Изобретение относится к нодъемно-транс- портному оборудованию, а именно к штабе- лерам для обслуживания разновысотных полочных и каркасных стеллажей с переменным шагом ячеек но высоте.
Цель изобретения - улучшение эксплуатационных характеристик путем обеспечения непрерывного процесса вертикального перемещения.
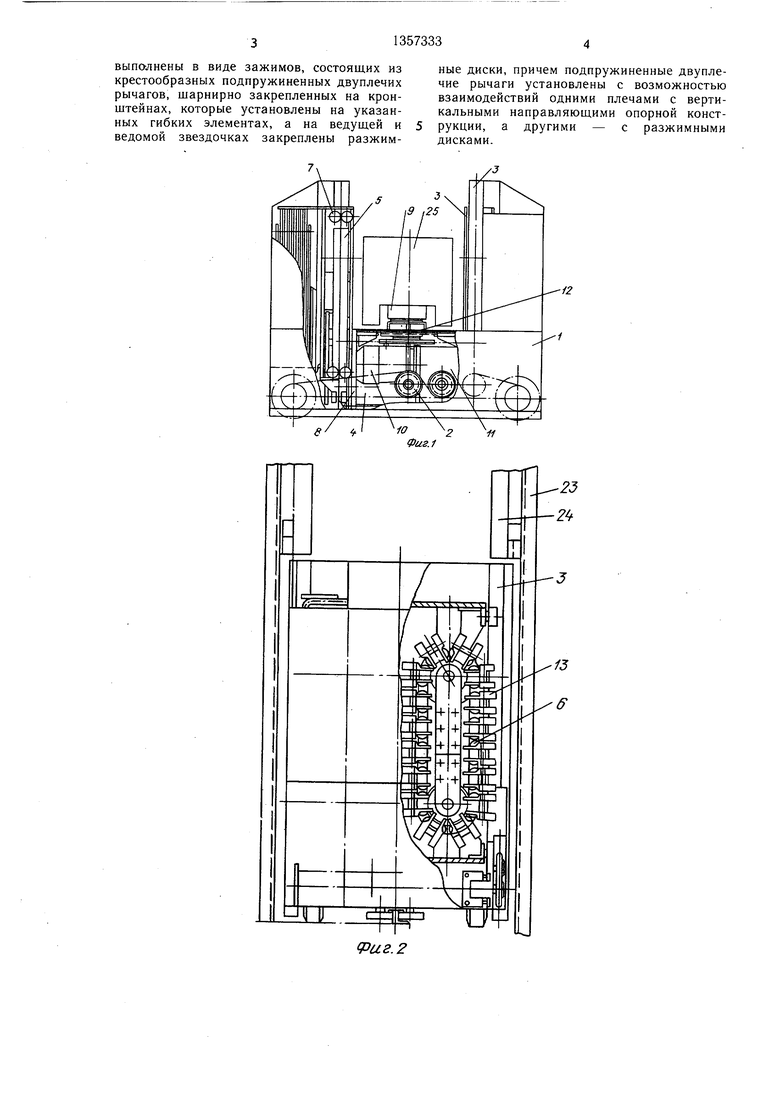
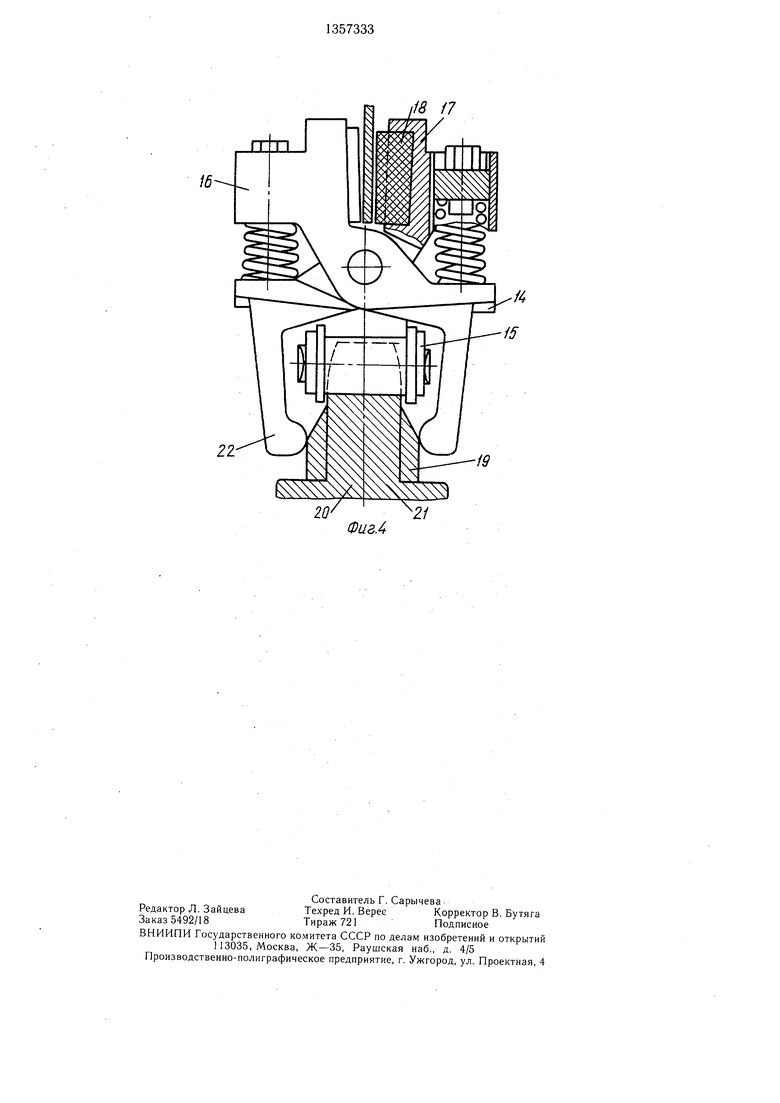
На фиг. 1 показан штабелер, общий вид; на фиг. 2 - то же, вид сбоку; на фиг. 3 - положение тележки и подъемника при взаимодействии подъемника с вертикальными направляющими стеллажа; на фиг. 4 - сечение по ведущей и ведомой звездочкам и разжимному диску механизма вертикального перемещения при их взаимодействии с внутренними концами подпружиненных двуплечих рычагов.
Корпус устройства выполнен составным и разделен на тележку 1 с механизмом 2 горизонтального перемещения и укороченными направляющими 3 и на подъемник 4 с механизмом 5 вертикального перемещения, выполненный в виде замкнутых цепных передач 6 и направляющих роликов 7, установленных по боковым сторонам корпуса 8 механизма вертикального перемещения 5 на расстоянии, равном шагу ячейки по горизонтали. На подъемнике 4 установлены грузозахватное приспособление 9, привод 10 и коробка передач 11. Коробка передач 11 кинематически связана с механизмом 12 грузозахватного приспособления и механизмами вертикального 5 и горизонтального 2 перемещений. На звеньях цепи замкнутых цепных передач 6 механизма 5 вертикального перемещения закреплены несущие зажимные механизмы 13, выполненные в виде кронштейнов 14, закрепленных на звеньях цепи 15, на каждом основании 14 щарнир- но и крестообразно установлены подпружиненные двуплечие рычаги 16. Наружные плечи 17 подпружиненных двуплечих рычагов 16 снабжены фрикционными губками 18 и имеют возможность прижиматься к укороченным направляющим 3. Разжимные диски 19, установленные на ведущей 20 и ведомой 21 звездочках, имеют возможность взаимодействовать с внутренними плечами 22 подпружиненных двуплечих рычагов 16. На фиг. 3 показан стеллаж 213 и вертикальные направляющие 24.
Устройство работает следующим образом.
