Изобретение относится к машиностроению, а 1шенно к манипуляторам и загрузочным устройствам для механи зации и автоматизации технологических процессов обработки деталей.
Цель изобретения - расширение технологических возможностей устройства путем обеспечения перемещения детали зажатой в захвате, в соответствии с технологическим процессом.
На фиг.1 изображено загрузочно- разгрузочное устройство; на фиг.2 - вид А на фиг.1,
Устройство содержит неподвижно закрепленный на руке 1 корпус 2 захватного устройства, в котором телескопически размещены верхняя губка 3, закрепленная на втулке, и нижняя губка 4, закрепленная на стержне. Губки замкнуты между собой пружиной 5. Пружина 6 обеспечивает установку губок в крайнем верхнем положении (исходное положение). Для раскрытия
губок служит выступ 7 на втулке, вза- 25 жение. Далее рука 1 перемещает Г
имодействующий с регулируемым упором 8, ввернутым в корпус. Выступ 9, расположенный на стержне нижней губки, при взаимодействии с зацепом 10, расположенным неподвижно и отдель- но -от руки, обеспечивает перемещение захватного устройства от привода, состоящего из двигателя 11 с редуктором, кулачка 12, рычагов 13 и 14, закрепленных на оси 15, зацепа 10 и мальтийского механизма, включающе го кривошип 16 и крест 17 и обеспечивающего шаговое перемещение цепей 18 и 19 конвейера с размещенными на них в специальных гнездах обрабатываемыми деталями.
Устройство работает следующим образом.
При перемещении руки 1 в положени для захвата деталей выступ 9 втулки нижней губки заходит в зону действия зацепа 10, включается двигатель 11, кулачок 12 через рычаг 13, закрепленный на оси 15, поворачивает рычаг 14 и опускает зацеп 10. При этом обе
губки 3 и 4, замкнутые пружиной 5, перемещаются вниз, сжимая пружину 6. Когда выступ 7 стержня верхней губки
касается упора 8 корпуса, верхняя губка останавливается, а нижняя продолжает опускаться (губки раскрываются) . Величина раскрытия губок регулируемая и определяется величиной
хода верхней губки ;;о упора 8. Перемещение захватного устройства прекращается, когда кулачок 12 взаимодействует с рычагом 13 большим радиусом. При дальнейшем вращении двигателя губки остаются раскрытыми, а кривошип 16 поворачивает мальтийский крест 17 на один щаг, при этом цепи перемещаются также на один шаг, подавая в раскрытые губки деталь, подвергаемую обработке. После этого рычаг 13 сходит с большего радиуса кулачка 12, зацеп 10 возвращается в верхнее положение, губки сжимают деталь и перемещаются в верхнее поло0
схват в зону обработки детали. Формула изобретения
Загрузочно-разгрузочное устройство, содержащее шаговый транспортер, механическую руку с захватным устройством, отличающееся тем, что, с целью расширения технологичес- ких возможностей, оно снабжено зацепом, кинематически связанным с приводом шагового транспортера, а захватное устройство выполнено в виде корпуса, в котором расположена с возможностью осевого перемещения втулка, снабженная выступом, в отверстии которой расположен стержень с выстут пом, причем стержень подпружинен относительно корпуса и втулки, выступЧ стержня расположен с возможностью взаимодействия с зацепом, а выступ втулки расположен с возможностью взаимодействия с дополнительно введенным упором, закрепленным на корпусе.
