Изобретение относится к подъемно- транспортной технике, в частности к грузозахватным устройствам.
Цель изобретения - упрощение конструкции.
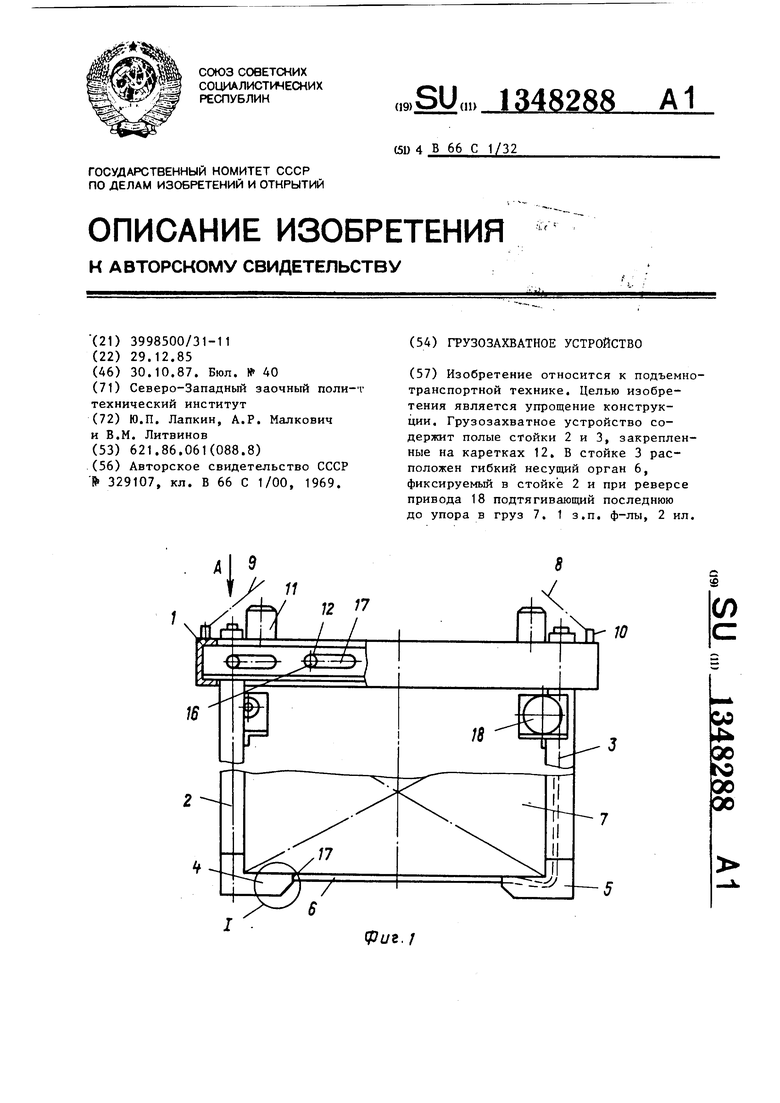
На фиг. 1 показано грузозахватное устройство, общий вид; на фиг. 2 - вид А на фиг. 1.
Грузозахватное устройство содержит ю вая сопротивление подпружиненной
прямоугольную раму 1, парные полые стойки 2 и 3 с лапами 4 и 5, между которыми зафиксированы металлические гибкие несущие органы 6 с размещенными
на них ( в качестве примера) разли«гны-15 жения привод 18 выдвижения гибкого ми по габаритам и форме грузами 7. Стропы 8 и 9 и петли 10 предназначены для навешивания устройства на крюк грузоподъемной машины. Каждая полая стойка 2, 3 кинематически связана 20 с соответствующим приводом 11 поворота и размещена на каретке 1.. Каждая пружина 13 одним концом закреплена за скобу прямоугольной рамы 1, а другим - за опорную косынку 14, уста- 25 новленную на каретке 12. Последняя смонтирована подвижно в опорах 15 прямоугольной рамы 1 с помощью катков 16, размещенных в пазах 17 опор 15. Гибкие несущие органы 6 связаны с верхними частями полых стоек 3. На противоположных поворотных полых стойках 2 в наконечнике лапы 4 смонтированы электромагнитные
несущего органа 6 отключается. Груз захватное устройство приподнимается груз 7 ложится на наконечники лап 4 и 5 и гибкий несущий орган 6. Пос этого груз 7 надежно зафиксирован в устройстве, так как обеспечен устой чивый контакт его с полыми стойками и гибкими несущими органами, и гото к транспортировке.
Формулз изобретени
1. Грузозахватное устройство, со жащее раму, закрепленные на ней с 30 возможностью перемещения в горизонтальной плоскости полые стойки, установленные внутри одних из стоек с возможностью возвратно-поступательного движения от привода и фиксируе
защелки 17. Привод 18 гибких несущих - мой связи одними своими концами со
свободными концами других стоек гибкие несущие органы и механизм передачи движения на полые стойки, о т л и чающееся тем, что, с целью
органов 6 закреплен на стойке 3.