В исходном положении подъемник 4 прочно удерживается на укороченных направ- ляюцдих 3 тележки 1 фрикционными губками 18 на наружных плечах 17 подпружиненных двуплечих рычагов 16, установленных на замкнутых цепных передачах 6. , По команде-от ЭВМ или с пульта управления (не показан) штабелер выполняет команду взять груз 25 на исходной позиции. Включается привод 10 и через коробку передач 11 и механизм 12 грузозахватного приспособления грузозахватное приспособление 9 выдвигается для приема груза 25. Далее подъемник 4 перемещается на высоту, необходимую для снятия груза 25 с исходной позиции, и грузозахватное приспособление 9 возвращается в исходное положение. По команде «Положить груз в ячейку включается привод 10 и через коробку передач 11 механизм 2 горизонтального
перемещения передвигает тележку 1 в заданный адрес стеллажа 23. Переместившись в заданный адрес, тележка 1 по команде останавливается в заданном горизонтальном адресе стеллажа 23. В таком положении укороченные направляющие попадают точно
под вертикальные направляющие 24 стеллажа 23. Включается привод 10 и через коробку передач 11 вращение передается на механизм 5 вертикального перемещения. В верхней части замкнутых цепных передач 6 подпружиненные двуплечие рычаги 16
своими внутренними плечами 22 выходят из взаимодействия с разжимными дисками 19 и своими наружными плечами 17 с фрикционными губками 18 взаимодействуют с укороченными направляющими, а в нижней
части замкнутых цепных передач 6 подпружиненные двуплечие рычаги 16 своими наружными плечами 17 выходят из взаимодействия с укороченными направляющими, взаимодействуя с разжимными дисками 19, установленными на ведущих 20 и ведомых 21
звездочках. Подъемник 4 поднимается вверх, а направляющие ролики 7 обеспечивают нормальный переход с укороченных направляющих на вертикальные направляющие 24 стеллажа 23. Остановившись в адресе по вертикали, включается механизм 12 грузозахватного приспособления и грузозахватное приспособление 9 кладет груз 25. Положив груз 25, грузозахватное приспособление 9 возвращается в подъемник 4. Перейдя на укороченные направляющие, штабелер готов к горизонтальному пере
мещению.