0
5
////////
Редактор А.Огар
Составитель А.Алексеев Техред Л.Олийнык
Заказ 5152/14Тираж 785Подписное
ВНИИПИ Государственного комитета СССР по делам изобретений и открытий 113035, Москва, Ж-35, Раушская.наб., д. 4/5
Производственно-полиграфическое предприятие, г.Ужгород, ул.Проектная,4
Корректор Л.Пилипенко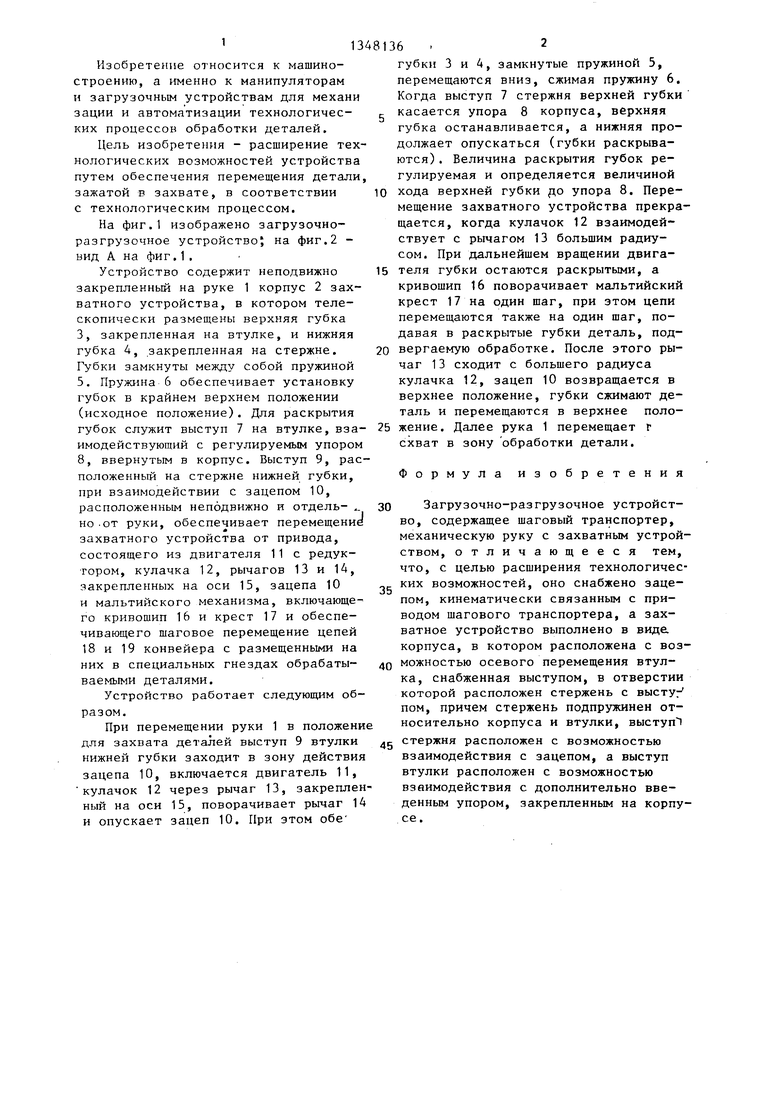
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ИЗГОТОВЛЕНИЯ СЛЮДЯНЫХ КОНДЕНСАТОРОВ | 1970 |
|
SU266957A1 |
| Промышленный робот | 1982 |
|
SU1125127A1 |
| Устройство для шаговой подачи стопы заготовок | 1984 |
|
SU1194544A1 |
| Манипулирующее устройство для съема, кантования и выдачи изделий с пресса | 1987 |
|
SU1512775A1 |
| Транспортно-технологический ротор | 1988 |
|
SU1586795A1 |
| Автооператор для смены инструментальных наладок | 1986 |
|
SU1426744A1 |
| Устройство для комплектования пакета дисковых заготовок с технологическими прокладками | 1977 |
|
SU738821A1 |
| Манипулятор | 1986 |
|
SU1371851A1 |
| Клепальный станок | 1975 |
|
SU526432A1 |
| ВЫСОКОЧАСТОТНЫЙ ЭЛЕКТРОХИРУРГИЧЕСКИЙ ИНСТРУМЕНТ ДЛЯ ЗАЖИМА И РАЗРЕЗАНИЯ ТКАНИ | 2022 |
|
RU2836562C2 |
Изобретение относится к машиностроению, а именно к манипуляторам и загрузочным устройствам для механизации и автоматизации технологических процессов обработки деталей. Целью изобретения является расширение технологических возможностей. При перемещении руки 1 в положение для захвата деталей выступ 9 втулки нижней губки входит в зону действия зацепа 10, включается двигатель, кулачок через рычаг поворачивает рычаг 14 и опускает зацеп. При этом обе губки перемещаются вниз, сжимая пружину 6. Выступ 7 стержня верхней губки касается упора 8, верхняя губка останавливается, а нижняя продолжает опускаться. Шаговый конвейер перемещается на один шаг, подавая в раскрытые губки деталь. После этого губки зажимают деталь и перемещаются в верхнее положение. 2 ил. (Л со 4ib 00 СО О5 фиг 2 V//
| 1971 |
|
SU419363A1 | |
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
