиПрОТСМПИ ОТНОС .ИТГЛ к Ч;111|ИИ(11 1)оглп11() и продилипачсно для (ipur-inH р(1пяиио 1 поштучной подлчи стержне г мх ;к-г.1:г1М1 г буртом п нспрерыпио диижу- Ииися приемник, например трачспор - ii-.ii i ротор .
Целью изобретения япляется повышение ироизводите;п1ности устройства ча счет повышения быстродействия от- сегсателе при выдаче деталей п прием ник ро |-орного типа.
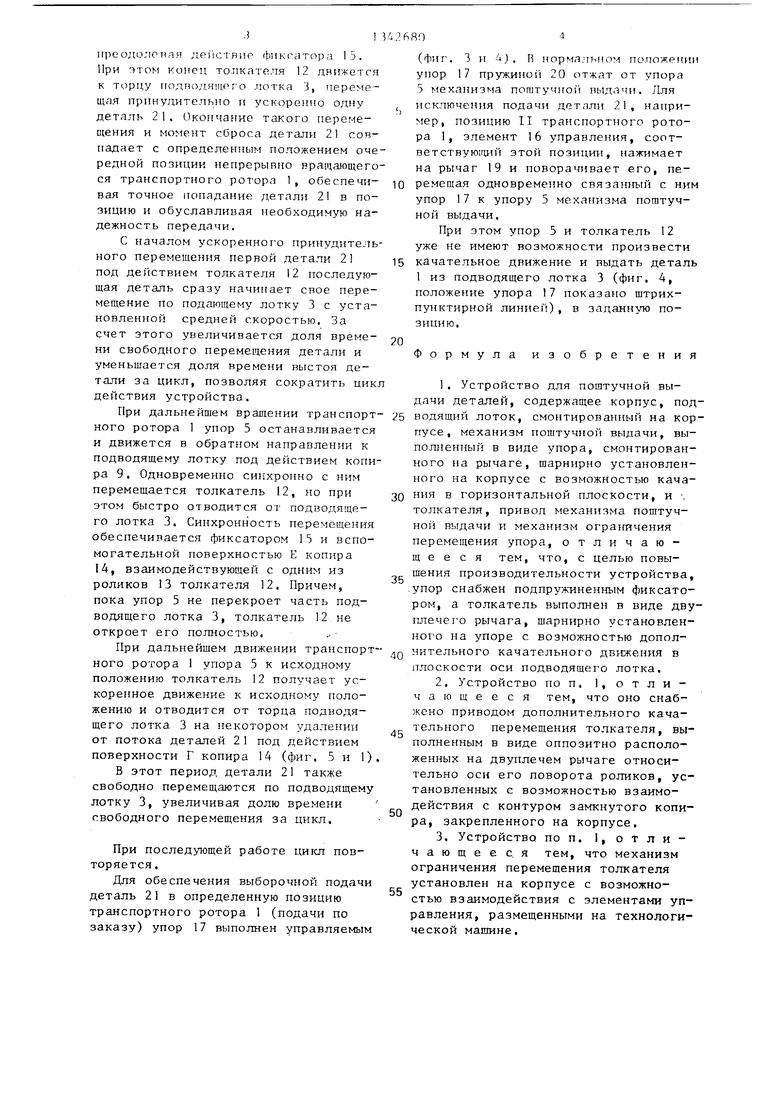
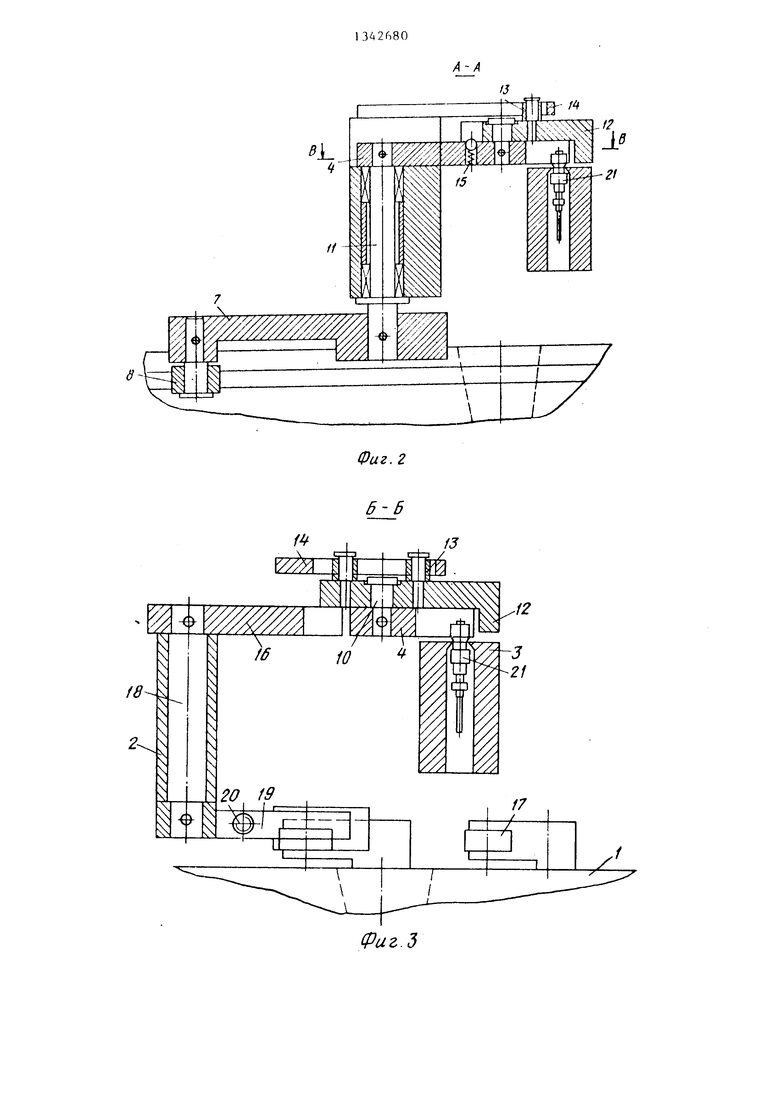
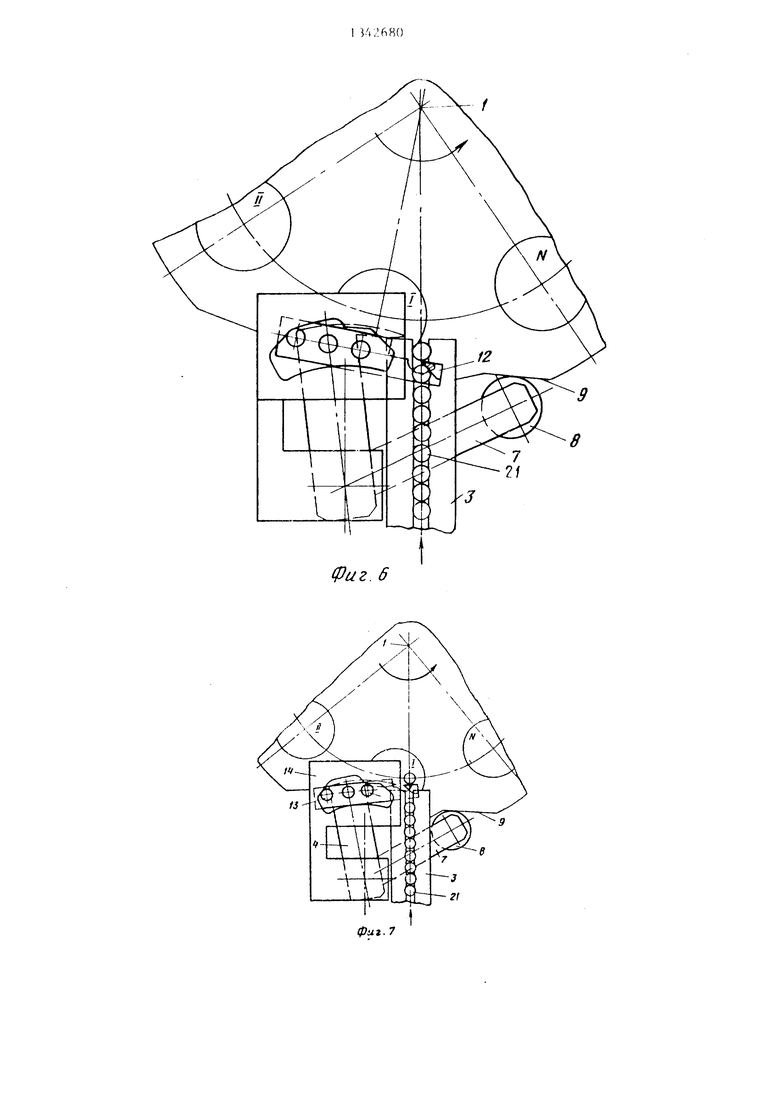
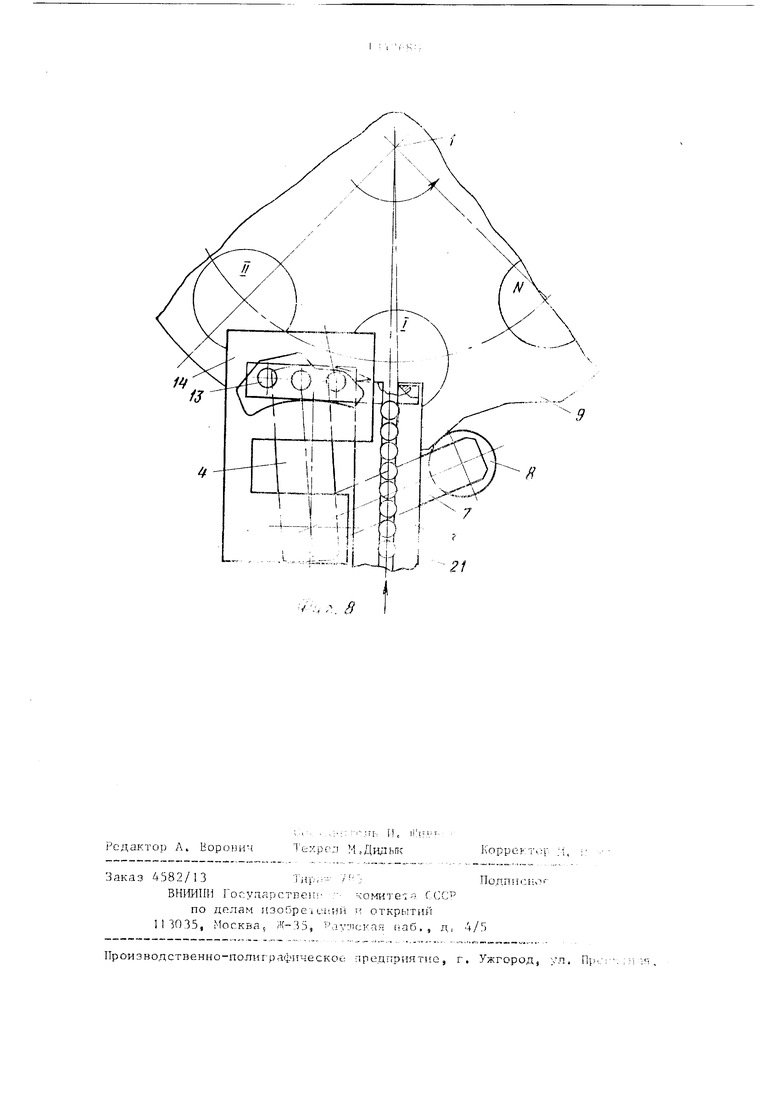
На . I схематично изображено устро1 гтяо для поштучной выдачи дета j cif, обпип вид; на фиг. 2 - Л.-Л на Фиг . 1 ; на фиг, 3 - разркз Б-Б на фиг, 1; на фиг, 4 - разрез В-В на фиг, 2; на фиг, 5-8 - nocjTe- довательные положения, занимаемые упором и толкателем при поштучной выдаче деталей п непрерывно движу- 1;01Йся приемник,
УстрО11Ство для поштучной выдачи деталей в позиции тшпрерывно движу- 1де1 ося питателя, папример трансиорт- чог о ротора 1 , содержит корпус 2 , на Ki TopoM закреплен подводящш лоток i, Fia корпусе 2 шарпирно смонтирован рычаг 4 с возможностью качания в iо- ризонтальной плоскости. На рычаге закреплен упор 5. Один конец рычага поджат к корпусу 2 пружиной 6, другой жестко связан с рычагом 7, ролик 8 которог о