(Л
ff
4 СО СО i4
/TV 7
Uв
Фи8,1
Ное устройство состоит из корпуса 1, в пазах боковых стенок 2 которого за фиксирован шток-поршень 3 пневмоци- .пиндра-рейки 4, входящей в зацепле йие с зубчатым колесом 5 двухзаходно- го винта 6. Винт 6 смонтирован на полке 8 корпуса 1, Работает устройст- Йо следующим образом. Робот, на ру- ke которого закреплен корпус 1, под- йодит устройство к заданному сменно-. My захватному органу, закрепленному на планке 12, размещенной в базируто- 4их элементах 13 держателя 14. В ис- з{одном положении пневмоцилиндр-рей04334
ка 4 выходит из зацепления с шестерней 5. При опускании руки винтовые поверхности конической части винта 6,набегая на сферические упоры, обеспечивают вращение винта до попадания упоров в спиральные канавки винта. Затем подается воздух в пневмо- цилиндр-рейку 4, которая, перемещаясь, входит в зацепление- с зубчатым колесом 5, вращая винт 6, и дожимает планку 12 к полке 8. Установка планки 12 вбазирующие элементы 13 производится в обратном порядке. 2 3.п. ф-лы, 4 ил.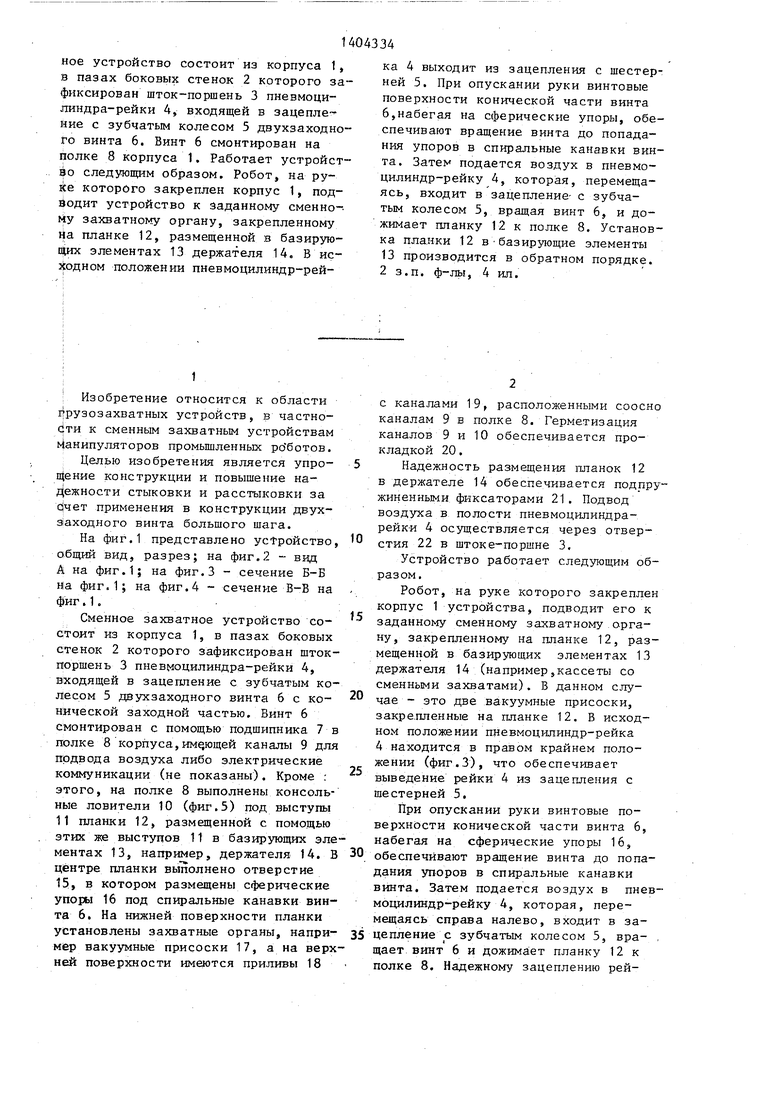
| название | год | авторы | номер документа |
|---|---|---|---|
| Автооператор для смены инструментальных наладок | 1986 |
|
SU1426744A1 |
| Автоматическое загрузочное устройство | 1984 |
|
SU1220783A1 |
