НзоГфетение относится к робототехнике, а именно к самодвижущимся роботам, и может быть использовано при разработке систем управления движением промышленных, транспортных и складских роботов,а также опорных кранов-штабелеров и кранов-манипуляторов .
Цель изобретения - повышение ско- рости позиционирования за счет улучшения динамических характеристик устройства.
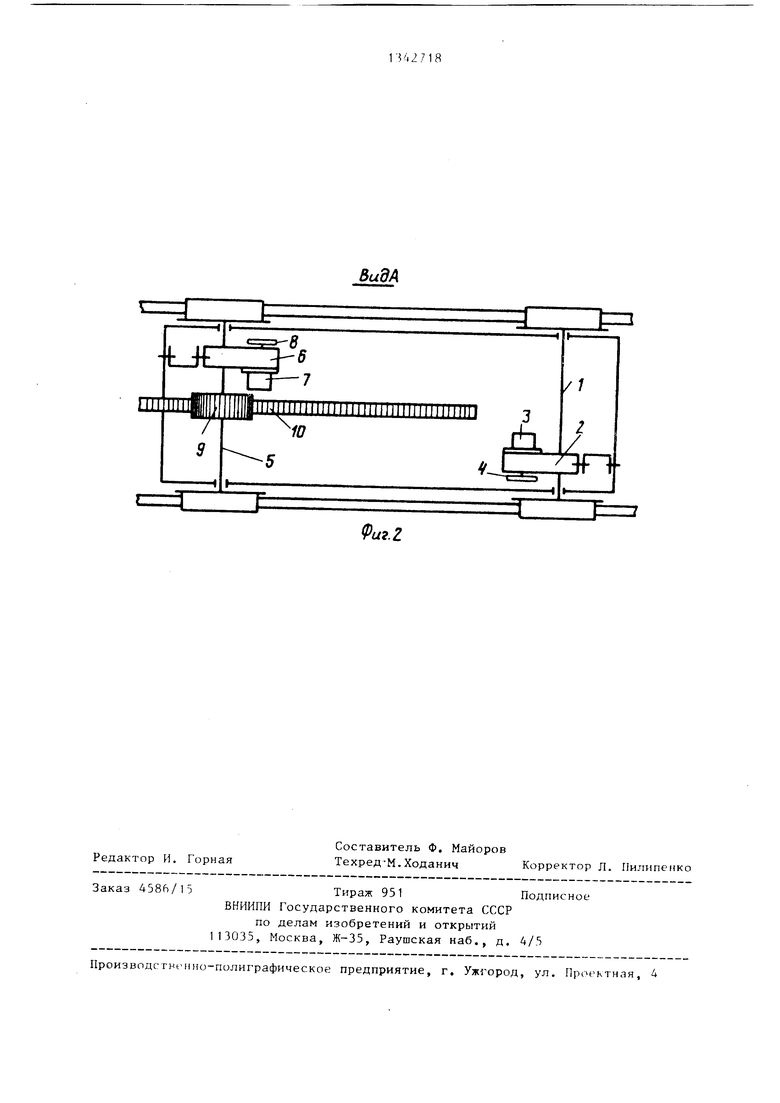
На фиг. 1 изображено предлагаемое устройство, общий вид; на фиг. 2 - вид А на фиг. 1.
Одна из двух ведущих осей 1 устройства связана с основным приводом, содержащим несамотормозящийся редуктор 2, асинхронный электродвигатель 3 с фазным ротором и электромагнитный тормоз 4. Привод обеспечивает маршевую скорость стационарного движения робота по трассе между обслуживаемыми объектами, а другая ось 5 связана с дополнительным приводом, содержащим несамотормозящийся редуктор 6, асинхронный электродвигатель 7 с фазным ротором и электромагнитный тормоз 8. На ведущей оси 5, реализующей скорость дотягивания (т.е. ползучую скорость), установлена шестерня 9, которая взаимодействует с зубчатой рейкой 10, смонтированной на всем участке позиционирования. Дл обеспечения плавного захода шестерни 9 на рейку 10 последняя по концам выполнена со скосом по высоте зубьев С целью получения высокой точности позиционирования зубчато-реечное зацепление выполнено мелкомодульным, т.е. с модулем 0,1-1,0 мм. При этом точность позиционирования составляет +0,3 - 3,0 мм соответственно.
Управление устройством осуществляется следующим образом.
Движение робота на трассе происходит с помощью основного привода. На участке, предшествующем точке позиционирования, основной привод от- ключают, например, при помощи бесконтактного путевого датчика индук - ционного типа и включают дополнительный привод дотягивания встречно основному приводу, уточнение положе- кия робота на участке позиционирования осуществляют посредством обеспечения кинематической связи механизма передвижения с трассой при помощи
t
0
5
0 5
мелкомодульного зубчато-реечног о зацепления, отслеживая положение робота на трассе путем отсчета шагов зацепления. В заданной точке позиционирования привод дотягивания отключают, а положение робота фиксируют входящим во впадину рейки 10 зубом шестерни 9 (зубчатого колеса).