взаимодействует с кулачком 9 транспортного ротора 1, сооб- гил ацетч упору 5 качатсльиое. дпижепие На упоре 5 шарпирно па оси 10, сме- ;Ь ииой ОТ ОСИ I 1 качаиия упора Ь, vfvcanoB. ieH толкатель, вьп1олпенн1 1) в iu ru диуч.печего рычат а 12 и сппбжр.н- ачи приводом его перемецения, При -этом VI--ззачпый прт род перемр-чгмп 5Т Hbiiui:i)ii 1 и виде оппозитио располо- : еииых на двуплечем рычаге 12 относи гп:1ьпо iUapuHpHoii оси 10 ротшков 13,, контактирую1дих с замкнутым копиром . , iTi .пцлрппим па корпусе. На копире содержатся рабочие Г и Д вспомо- :. Г1-ribHi.if F и л поверхпости, вмпол- пс ппыс по радиусу с центром оси. В iсчр упора S расположен подпружииен- 1 1 ,})П1 сатор IS толкателя 12. На i . pnyce 2 устаноялгп механизм огра- :|1;чг;11ич ;i ЛремciiieHия упора мех 1низма 1 0 1;тучпо1 выдачи, управляем.1Й от ; р..исл1о;) i HOF o ротора элементами 16 у;1равл(: нпя , устаповленш гми па каж;1ой тптзиции грапспортного ротора 1. I, LI и N - позиции транспортного ро
42fi802
Tcipa I. Me;; а ИИ Ч пгрлпгп пп ( и-мс - иепия упора чо; аиичма iKririviiioi пм- дачи п.го. 1мен и идс уи М -ч 1 , :- 1поnjieiiifoi o г ,п;жн(, Ы1 чзаимо- де11стиия с -)лгч(М1 а - И -::раи.;Т( . Упор 17 закреплен на оси 18 и расположен на уровне упора S, а С 1язап- ШзП с ним рычат- 19 с пружиноГ 20,
