Изобретение относится к машиностроению и может быть использовано в захватных органах манипуляторов.
Целью изобретения является повышение надежности работы за счет повышения точности базирования детали.
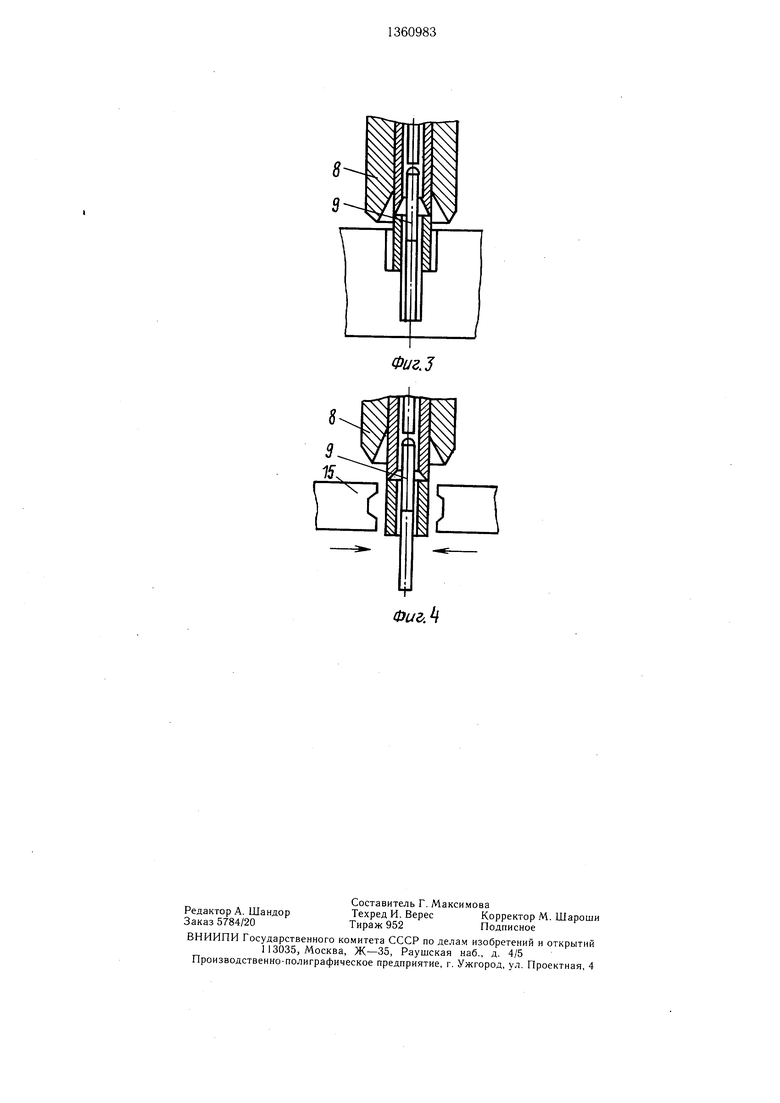
На фиг. 1 изображен захват в исходном положении без деталей; на фиг. 2 - положение втулки и упора в момент подхода корпуса к детали; на фиг. 3 - положение втулки, корпуса и упора с захваченной деталью; на фиг. 4 - то же, в момент подхода к детали обрабатывающего инструмента.
Вакуумный захват содержит направляю- ш,ие 1, закрепленные на станине (не показана). В направляющих I установлен с возможностью возвратно-поступательных перемещений корпус 2, связанный с приводом (не показан). В корпусе 2 выполнена полость 3, соединенная посредством полости 4 с вакуумной камерой (не показана). В полости 3 с кольцевым зазором относительно корпуса 2 и с возможностью продольных осевых перемещений размещен упор 5, который предназначен для регулировки глубины всасывания.
