Изобретение относится к машино- .строению, а именно к захватным устройствам промышленных роботов и манипуляторов, и может быть использовано для одновременного перемещения двух детапей, подготовленных к сборке.
Целью изобретения является повы- ,шение надежности путем обеспечения поддержки захватываемых деталей при транспортировке.
На фиг. 1 изображено захватное устройство, общий ВИД на фиг. 2 - вид А на фиг. 1; на фиг. 3 - сечение Б-Б на фиг. 1; на фиг. 4 - вид В на фиг. 1; на фиг. 5 - сечение Г-Г на фиг о 2„
Захватное устройство содержит корпус 1, в цилиндрическом отверстии которого установлен уплотненный поршень 2 со штоком 3, соединенный с державкой 4. На корпусе 1 на осях 5 смонтированы поворотные рычаги 6,7 со сквозными пазами 8, расположенными под углом к оси перемещения штока 3. Рычаги 6 и 7 соединены с державкой 4 с помощью штифтов 9, пропущенных через пазы 8 и закрепленных на державке 4, На рычагах 6 и 7 закреплены зажимные губки 10 и 11, На корпусе 1 на осях 12 смонтирована поворотная планка 13, отжимаемая в сторону губок 10, 11 пружинами 14.
fO
Подачей сжатого воздуха в полость 19 поршень 2 со штоком 3 перемещается (на чертеже - вправо) и через элементы 4, 9 поворачивает рычаги 6, 7с губками 10, 11 на осях 5 в открытое положение. В таком положении устройство устанавливается на де тали 22, 23. предварительно подготовленные к транспортировке о Планка 13 в момент упора в деталь 23 прижимает ее к детали 22 и при дальнейшей транспортировке и установке деталей на рабочее место удерживает их от возможного смещения, В процессе пово 5 рота планки 13 на осях 12 упор 16 входит во взаимодействие с датчиком 17, который выдает сигнал о наличии детали 23, после чего полость 19 сое диняется с атмосферой. Подачей сжато го воздуха в полость 20 поршень 2 перемещается (на чертеже - влево) в рабочее положение, и губки 10, 11 за жимают деталь 22, Следующий цикл зажима и освобождения деталей 22, 23 осуществляется в аналогичной последо вательности.
20
25
30
Формула изобретения
Захватное устройство, содержащее корпус, зажимные губки, привод поворота губок;, например, в виде силового цилиндра и датчик наличия детали, отличающееся тем, что, с целью повьшшния надежности работы
Планка 13 снабжена стойкой 15 с упо 35 путем обеспечения поддержки захва- ром 16, взаимодействующим в рабочем тываемых деталей при транспортиров- положений с датчиком 17, смонтированным на кронштейне 18 корпуса 1. В отверстии корпуса 1 образованы рабочие
ке, оно снабжено подпружиненной
|плаНкой с упором, установленной на корпусе, при этом планка имеет воз
полости 19 и 20. Поршень 2 дополнительно отжимается в рабочее положение пружиной 21„
Захватное устройство работает следующим образом.
-
10
Подачей сжатого воздуха в полость 19 поршень 2 со штоком 3 перемещается (на чертеже - вправо) и через элементы 4, 9 поворачивает рычаги 6, 7с губками 10, 11 на осях 5 в открытое положение. В таком положении устройство устанавливается на детали 22, 23. предварительно подготовленные к транспортировке о Планка 13 в момент упора в деталь 23 прижимает ее к детали 22 и при дальнейшей транспортировке и установке деталей на рабочее место удерживает их от возможного смещения, В процессе пово- рота планки 13 на осях 12 упор 16 входит во взаимодействие с датчиком 17, который выдает сигнал о наличии детали 23, после чего полость 19 соединяется с атмосферой. Подачей сжатого воздуха в полость 20 поршень 2 перемещается (на чертеже - влево) в рабочее положение, и губки 10, 11 зажимают деталь 22, Следующий цикл зажима и освобождения деталей 22, 23 осуществляется в аналогичной последовательности.
Формула изобретения
Захватное устройство, содержащее корпус, зажимные губки, привод поворота губок;, например, в виде силово- го цилиндра и датчик наличия детали, отличающееся тем, что, с целью повьшшния надежности работы
путем обеспечения поддержки захва тываемых деталей при транспортиро
ке, оно снабжено подпружиненной
35 путем обеспечения поддержки захва- тываемых деталей при транспортиров- |плаНкой с упором, установленной на корпусе, при этом планка имеет воз
можность поворота и плоскости, перпендикулярной к плоскости перемещения зажимных губок, а упор планки - взаимодействия с датчиком наличия детали.