1Q также закрепленный на оси 18, расположен на уровне элементов управления 17 (фиг, 4), установленных у каждой позиции транспортного ра 1 ,
15VcTpoi icTBO для 1то1чтучно1 | в|.1дачи
деталей работает следуюпщм образом.
По подающему лотку 3 детали 21, имеющие форму стержней с буртом, с необходимой средней скоростью переме- ;)1| 1цаи1тся в зону выдачи к торцу лотка (фгг, 5), В исходном положении упор 5 механизма гтоштучпой выдачи, взаимодействуя через рычаг 7 и ролик 8 с кулачком 9, полност1-.ю перекрывает
71) подводящий лоток 3, а толкатель 12 отве;хен от Торца подводя1це1 о лотка 3
и потока деталей
поверхностью Г
5
К(знира 14 в KpaiiHee положе ше.
При ира цеиии транспортного рото
0 ра 1 упор 5 и толкатель 12 механизма поиггучно выдачи паходятся некоторое время в неподвижном состоя- tniH (происходит их высотой), За зто время под торец подводящет о лотка 3 подходит очередная позиция транспорт ного ротора 1, а очередная деталь 21 подходит к упору 5,
Ilpi; ;дальпей1 1ег-1 црашении ч рашмгор г- ного ротора 1 (фиг. 6) упор 5 под
де11ствисм пружипы 6 и кулачка 9 поворачивается и отводится от по/дводя- liiero лотка 3 к ;иггали 21, а толка- Tcjn.i 12, г овор;1чиваясь с ним сипхрон- но, подходит к потоку деталей 21 и . oTceF a( T o;.uiy , 1гг, аль, CnnxpojniocTb перемещошя (поворота) толкателя 2 обоспеч1П .