Формула изобретения
Устройство для вертикального переме- щения грузоподъемного механизма, преимущественно стеллажного штабелера, содержащее гибкие замкнутые элементы, огибающие приводные и ведомые органы и расположенные с противоположных сторон корпуса грузоподъемного механизма напротив раз- мещенных на опорной конструкции вертикальных направляющих, и опорные органы, закрепленные на гибких замкнутых элементах для взаимодействия,с элементами опорной конструкции при вертикальном перемещении корпуса грузоподъемного механизма, отличающееся тем, что, с целью улучшения эксплуатационных характеристик путем обеспечения непрерывного процесса вертикального перемещения, опорные органы
выполнены в виде зажимов, состоящих из крестообразных подпружиненных двуплечих рычагов, шарнирно закрепленных на кронштейнах, которые установлены на указанных гибких элементах, а на ведущей и ведомой звездочках закреплены разжимные диски, причем подпружиненные двуплечие рычаги установлены с возможностью взаимодействий одними плечами с вертикальными направляющими опорной конструкции, а другими - с разжимными дисками.
(Риг.2
Фиг.4
/ i7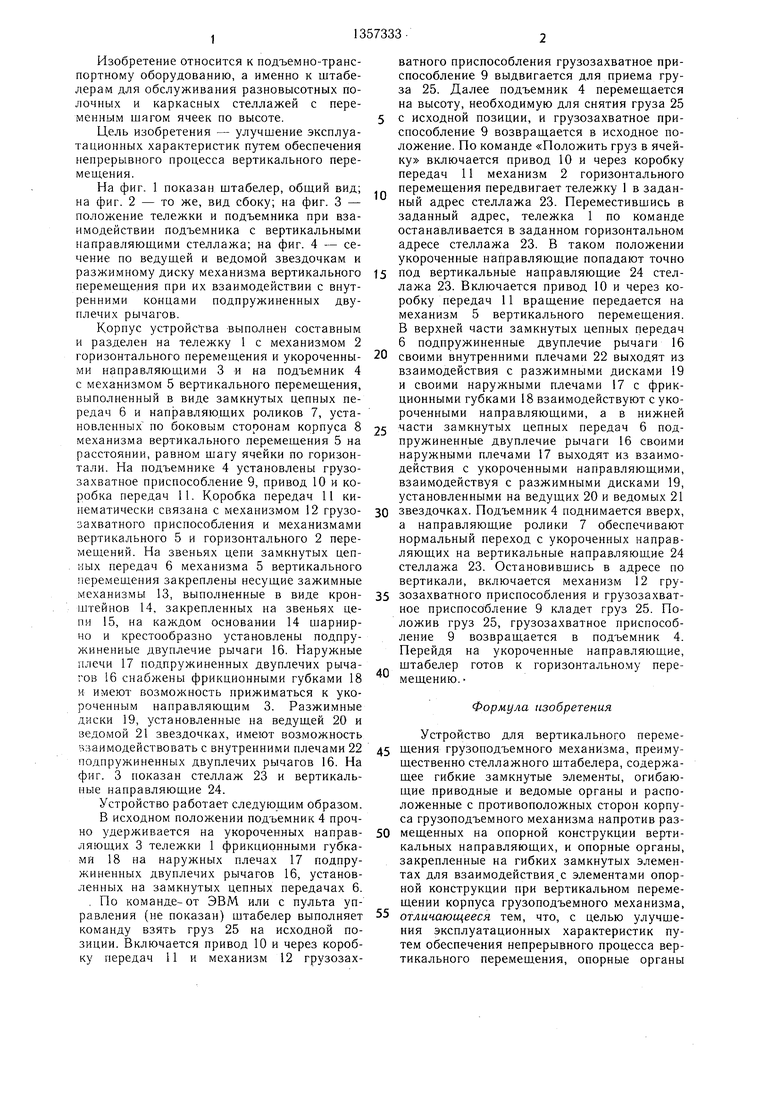
| название | год | авторы | номер документа |
|---|---|---|---|
| Штабелер для обслуживания полочных стеллажей | 1982 |
|
SU1031860A1 |
| Штаблер для обслуживания полочных стелажей | 1976 |
|
SU591379A1 |
| МНОГОЯРУСНАЯ МЕХАНИЗИРОВАННАЯ АВТОСТОЯНКА | 1997 |
|
RU2120012C1 |