| Транспортно-технологический ротор | 1988 |
|
SU1586795A1 |
| Устройство для изготовления гиперболоидных контактных узлов Карташева В.В. | 1987 |
|
SU1554058A1 |
| Захват промышленного робота | 1987 |
|
SU1509247A1 |
| Устройство для сборки газоплотных трубных панелей с коллекторами паровых котлов | 1988 |
|
SU1581547A1 |
| УСТРОЙСТВО для АВТОМАТИЧЕСКОЙ ПЕРЕДАЧИ ИНСТРУМЕНТА | 1973 |
|
SU375156A1 |
| Устройство для стыковки сменного инструмента с кистью промышленного робота | 1986 |
|
SU1463412A1 |
| Автоматическая линия для многопереходной штамповки | 1987 |
|
SU1565563A1 |
| Вакуумный захватный орган | 1986 |
|
SU1346309A1 |
Изобретение относится к грузозахватным устройствам, в частности к сменным захватным устройствам манипуляторов промьшленных роботов. Целью изобретения является упрощение конструкции и повьппение надежности стыковки и расстыковки за счет применения в конструкции двухзаходного . винта большого шага. Сменное .захват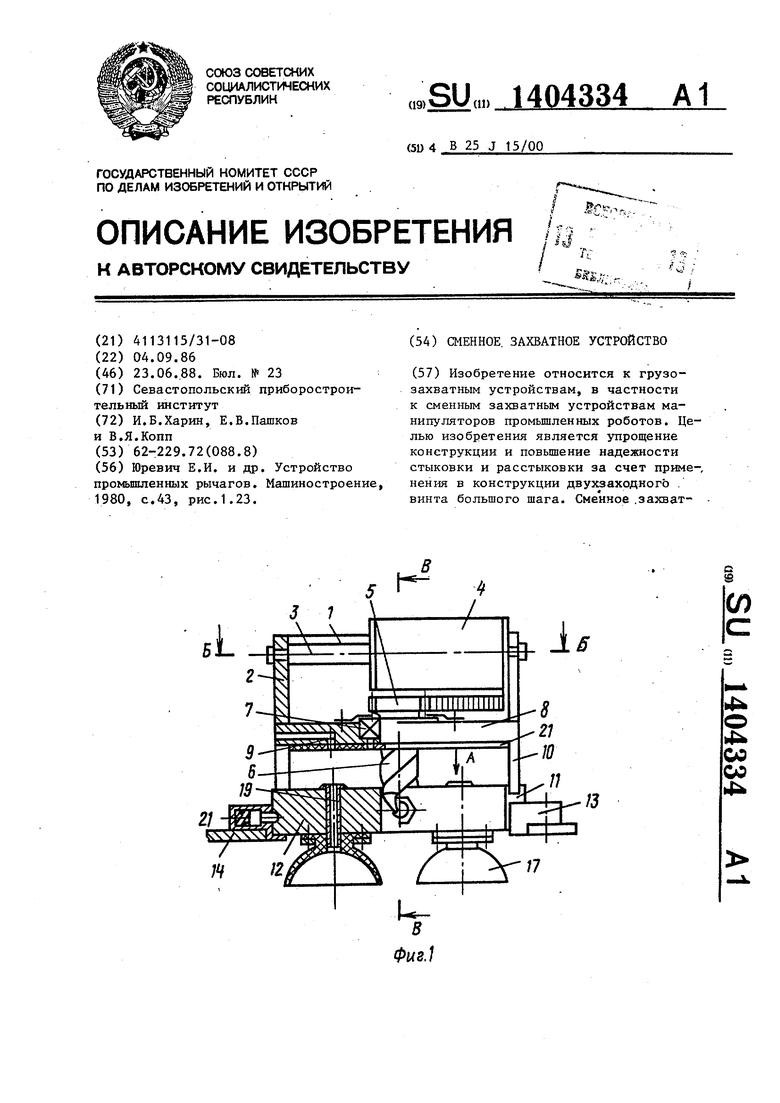
1
: Изобретение относится к области Грузозахватных устройств, в частно- 4ти к сменньт захватным устройствам Манипуляторов промьш1леннык ро ботов.
Целью изобретения является упро- 14ение конструкции и повышение на- Дежности стыковки и расстыковки за d4eT применения в конструкции двух- йаходного винта большого шага.
