Изобретение относится к станкостроению, в частности к транспортным системам автоматических линий металлорежущих станков, и нредназначеио для перемещения деталей с разным шагом.
Цель изобретения - повыщение производительности работы конвейера за счет обеспечения возможности одновременного перемещения деталей на конвейере на разные шаги.
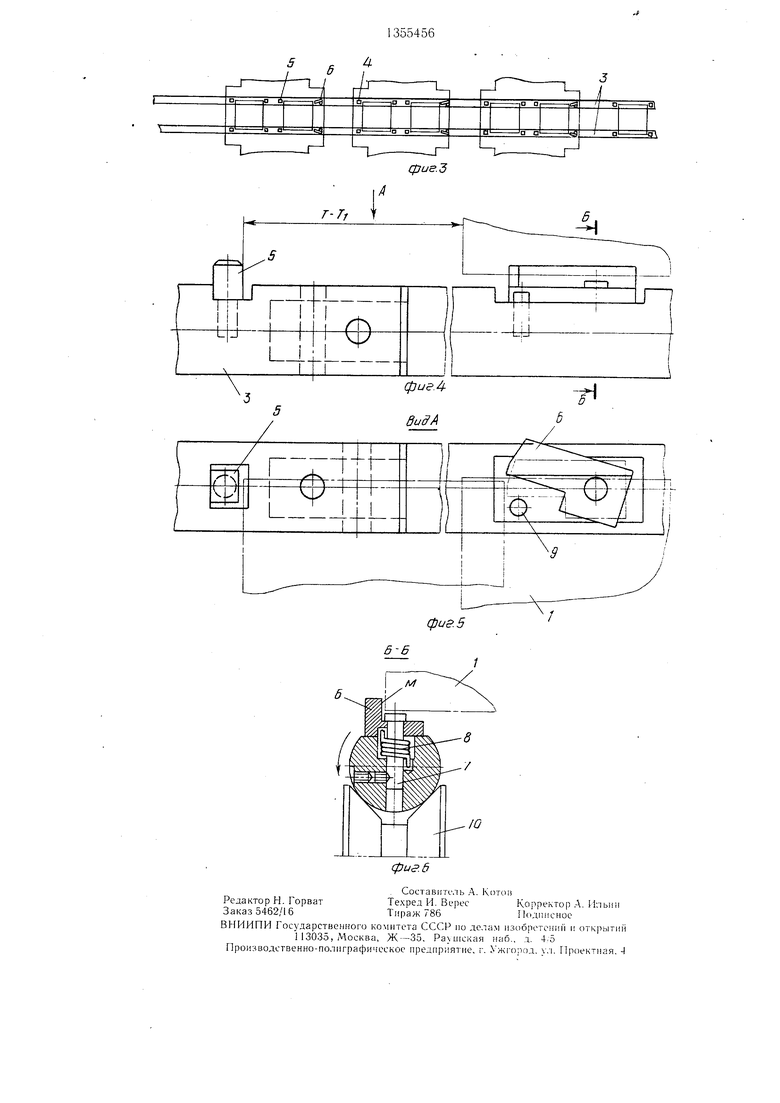
На фиг. 1 представлен конвейер в исходном пол.ожении; на фиг. 2 - конвейер при перемещении на меньший шаг (в промежу- точно.м положении в мо.мент захвата детали, перемещаемой на меньший inar), вид в плане; на фиг. 4 - щтанга конвейера; на фиг. 5 - вид А на фиг. 4; на фиг. 6 - сечение Б-Б на фиг. 4.
Конвейер служит для перемен1,ения спутников с деталя.ми 1 между позициями двух- пози ц ионных станков 2 на njar Т и между станками на шаг Т, больнаий щага Т, между пози1 1иями. Перемепдение осуществляется двумя штангами 3, на которых установлены две групны упоров, обеспечивающих пере10
15
20
повая собачка 6 упирается поверхностью М в боковую поверхность детали на II позицию и поворачивается таким образом, что при перемещении щтанг 3 собачка 6 проходит, не захватывая деталь на II позиции. При подходе упора 5 к торцу детали на II позиции транспортер замедляет ход, чтобы не произошел удар упора 5 о деталь. Упор 5 захватывает деталь на II позиции,собачка 6, не удерживаемая боковой поверхностью детали на II позиции, возвращается в рабочее ноложение, осуществляя таким образом обхват детали. Перемещение детали на II позиции осуществляется на щаг Т; , а детали на I позиции - на таг Т.