На корпусе 2 соосно упору 5 установлена с возможностью осевых возвратно-поступательных перемещений втулка 6, подпружиненная относительно корпуса 2 пружиной 7. На рабочем торце втулки 6 выполнена по внутреннему диаметру центрирующая конусная поверхность 8 для взаимодействия с захватываемой деталью 9, обладающей малой жесткостью. Диаметр детали 9 порядка 0,5 мм, а соотношение ее длины к диаметру около 40. На корпусе 2 щарнирно установлен двуплечий рычаг 10, который одним плечом кинематически связан с втулкой 6. На станине установлены упоры 11 -14, предназначенные для взаимодействия с двуплечим рычагом 10, а также закреплен инструмент для обработки деталей 9, например пуансоны 15.
Устройство работает следующим образом.
В исходном положении (фиг. 1) пружина 7 сжата и втулка 6 удерживается в верхнем положении посредством рычага 10, взаимодействующего с упором 14. При движении корпуса 2 по направляющим 1 в сторону
комплекта захватываемых деталей 9 втулка 6 освобождается от воздействия двуплечего рычага 10 и упора 14 и под действием пружины 7 надвигается на комплект деталей 9,
опережая корпус 2. Центрирующая конусная поверхность 8, выполненная на втулке 6, направляет детали 9 (фиг. 2) в полость 3. Цри дальнейщем движении корпуса 2 рычаг 10 взаимодействует с упором 13 и
втулка 6 останавливается. Корпус 2 продолжает движение до соприкосновения с упором 11. По команде от датчика включается вакуум и за счет разности давлений АР между атмосферным давлением и давлением внутри полости 3 комплект деталей 9 поджимается к упору 5 (фиг. 3). Затем приводной корпус 2 поднимается до встречи с упором 12 и комплект деталей 9 оказывается в зоне обработки, рычаг 10, взаимодействуя с упором 14, поджимает втулку б к корпусу 2, а пружина 7 сжимается, при этом открывается
доступ инструменту, например, пуансонам 15, для обжимки обрабатываемых деталей 9. Затем Ьтключается вакуум и комплект обжатых деталей 9 выпадает из захвата (или выдувается сжатым воздухом). Захват готов
к приему следующего комплекта деталей и цикл повторяется.
Формула изобретения
Вакуумный захват, содержащий корпус
с полостью, связанной с источником вакуума, центрирующий элемент и подпружиненную относительно корпуса втулку, расположенную соосно корпуса и имеющую возможность взаимодействия с захватываемой деталью, отличающийся тем, что, с целью повышения надежности работы, он снабжен двуплечим рычагом, шарнирно установленным на корпусе, а ,в полости корпуса установлен регулируемый упор, при этом подпружиненная втулка установлена на корпусе, а центрирующий элемент выполнен
в виде конусной поверхности на рабочем торце подпружиненной втулки, причем один конец двуплечего рычага кинематически связан с подпружиненной втулкой, а другой конец и корпус имеют возможность взаимодейстВИЯ с соответствующими технологическими упорами, установленными на рабочей позиции.