ается ()икс:атором 15 и вспо- ог ателыю 1 поверхностью Ж копира 14. ограи1 чнва101дими i eper-jeuienTie этог с двуплечего рычага 2 от}юсительно упора 5 под деГп Гпием иперпио}П ых сил.
Далее (: рчг-, 7) упор 5 продо.Илает отводиться от п, /плодящего лотка 3 5 пружиной 6 и ку::-.чком 9, а толгсатель 12 под деГ С | вием поверхности Д копира 14 получает дополпительно кача- тельпое перемещение относительно оси К) в 1 оризоптал1 пой плоскости.
0
11реодо;1от(ля леГютвие фиксатора 15. При этом конец толкателя 12 движется к торцу г одподя цего лотка 3, перемещая принудительно и ускорентю одну деталь 21. Окончание такого перемещения и момент сброса детали 21 совпадает с определенным положением очередной позиции непрерывно вращающегося транспортного ротора 1, обеспечивая точное попадание детали 21 в позицию и обуславливая необходимую надежность передачи.
С началом ускоренного принудительного перемещения первой детали 21 под действием толкателя 12 последующая деталь сразу начинает свое перемещение по подающему лотку 3 с установленной средней скоростью. За счет этого увеличивается доля времени свободного перемещения детали и уменьшается доля времени выстоя детали за цикл, позволяя сократить цик действия устройства.
