3134
Изобретение относится к обработке еталлов давлением и может быть использовано для захвата и ориентации тучных заготовок в промышленных роботах, механических руках, листо- подавателе и т.д.
Целью изобретения является повыение надежности работы.
На фиг.1 изображен вакуумный захватный органj на фиг.2 - разрез А-А на фиг.1; на фиг.З - схема расположения фиксатора в корпусе.
Вакуумный захватный орган содерит корпус 1, закреппенный на подвижном крошчтейне 2, зубчатое кол есо 3, соединенное через спиральную пружину 4 с кронштейном 2, шестерню 5, входящую в зацепление с зубчатым ко.н есом 3, вал 6, установленный в кронштейне 2 с возможностью переме-; щения в вертикальном направлении и подпружиненный в этом направлении пружиной 7, упор 8, обгонную муфту 9, установленную в плоскости тестер-, ни 5, штуцер 10, иланг 11, соединяю-I щий канал 12, выполненный в корпусе Ijс источником вакуума (не показан), уплотнение 13, фиксатор 14, подпружиненный пружиной 15, взаимодействую- с заготовками 16.
Вал 6 является ходовым винтом, . имеющим;на нижней части несамотормо- зящую винтовую нарезку (канавку), входяш,ую во взаимодействие с ответной винтовой нарезкой выступом, выполненным в звездочке обгонной муфты 9. Корпусом обгонной ryфты: 9 являет- с я цилиндрическая поверхность плоскости, выполненной в шестерне 5. Взаимодействие звездочки с поверхностью 19 осуществляется через тела качения.
Упор 8 закреплен на основании. Уплотнение 13 и корпус 1 образуют вакуумный захватный орган (захват). Заготовки 16 имеют срезы, форма которых- может быть различной, т.е. заготовки могут быть различной конфигурации.. .
Вакуумный захватный орган работает следующим образом.
Корпус 1 кронштейна 2 перемещают и устанавливают над кассетой (не показана) с плоскими штучными заготовками 16. При перемещении корщ са 1 в направлении к кассете, т.е. вниз (фиг.1), вал 6 взаимодействует с упором 8 и перемещается вверх, сжи309 1
мая пружину 7. При этом вал через винтовую нарезку 17 (канавку ) приводит во вращательное движение звездочку, которая через тела качения вращает шестерню 5.
Находящееся в зацеплении с шестерней 5 колесо 3 вращается вместе с корпусом 1 и сжимает закрепленную
Q на, нем одним концом и на кронштейне 2 другим концом спиральную пружину 4. Через шланг 11, штуцер 10, подводящие каналы 12 в корпус 1 подается вакуум, который при контакте уплот5 нений 13 с заготовкой 16 создает усилие схвата. При подходе корпуса 1 с уплотнениями 13 к заготовке 16 перемещается также фиксатор 14. В случае несовпадения фиксатора 14 с
0 асимметричным элементом заготовки 16 фиксатор 14 торцом упирается в плоскость заготовки, сжимая пружину 15. . При обратном ходе кронштейна 2 с корпусом 1 вместе с притянутой к нему
5 заготовкой 16 спиральная пружина 14 поворачивает зубчатое колесо 3 и шестерню 5 в обратном направлении. При зтом обгонная Муфта 9 выходит из зацепления с цилиндрической поверх30 ностью полости шестерни 5 и вал 6 под действием пружины 7 перемещается относительно шестерни 5 в направлении упора 8, вращая туфту 9. Вращающиеся вместе заготовки 16 с фикса25 . тором 14 под действием пружин 15
перемещаются, и при упоре в боковую поверхность асимметричного элемента осуществляется фиксация от проворота заготовки 16 при определенном поло40 жении асимметричного элемента. Вращение корпуса 1 с заготовкой 16 при этом прекращается. При укладывании заготовки 16, например, в штамп (не показан) корпус 1 с заготовкой 16дг перемещаются до упора в плоскость
штампа. При этом фиксатор 14 упирается -тарсже в плоскость штампа и перемещается в направлении кронштейна 2, сжимая пружину 15 и продолжая фиксировать от проворота заготовку 16. При отключении вакуума и отходе корпуса 1 от заготовки 16 в случае; неполного освобождения от затяжки спиральной пружины 4 оставшимся усшгием затяжки колесо 3 и шестерня 5 поворачиваются до исходного положения.
Предложенный схват поя13оляет ориентировать круглые плоские заготовки, уложенные в кассеты, при наличии
50
55
асимметричных элементов как в центральных, так и на периферийных участках в определенных положениях;
Формула изобретения. 5
Вакуумный захватный орган, содержащий подвижный корпус, захват, смонтированный в корпусе с возможностью поворота, подпружиненный фиксатор, упор,« установленный на основании, механизм
I
поворота захвата, имеющий подпружиненный в направлении, перпендикулярном плоскости поворота захвата,вал с винтовой канавкой, узел преобразо- 15 вания, связывающий вал с захватом, отличающийся тем, что, с целью расширения технологических
возможностей путем обеспечения захвата и ориентирования асимг етрич1шх заготовок, подпружиненны фиксатор и вал смонтированы в корпусе параллельно продольной оси захвата, упор установлен с возможностью взаимодействия с валом, узел преобразования выполнен в виде зубчатого колеса, закрепленного на захвате и подпружиненного относительно корпуса стпфальной пру-, жиной возврата, шестерни, свободно установленной на валу с возможностью взаимодействия с зубчатым колесом, и оргонной муфты, закрепленной в шестерне и имеющей ответный винтовой выступ, входящий в винтовую канавку вала.