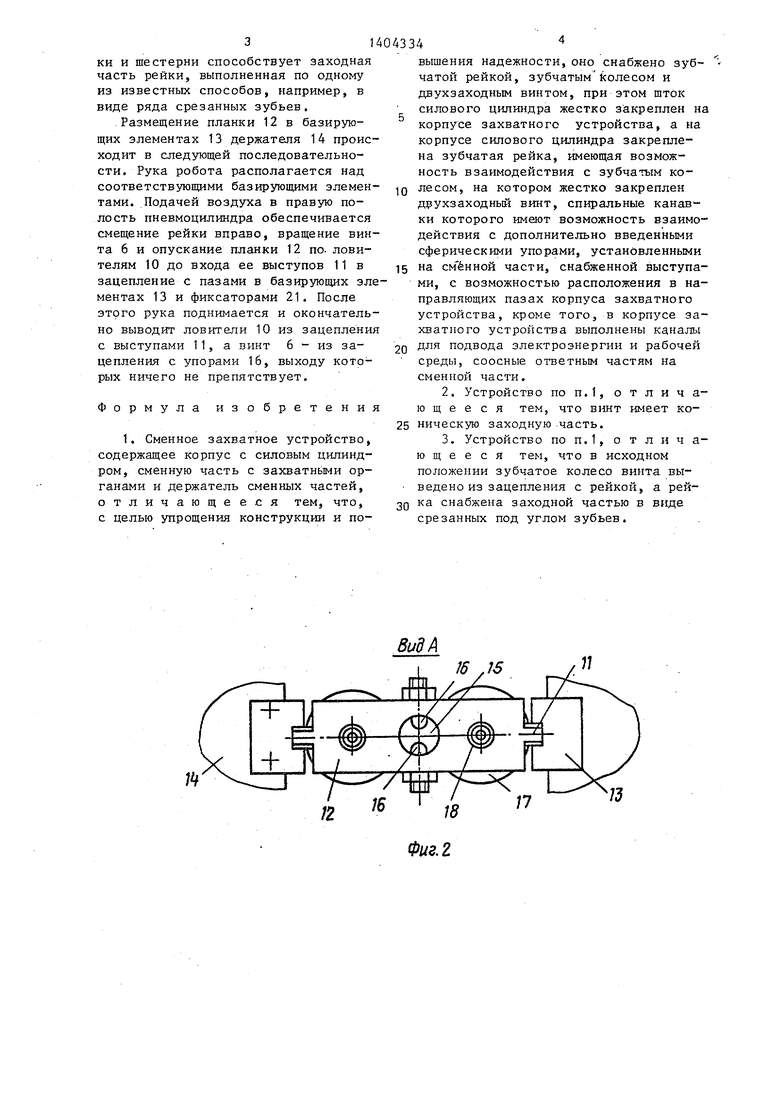
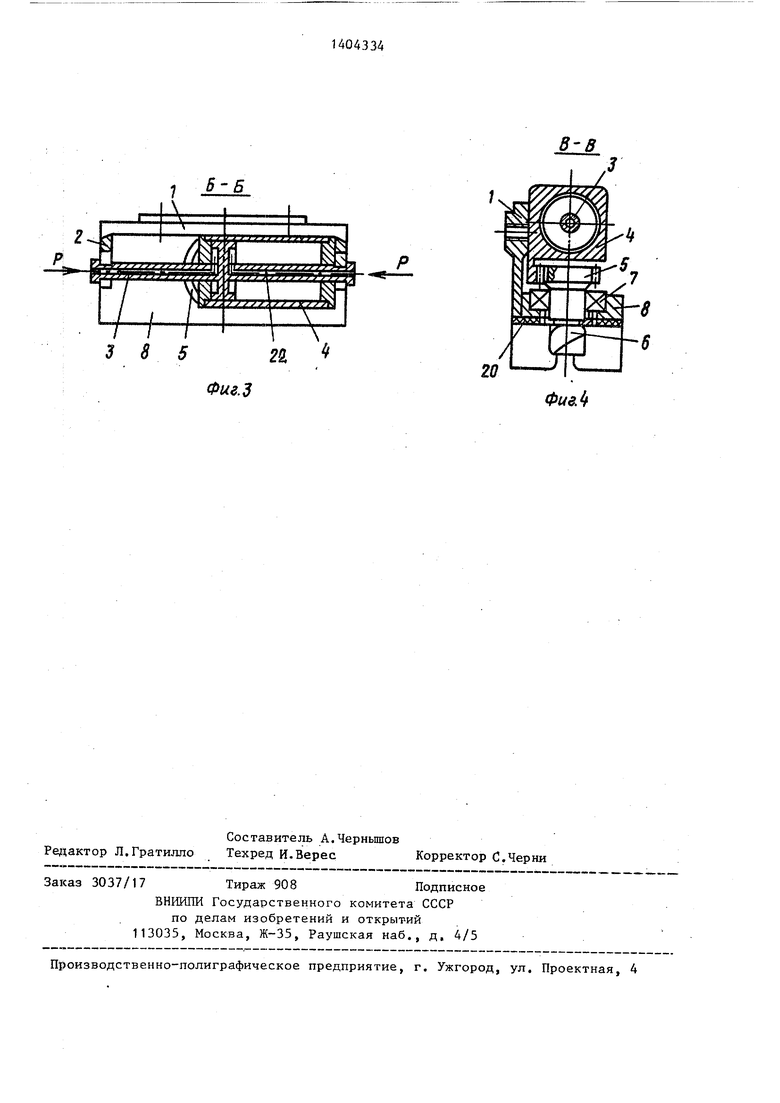
На фиг.1 представлено устройство, общий вид, разрез; на фиг.2 - вид А на фиг.1; на фиг.З - сечение Б-Б На фиг.1; на фиг.4 - сечение В-В на фиг.1.