При дальнейшем вращении транспортного ротора 1 упор 5 останавливается и движется в обратном направлении к подводящему лотку под действием копира 9, Одновременно синхронно с ним перемещается толкатель 12, но при этом быстро отводится от подводящего лотка 3, Синхронность перемещения обеспечивается фиксатором IS и вспомогательной поверхностью Е копира 14, взаимодействующей с одним из роликов 13 толкателя 12. Причем, пока упор 5 не перекроет часть подводящего лотка 3, толкатель 12 не откроет его полностью.
При дальнейщем движении транспортного ротора 1 упора 5 к исходному положению толкатель 12 получает ускоренное движение к исходному положению и отводится от торца подводящего лотка 3 на некотором удалении от потока деталей 21 под действием поверхности Г копира 14 (фиг, 5 и 1)
В этот период детали 21 также свободно перемещаются по подводящему лотку 3, увеличивая долю времени свободного перемещения за цикл.
При последующей работе цикл повторяется .
Для обеспечения выборочной подачи деталь 21 в определенную позицию транспортного ротора 1 (подачи по заказу) упор 17 выполнен управляемым
(фиг. 3 и А). В нормальном положении упор 17 пружине 20 отжат от упора 5 механизма поштучно выдачи. Для
исключения подачи детали 21, напри
мер, позицию II транспортного ротора 1, элемент 16 управления, соот- ветствуюиа1Й этой позиции, нажимает на рычаг 19 и поворачивает его, перемещая одновременно связан}гый с ним упор 17 к упору 5 механизма погатуч- ной выдачи.
При этом упор 5 и толкатель 12 уже не имеют возможности произвести
качательное движение и выдать деталь 1 из подводящего лотка 3 (фиг. 4, положение упора 17 показано щтрих- пунктирной линией), в заданную позицию.
Формула изобретения
1 . Устройство для поштучной выдачи деталей, содержащее корпус, подводящий лоток, смонтированньи на корпусе, механизм поштучной выдачи, выполненный в виде упора, смонтированного на рычаге, шарнирно установленного на корпусе с возможностью качания в горизонтальной плоскости, и . толкателя, привод механизма поштучной выдачи и механизм огра1гячения перемещения упора, отличающееся тем, что, с целью повы- щения производительности устройства, .упор снабжен подпружиненным фиксатором, а толкатель выполнен в виде двуплечего рычага, щарнирно установленного на упоре с возможностью дополнительного качательного движения в плоскости оси подводящего лотка.
2.Устройство по п. 1, о т л и - чающееся тем, что оно снабжено приводом дополнительного качательного перемещения толкателя, выполненным в виде оппозитно расположенных на двуплечем рычаге относительно оси его поворота роликов, установленных с возможностью взаимодействия с контуром замкнутого копира, закрепленного на корпусе.
3.Устройство по п. I, о т л и - чающее с. я тем, что механизм ограничения перемещения толкателя установлен на корпусе с возможностью взаимодействия с элементами управления, размещенными на технологической машине.