1011
I /
ifayV SBfl

| название | год | авторы | номер документа |
|---|---|---|---|
| Робот к листоштамповочному прессу | 1986 |
|
SU1465158A1 |
| Устройство для отделения листа от стопы и подачи его в рабочую зону пресса | 1979 |
|
SU871924A1 |
| Устройство для подачи длинномерного материала в рабочую зону обрабатывающей машины | 1980 |
|
SU919790A1 |
| Захватное устройство транспортного робота | 1987 |
|
SU1440705A1 |
| Автоматическая линия для изготовления деталей зонтичных каркасов из проволоки | 1983 |
|
SU1296271A1 |
| Манипулятор | 1985 |
|
SU1321577A1 |
| Устройство для отделения листа от стопы и подачи его в рабочую зону пресса | 1980 |
|
SU867481A1 |
| Станок для точения деревянных пробок | 1981 |
|
SU986784A1 |
| Устройство кривовязюков для вырубкизАгОТОВОК из пОлОСОВОгО илЕНТОчНОгО МАТЕРиАлА | 1979 |
|
SU804501A1 |
| Сменное захватное устройство | 1986 |
|
SU1404334A1 |
Изобретение относится к обработке металлов давлением, может быть использовано для захвата и ориента- ; дни деталей в промышленных ро ботах и. позволяет расширить технологические ВОЗМОЖНОСТИ Кронштейн 2 перемещает корпус (к ) 1 в зону захвата заготов-. ки. При пepeмeD eнии кронштейна 2 в ; нап 1авлении к кассете с заготовками ходрвЬй винт взаимодействует с неподвижным упором и перемещается вверх, сжимая пружину. При этом ходовой винт через муфту обгона вращает шестерню, которая через зубчатое колесо приводит во вращательное движение К 1 (захватный орган ) и закручивает спиральную пружину, связанную с К и зубчатым колесом. Осуществляется захват заготовки При неправильном расположении заготовки фиксатор взаимо-i действует с ней и удерживает заготовку в ориентированном положении. 3 ил, е СЛ ff IB Од 4ia в5 ОО СО V, «л, рие.2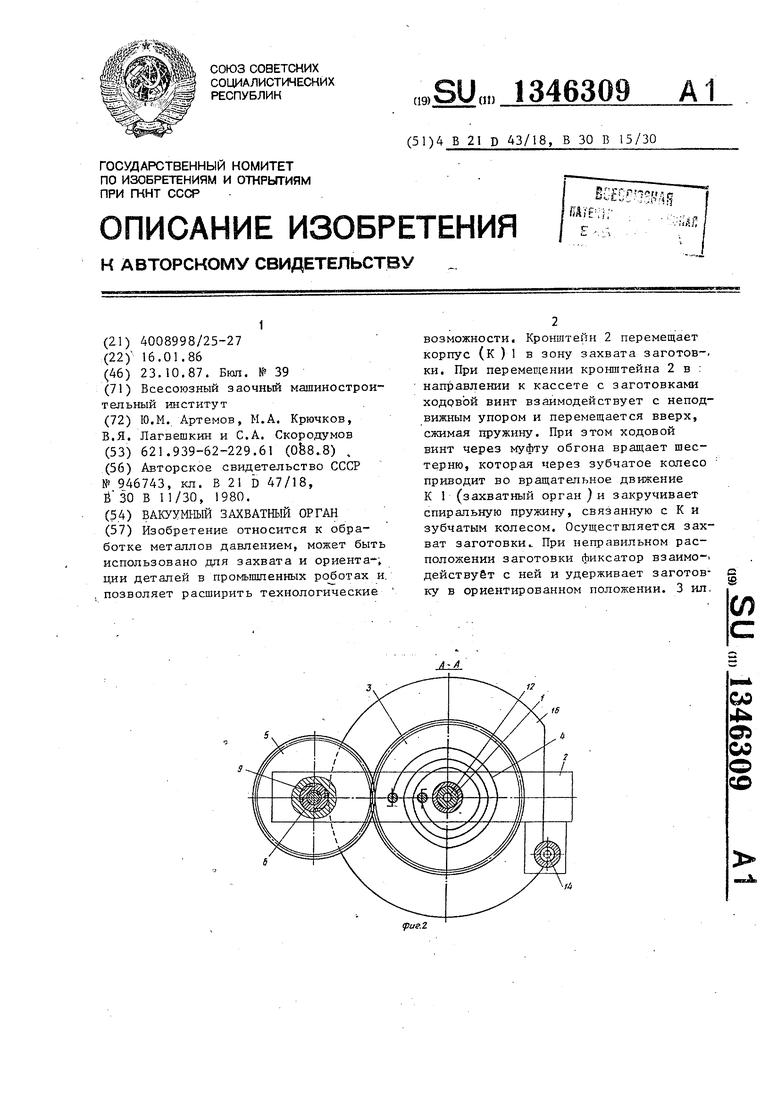
| Вакуумный захватный орган | 1980 |
|
SU946743A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