Отсчет шагов зацепления осуществляют при помощи бесконтактного датчика перемещений, например фотоимпульсного, работающего на просвет зубьев зацепления. Точность позиционирования при этом рав)1а шагу зацепления. Формула изобретения
1.Устройство для позиционирования промышленного робота, содержащее основной привод перемещения робота по рельсам и механизм определения положения и фиксации робота, отличающееся тем, что, с целью повышения скорости позиционирования за счет улучшения динамических характеристик, оно снабжено дополнительным приводом перемещения робота со средствами его реверсирования и датчиком скорости перемещения робота, выход которого соединен со средством ресерсирования дополнительного привода, а механизм определения положения и фиксации робота выполнен
в виде зубчато-реечной передачи, снабженной счетчиком числа зубьев, зубчатого колеса этой передачи, при этом рейка этой же передачи имеет скос в направлении перемещения робота, а зубчатое колесо передачи связано с дополнительным приводом.
2.Способ управления устройством для позиционирования промышленного робота, заключающийся в том, что скорость перемещения робота снижают до скорости дотягивания (до ползучей скорости), определяют его положение
и фиксируют, отличающийся тем, что, с целью повьш1ения скорости позиционирования за счет улучшения динамических характеристик, перед зоной позиционирования отключают основной привод и включают дополнительный привод встречно основному (в режиме противовключения) до тех пор, пока скорость робота не снижается до величины скорости дотягивания, после чего дополнительный привод реверсируют, а затем осуществляют позиционирование и фиксацию робота.
Редактор И. Горная
Заказ 4586/15
Тираж 951Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 13035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
Фиг.2
Составитель Ф. Майоров
Техред М.Ходанич Корректор Л. Пилипенко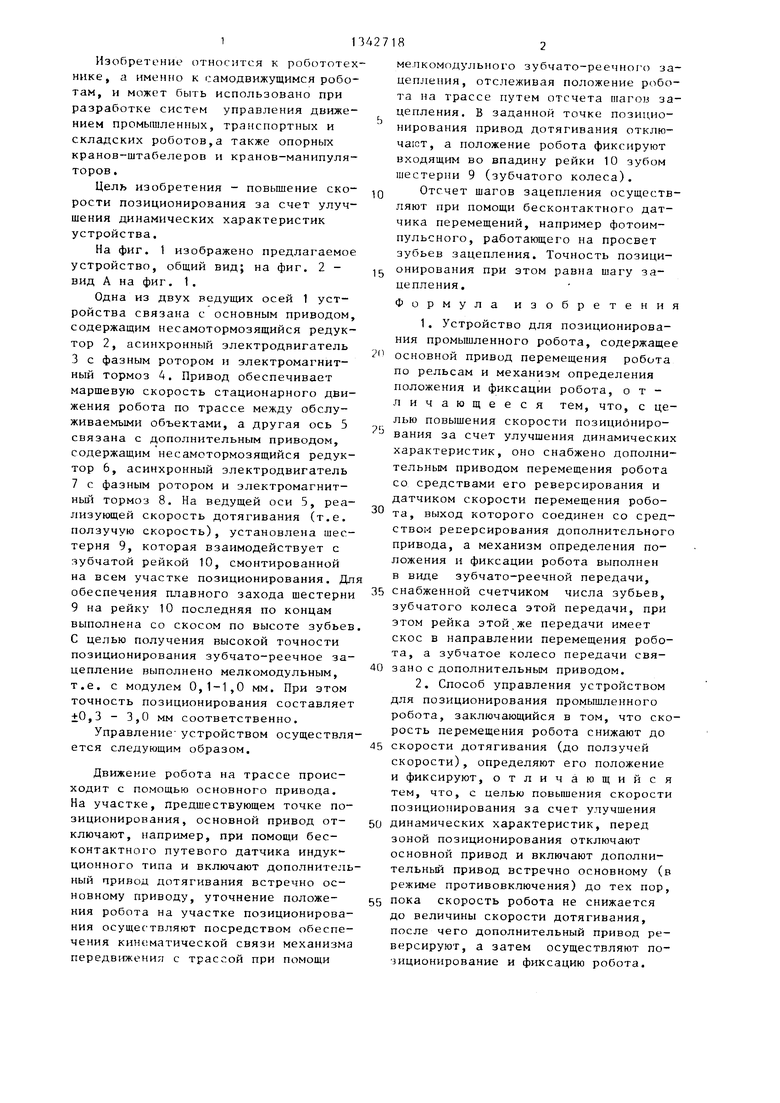
| название | год | авторы | номер документа |