12 1 aff4 , /4 /
10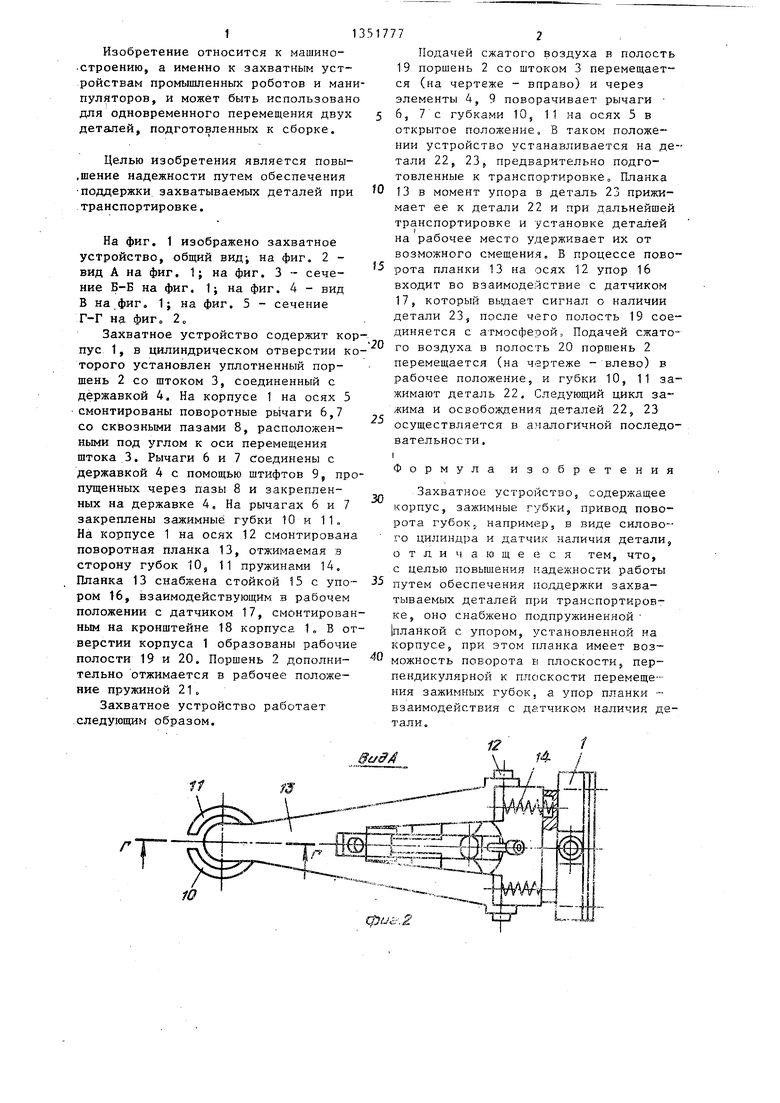
| название | год | авторы | номер документа |
|---|---|---|---|
| Схват манипулятора | 1986 |
|
SU1445951A1 |
| Захватное устройство | 1988 |
|
SU1632585A1 |
| Захватное устройство | 1985 |
|
SU1293021A1 |
| Захватное устройство | 1984 |
|
SU1288046A1 |
| Захватное устройство | 1985 |
|
SU1291393A1 |
| Захватное устройство | 1987 |
|
SU1445954A1 |
| Захват | 1986 |
|
SU1397280A1 |
| Захватное устройство | 1986 |
|
SU1355483A1 |
| Схват манипулятора | 1983 |
|
SU1202864A1 |
| Захватное устройство | 1987 |
|
SU1437218A2 |

Изобретение относится к области машиностроения, а более конкретнок захватным устройствам промышленных роботов и манипуляторов, и может быть использовано для одновременного перемещения двух деталей, подготовленных к сборке. Цель изобретения - повышение надежности путем обеспечения поддержки захватываемых деталей при транспортировке. На корпусе 1 смонтированы поворотные рычаги 6, 7с зажимными губками 10, 11 и поворотная планка 13, отжимаемая сторону губок 10, 11 пружинами 14. Рычаги 6, 7 соединены через державку 4 с поршнем силового цилиндра. Деталь на которую предварительно уложена вторая деталь, захватывается губками 10, 11, а первая деталь прижимается подпружиненной планкой 13. При наличии второй детали планка 13 отклоняется и упор 16 взаимодействует с датчиком 17 ,, сигнализирующим о наличии второй детали, что позволяет надежно транспортировать захватываемые детали. 5 ил. Q (Л со СП | ч 7 V V
Buffs
11
ЕП
Ю
(риёЛ
Г-Г
11
фиЗ .З
Редактор А.Маковская
.Составитель Б.Пышкин Техред Л.Олийнык
Заказ 5525/13Тираж 952Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
Корректор Л.Патай
| Схват промышленного робота | 1976 |
|
SU580114A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