8
Фиг. г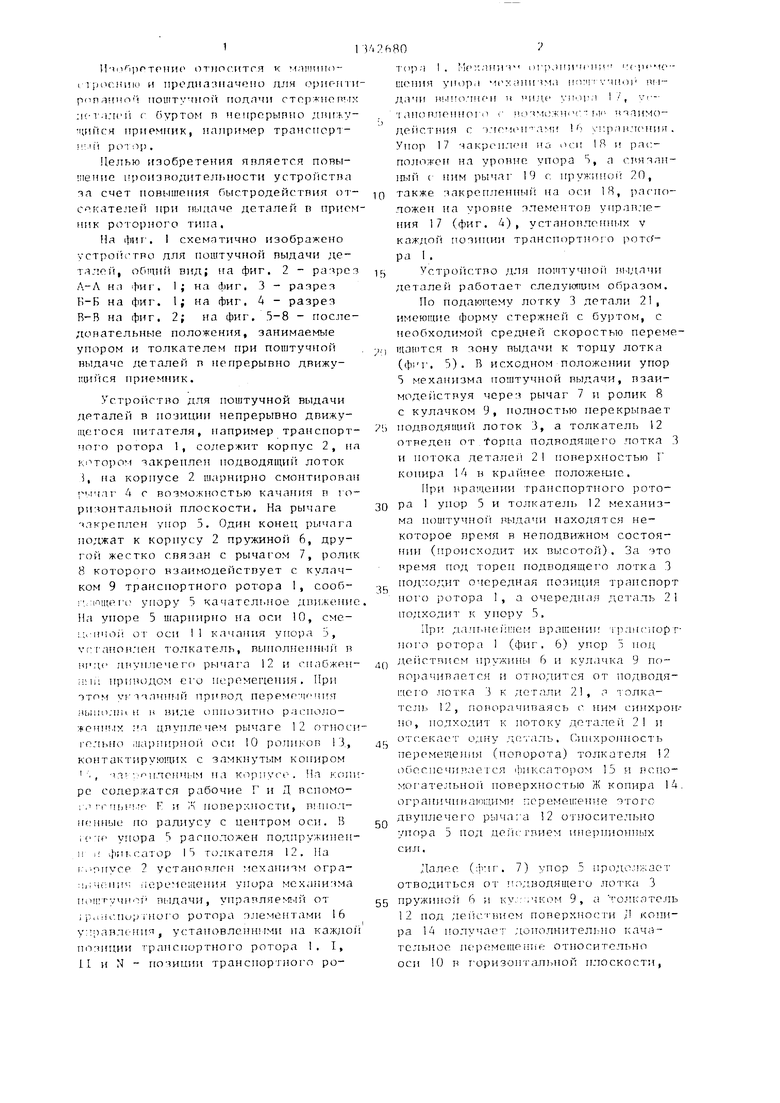
| название | год | авторы | номер документа |
|---|---|---|---|
| Роторный питатель | 1983 |
|
SU1079402A1 |
| Устройство для поштучной выдачи деталей из сплошного потока | 1980 |
|
SU921776A1 |
| Загрузочный ротор | 1989 |
|
SU1705010A1 |
| Роторный автомат питания | 1985 |
|
SU1250440A1 |
| Устройство для подачи деталей | 1983 |
|
SU1152098A1 |
| Загрузочное устройство | 1982 |
|
SU1089874A1 |
| Загрузочное устройство | 1984 |
|
SU1333531A1 |
| Роторный автомат питания | 1987 |
|
SU1562102A1 |
| Загрузочный ротор | 1988 |
|
SU1604555A1 |
| Загрузочно-разгрузочное устройство | 1990 |
|
SU1705013A1 |
Изобретение относится к области машиностроения и предназначено для ориентированной поштучной подачи стержневых деталей с буртом в непрерывно ДВИЖУ1ЦИЙСЯ транспортный ротор. Целью изобретения является повышение производительности устройства, Для этого механизм поштучной выдачи выполнен в виде смонтированного на корпусе 2 с возможностью качания в горизонтальной плоскости ts 19 упора 5 и толкателя, закрепленного шарнирно на упоре 5 с возможностью совершать дополнительное качательное перемещение вдоль оси подводящего лотка 3, закрепленного на корпусе 2. Дополнительное движение толкатель получает посредством закрепленных на толкателе оппозитно относительно оси его поворота роликов 13, установленных с возможностью взаимодействия с замкнутым копиром 14, закрепленным на корпусе 2. Для синхронного перемещения упора 5 и толкателя ла упоре 5 смонтирован подпружиненный фиксатор. На корпусе 2 установлен механизм ограничения перемещения механизма поштучной выдачи, выполненный в виде упора 17, установленного с возможностью взаимодействия с элементами управления 16, смонтированными на транспортном роторе 1 у каждой его позиции. 2 з.п. ф-лы, 8 ил. (Л -Й/П
Фиг.д
в
Фиг. 5
8
Фиг. 6
фиг.7
, Т
J 2f
;
7
V v, Л
;., . , ,;:: И 114 Редактор А. ВороннчТехрел М.Двдьк
Заказ 4582/13Titp,r,v
ВНШИН Госупарстпеи у- ломите7 т С.СС
по делам 1 зо5ре 1 еаин и открытий 113П35, Москва, Ж-35, 1 ау:пская ааб,, д, 4/5
Производственно-полиграфическое гфедпрмятне, г. Ужгсфод, ул. ПрКоррер; - : : М, :;
ITonrnicHot
| Устройство для ориентации деталей | 1976 |
|
SU571362A1 |
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
| Планшайба для точной расточки лекал и выработок | 1922 |
|
SU1976A1 |