|---|---|---|---|
| Подъемно-транспортная система | 1986 |
|
SU1418246A1 |
| Привод перемещения ходовой тележки стеллажного крана-штабелера | 1984 |
|
SU1194789A1 |
| Промышленный робот | 1987 |
|
SU1537514A1 |
| Переналаживаемая роботизированная система | 1981 |
|
SU998097A1 |
| Модуль промышленного робота | 1986 |
|
SU1335454A1 |
| Устройство для перегрузки пакетированных грузов | 1988 |
|
SU1643340A1 |
| КРАН-ШТАБЕЛЕР | 1968 |
|
SU221564A1 |
| Промышленный робот | 1981 |
|
SU1057267A1 |
| Промышленный робот | 1978 |
|
SU874328A1 |
| Устройство Баранова М.К. к станку для обработки конических зубчатых колес | 1989 |
|
SU1734571A3 |
Изобретение относится к робототехнике, а именно к самодвижущимся роботам, и может быть использовано при разработке систем управления движением промышленных, транспортных и складских роботов, а также опорных кранов-штабелеров и кранов-манипуляторов. Целью изобретения является повышение скорости позиционирования за счет улучшения динамических характеристик устройства. Перед участком позиционирования основной привод отключают, дополнительный привод дотягивания включают встречно основному приводу и оставляют включенным до момента, пока маршевая скорость снизится до величины скорости дотяги- ния, затем дополнительный привод реверсируют для движения в направлении ° точки позиционирования. Позиционирование осуществляют с применением мелкомодульного зубчато-реечного зацепления, рейку 10 которого монтируют на всем участке позиционирования, а взаимодействующую с ней шестерню 9 приводят в движение от дополнительного привода. Причем рейку 10 выполняют со скосом по высоте зубьев в направлении движения робота. 2 с.п. ф-лы, 2, ил. (Л 00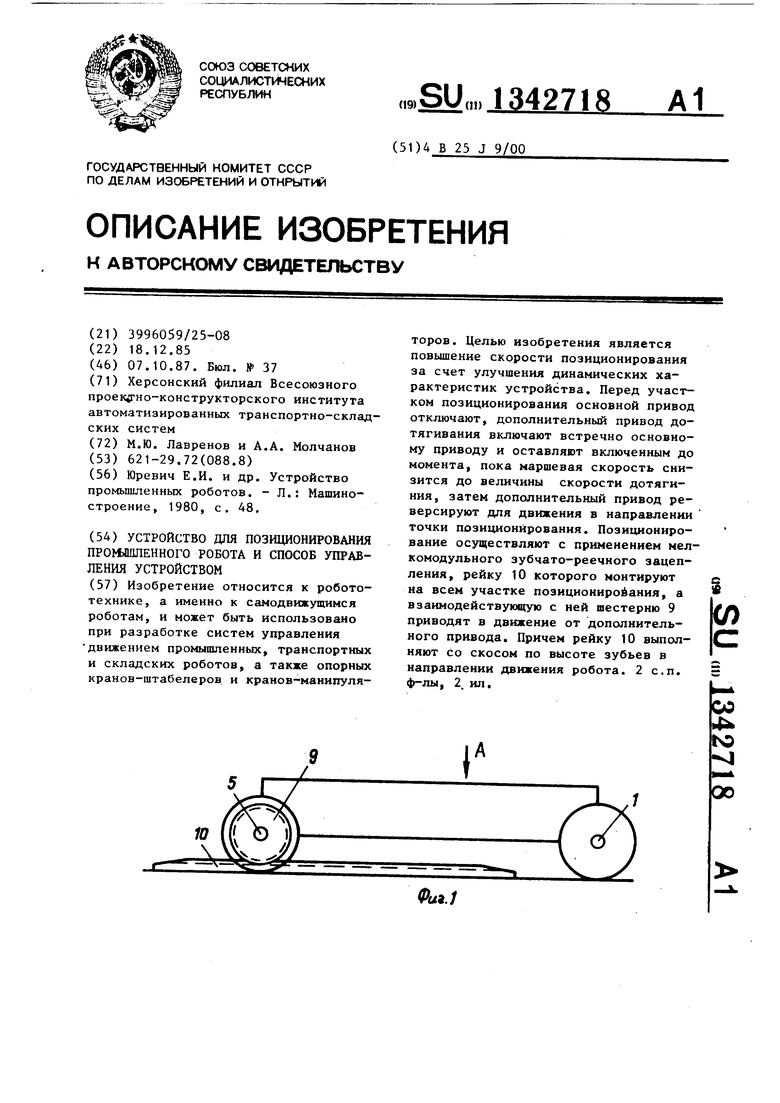
| Юревич Е.И | |||
| и др | |||
| Устройство промьшшенных роботов | |||
| -Л.: Машиностроение, 1980, с | |||
| Приспособление для автоматической односторонней разгрузки железнодорожных платформ | 1921 |
|
SU48A1 |