Фиг.З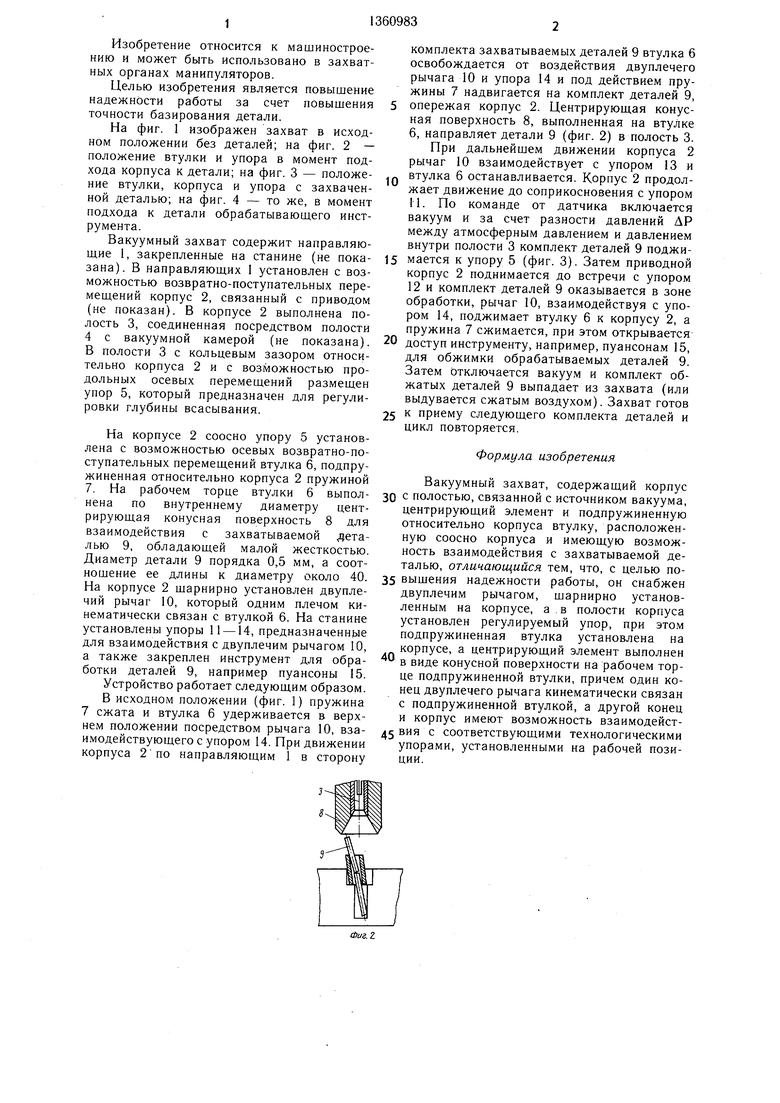
| название | год | авторы | номер документа |
|---|---|---|---|
| Многопозиционный автомат | 1981 |
|
SU1047613A1 |
| Микроманипулятор для установки узлов механизма часов | 1982 |
|
SU1083154A1 |
| Устройство для зажима детали | 1984 |
|
SU1225702A1 |
| Загрузочное устройство | 1988 |
|
SU1576272A1 |
| Устройство для набора прокладок во внутреннюю полость изделия | 1973 |
|
SU479608A1 |
| УСТРОЙСТВО для ПЕРЕМЕЩЕНИЯ ИЗДЕЛИЙ С ОДНОЙ ПОЗИЦИИ НА ДРУГУЮ | 1973 |
|
SU381498A1 |
| УСТРОЙСТВО ДЛЯ ЗАХВАТА И УСТАНОВКИ ДЕТАЛЕЙ | 1991 |
|
RU2010692C1 |
| Вакуумный захват (его варианты) | 1984 |
|
SU1201214A1 |
| Вакуумное захватное устройство | 1980 |
|
SU925836A1 |
| Устройство для запрессовки втулок в корпусную деталь | 1987 |
|
SU1449308A1 |
Изобретение относится к машиностроению и может быть использовано в захватных органах манипуляторов. Целью изобретения является повышение надежности работы. Для этого захват, содержащий корпус 2 с полостью, связанной с источником вакуума, относительно которого подпружинена втулка 6, снабжен двуплечим рычагом 10, шарнирно установленным на корпусе 2, а в полости корпуса 2 установлен регулируемый упор 5. При движении корпуса 2 в сторону захватываемых деталей 9 втулка 6 освобождается от воздействия двуплечего рычага 10 и упора 14 и под действием пружины 7 выдвигается относительно корпуса 2 в сторону детали 9. Центрирующая конусная поверхность 8, выполненная на втулке 6, направляет детали 9 в полость 3. Цри дальнейшем движении корпуса 2 рычаг 10 взаимодействует с упором 13, в результате этого втулка 6 останавливается, а корпус 2 продолжает движение до соприкосновения с упором 11. Затем включается источник вакуума и деталь 9 поджимается к упору 5. 4 ил. iS (Л О2 Oi О со 00 со Фиг,
| Вакуумный схват | 1982 |
|
SU1038221A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