| Склад для хранения затаренных грузов (его варианты) | 1984 |
|
SU1217729A1 |
| Устройство для загрузки и разгрузки стеллажей | 1986 |
|
SU1399226A1 |
| Грузоподъемная площадка крана-штабелера | 1978 |
|
SU887389A1 |
| ЗАГРУЗОЧНОЕ УСТРОЙСТВО | 1991 |
|
RU2030273C1 |
| АВТОМАТИЗИРОВАННАЯ ТРАНСПОРТНО-СКЛАДСКАЯ СИСТЕМА ДЛЯ КОЛЕСНЫХ ШИН | 1990 |
|
RU2013327C1 |
| Кран-штабелер | 1968 |
|
SU718342A2 |
| КРАН-ШТАБЕЛЕР | 1968 |
|
SU426938A1 |
Изобретение относится к подъемно- транспортному оборудованию, а именно к штабелерам для обслуживания разновы- сотных полочных и каркасных стеллажей с переменным шагом ячеек по высоте. Цель изобретения - улучшение эксплуатационных характеристик путем обеспечения непрерывного процесса вертикального перемещения. Корпус штабелера состоит из тележки 1 с укороченными направляющими и подъемника 4 с механизмом вертикального перемещения. На звеньях цепи 6 закреплены несущие зажимные механизмы 13, выполненные в виде кронштейнов. На каждой из которых установлены подпружиненные двуплечие рычаги. Подпружиненные двуплечие рычаги взаимодействуют своими наружными плечами с вертикальными направляющими опорной конструкции, выходя из взаимодействия с разжимными дисками, установленными на ведущих 20 и ведомых 21 звездочках. 4 ил. W со СП со 00 со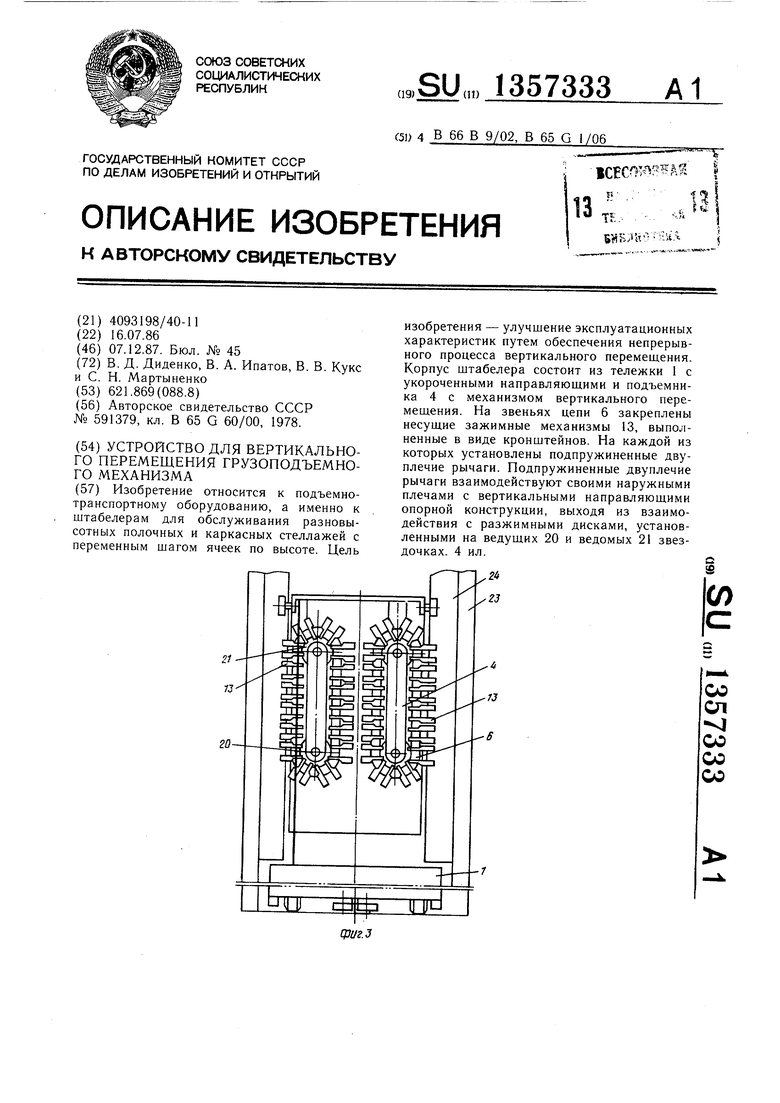
| Штаблер для обслуживания полочных стелажей | 1976 |
|
SU591379A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