Формула изобретения
Конвейер автоматической линии, содержащий подвижную поворотную цтангу с двумя группами упоров, закрепленными на ней с возможностью перемещения деталей, первой группой - на больший щаг, а второй - на меньший, отличающийся тем, что, с целью повышения производительности, он снабжен установленной параллельно основмеп-1.ение на разный щаг. Перемещение де- 25 ой щтанге и кинематически с ней связанной
талей на больп1ий шаг Т. осуществляется двумя упорами 4, а на меньший njar T - унором 5 и храповой собачкой 6, установленными на штанге 3 со смещспие.м Tz Т - Т.). Последняя размещена на оси 7 в штанге 3 и связана с пружиной кручения 8 один конец которой закреплен в собачке 6, а другой в щтанге 3. В рабочем положении поворот собачки 6 ограничивается упором 9. Штанги 3 конвейера размещены нараллель- но друг другу в опорах 10 и связаны с приводом продольного перемещения (не показан), имеюп-1,его ход, равный величине большого HJara Т.
Устройство работает следуюн им образом.
При повороте штанг 3 на деталь 1 уно- ры 4 охватывают деталь на I позиции, xiia30
35
40
дополпительнои штангой с соответствующими гругшами упоров, а также размещенными на дополнительной и основной пЛангах дополнительными упорами и подпружиненными собачками, причем дополнительные упоры размещепы попарно с упорами первой группы с возможностью размещения деталей между упорами пары, а подпружиненные собачки установлены на осях, перпендикулярных осям штанг и расположенных попарно с упорами второй группы с возможностью размещения деталей между соответствую- щи.ми упорами второй группы и собачками, при этом основные и дополнительные упоры, а также оси поворота собачек расположены вдоль образующих штанг, а последние кинематически связаны с воз.можностью разнонаправленного поворота.
5
0
повая собачка 6 упирается поверхностью М в боковую поверхность детали на II позицию и поворачивается таким образом, что при перемещении щтанг 3 собачка 6 проходит, не захватывая деталь на II позиции. При подходе упора 5 к торцу детали на II позиции транспортер замедляет ход, чтобы не произошел удар упора 5 о деталь. Упор 5 захватывает деталь на II позиции,собачка 6, не удерживаемая боковой поверхностью детали на II позиции, возвращается в рабочее ноложение, осуществляя таким образом обхват детали. Перемещение детали на II позиции осуществляется на щаг Т; , а детали на I позиции - на таг Т.
Формула изобретения
Конвейер автоматической линии, содержащий подвижную поворотную цтангу с двумя группами упоров, закрепленными на ней с возможностью перемещения деталей, первой группой - на больший щаг, а второй - на меньший, отличающийся тем, что, с целью повышения производительности, он снабжен установленной параллельно основ
дополпительнои штангой с соответствующими гругшами упоров, а также размещенными на дополнительной и основной пЛангах дополнительными упорами и подпружиненными собачками, причем дополнительные упоры размещепы попарно с упорами первой группы с возможностью размещения деталей между упорами пары, а подпружиненные собачки установлены на осях, перпендикулярных осям штанг и расположенных попарно с упорами второй группы с возможностью размещения деталей между соответствую- щи.ми упорами второй группы и собачками, при этом основные и дополнительные упоры, а также оси поворота собачек расположены вдоль образующих штанг, а последние кинематически связаны с воз.можностью разнонаправленного поворота.