Грузозахватное устройство работает, следующим образом.
Для захвата груза лапы 4 и 5 ориентируются по нему с помощью приводов д упрощения конструкции, стойки за- )1 поворота. Подпружиненные поперечные креплены на раме посредством горизон- каретки 12 установлены в максимально тально подпружиненных относительно ее раскрытом состоянии. Устройство опус- торцов кареток, при этом другие концы
гибких несущих органов связаны с верх- 45 ними частями первых полых стоек.
2. Устройство по п. 1, отличающееся тем, что несущие гибкие органы выполнены из сплава с эффектом памяти.
кают-На груз (или ряд грузов, установленных на загрузочном столе), лапы 4 и 5 разворачивают под груз, включают привод 18 выдвижения гибкого несущего органа 6, который с лапы 5 перемещается под грузом 7 до лапы 4.
Срабатьгаает электромагнитная защелка 17 и гибкий несу1дий орган 6 фиксируется. Привод 18 выдвижения гибкого несущего органа 6 тормозится и подается на реверс привода 18. При этом гибкий несущий орган 6, зафиксированный в лапе 4, тянет противоположную поворотную полую стойку 2, преодолекаретки 12 до величины заданного сближения с боковыми стенками груза 7.
После касания стенок груза 7 в за- т висимости от величины заданного сближения привод 18 выдвижения гибкого
несущего органа 6 отключается. Грузозахватное устройство приподнимается и груз 7 ложится на наконечники лап 4 и 5 и гибкий несущий орган 6. После этого груз 7 надежно зафиксирован в устройстве, так как обеспечен устойчивый контакт его с полыми стойками и гибкими несущими органами, и готов к транспортировке.
Формулз изобретения
жения привод 18 выдвижения гибкого
1. Грузозахватное устройство, содеращее раму, закрепленные на ней с возможностью перемещения в горизонтальной плоскости полые стойки, установленные внутри одних из стоек с возможностью возвратно-поступательного движения от привода и фиксируесвободными концами других стоек гибкие несущие органы и механизм передачи движения на полые стойки, о т л и чающееся тем, что, с целью
упрощения конструкции, стойки за- креплены на раме посредством горизон- тально подпружиненных относительно ее торцов кареток, при этом другие концы
иг.2
Редактор М. Петрова
Составитель Н. Нарышкина
Техред Л.Олийнык Корректор А. Обручар
Заказ 5162/21Тираж 720
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
1348288
Вид А
Подписное
| название | год | авторы | номер документа |
|---|---|---|---|
| Тележка - штабелер Калюжного В.В. | 1989 |
|
SU1676902A1 |
| Грузозахватное устройство | 1976 |
|
SU763233A1 |
| Автоматический захват | 1971 |
|
SU537020A1 |
| Устройство для хранения штучных грузов | 1990 |
|
SU1779654A1 |
| ТРАВЕРСА, МЕХАНИЗМ ВЫРАВНИВАНИЯ БАЛАНСИРОВКИ НЕСУЩЕЙ БАЛКИ ТРАВЕРСЫ, ТАКЕЛАЖНОЕ УСТРОЙСТВО НЕСУЩЕЙ БАЛКИ ТРАВЕРСЫ, ГРУЗОФИКСИРУЮЩЕЕ СРЕДСТВО ТАКЕЛАЖНОГО УСТРОЙСТВА НЕСУЩЕЙ БАЛКИ ТРАВЕРСЫ, ОПОРНЫЙ СТАПЕЛЬ НЕСУЩЕЙ БАЛКИ ТРАВЕРСЫ, СПОСОБ РАВНОВЕСНОЙ НАСТРОЙКИ ТРАВЕРСЫ НА ОПОРНЫХ СТАПЕЛЯХ, СПОСОБ ПЕРЕМЕЩЕНИЯ ТРАВЕРСОЙ ИЗДЕЛИЯ | 2008 |
|
RU2376237C1 |
| Захватное устройство для труб | 1980 |
|
SU952720A1 |
| Кран для погрузки и выгрузки элементов верхнего строения пути | 1977 |
|
SU737347A1 |
| Грузозахватное устройство | 1980 |
|
SU996319A1 |
| ТРАНСПОРТНОЕ СРЕДСТВО ДЛЯ ПЕРЕВОЗКИ ГРУЗОВВ ЕМКОСТЯХ | 1970 |
|
SU288732A1 |
| Вагон для пакетированных грузов | 1988 |
|
SU1684200A1 |

Изобретение относится к подъемно- транспортной технике. Целью изобретения является упрощение конструкции. Грузозахватное устройство содержит полые стойки 2 и 3, закрепленные на каретках 12. В стойке 3 расположен гибкий несущий орган 6, фиксируемый в стойке 2 и при реверсе привода 18 подтягивающий последнюю до упора в груз 7. 1 з,п. ф-лы, 2 ил. sV-10 (Л Vut.l