Сменное захватное устройство состоит из корпуса 1, в пазах боковых стенок 2 которого зафиксирован шток- поршень 3 пневмоцилиндра-рейки 4, всходящей в зацепление с зубчатым ко- л1есом 5 двухзаходного винта 6 с конической заходной частью. Винт 6 смонтирован с помощью подшипника 7 в полке 8 корпуса,имеющей каналы 9 для подвода воздуха либо электрические коммуникации (не показаны). Кроме : этого, на полке В выполнены консольные ловители 10 (фиг.З) под выступы 11 планки 12, размещенной с помощью этих же выступов 11 в базирующих элементах 13, например, держателя 14. В центре планки выполнено отверстие 15, в котором размещены сферические упоры 16 под спиральные канавки винта 6. На нижней поверхности планки установлены захватные органы, например вакуумные присоски 17, а на верхней поверхности имеются приливы 18
с каналами 19 расположенными соосно каналам 9 в полке 8. Герметизация каналов 9 и 10 обеспечивается прокладкой 20.
Надежность размещения планок 12
в держателе 14 обеспечивается подпру- жиненньми фиксаторами 21. Подвод воздуха в полости пневмоцилиндра- рейк-и 4 осуществляется через отвер- стия 22 в штоке-поршне 3.
Устройство работает следующим образом.
Робот, на руке которого закреплен корпус 1 устройства, подводит его к заданному сменному захватному .органу, закрепленному на планке 12, размещенной в базирующих элементах 13 держателя 14 (например,кассеты со сменными захватами). В данном слу- 0 чае - это две вакуумные присоски, закре.пленные на планке 12. В исходном положении пневмоцилиндр-рейка 4 находится в правом крайнем положении (фиг.З), что обеспечкшает выведение рейки 4 из зацепления с шестерней 5,
При опускании руки винтовые по- верхн(эсти конической части винта 6, набегая на сферические упоры 16, 0 обеспечивают вращение винта до попадания упоров в спиральные канавки винта. Затем подается воздух в пнев- моцилиндр-рейку 4, которая, перемещаясь справа налево, входит в за- 5 цепление с зубчатым колесом 5, вра- , щает винт 6 и дожима ет планку 12 к полке 8. Надежному зацеплению рейки и шестерни способствует заходная часть рейки, выполненная по одному из известных способов, например, в виде ряда срезанных зубьев.
Размещение планки 12 в базирующих элементах 13 держателя 14 происходит в следующей последовательности. Рука робота располагается над соответствующими базирующими элементами. Подачей воздуха в правую полость пневмоцилиндра обеспечивается смещение рейки вправо, вращение винта 6 и опускание планки 12 по. ловителям 10 до входа ее выступов 11 в зацепление с пазами в базирующих элементах 13 и фиксаторами 21. После этого рука поднимается и окончательно выводит ловители 10 из зацепления с выступами 11, а винт 6 - из зацепления с упорами 16, выходу которых ничего не препятствует.
Формула изобретения
силового цилиндра жестко закреплен на корпусе захватного устройства, а на корпусе силового цилиндра закреплена зубчатая рейка, имеющая возможность взаимодействия с зубчатым колесом, на котором жестко закреплен друхзаходный винт, спиральные канавки которого имеют возможность взаимодействия с дополнительно введенными сферическими упорами, установленными
на см ённой части, снабженной выступами, с возможностью расположения в направляющих пазах корпуса захватного устройства, кроме того, в корпусе захватного устройства выполнены каналы
для подвода электроэнергии и рабочей среды, соосные ответным частям на сменной части.
ВидА
Фиг.2
385
Фие.д
В В
Фи&
| Юревич Е.И | |||
| и др | |||
| Устройство промьшшенных рычагов | |||
| Машиностроение, 1980, с.43, рис.1.23. |