фие.2
r-Tj
rf
| название | год | авторы | номер документа |
|---|---|---|---|
| Конвейер | 1972 |
|
SU686949A1 |
| Конвейер автоматической линии | 1983 |
|
SU1093648A1 |
| ШТАНГОВЫЙ КОНВЕЙЕР ДЛЯ ПОТОЧНОГО ПЕРЕМЕЩЕНИЯ ЗАГОТОВОК К ОБРАБАТЫВАЮЩИМ СТАНКАМ | 1973 |
|
SU370130A1 |
| Шаговый конвейер | 1974 |
|
SU546532A1 |
| Шаговый конвейер для перемещения деталей | 1983 |
|
SU1122587A1 |
| Реверсивный конвейер | 1983 |
|
SU1159846A1 |
| Шаговый конвейер-накопитель | 1985 |
|
SU1247326A1 |
| Шаговый конвейер автоматической линии | 1982 |
|
SU1070087A1 |
| Штанговый конвейер | 1982 |
|
SU1121200A1 |
| Штанговый конвейер | 1978 |
|
SU763215A1 |
Изобретение относится к станкостроению, в частности к транспортным системам автоматических линий металлорежущих станков, и предназначено для перемещения деталей с разным шагом. Цель изобретения - повышение производительности работы конвейера за счет обеспечения возможности одновременного перемещения деталей на конвейере на разные шаги, для чего конвейер содержит две штанги 3 с поперечно установленными упорами 4, 5, причем упоры 5 установлены со смещением, равным разнице шагов, для обеспечения перемеиде- ния деталей на меньший щаг. 6 ил. фиг.1 со ел ел 4 СП 05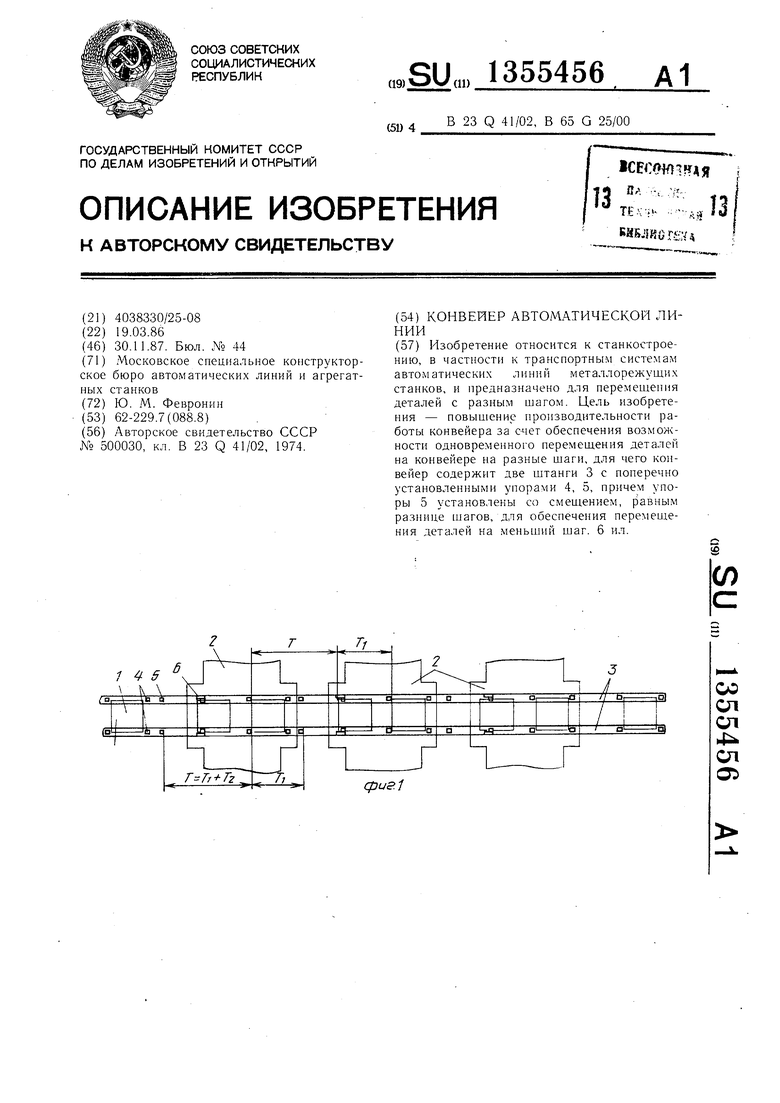
фив.5
10
фиг. 6
Составитель А. Котов
Редактор Н. ГорватТехред И. ВересКорректор А. Нпьии
Заказ 5462/16Тираж 786Подписное
ВНИИПИ Государственного комитета СССР по делам пзобретопш и открытий
1 13035, Москва, Ж-35, Рауп|ская наб., д. 4.5 Производственно-полиграфическое предприятие, г. Ужгород, ,, Проектная, -I
| Автоматическая линия для механической обработки | 1974 |
|
SU500030A1 |
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
